基于传统滑模控制的永磁同步电机SVM-DTC控制研究毕业论文
2020-04-08 14:26:56
摘 要
Abstract II
第1章 绪论 1
1.1研究目的及意义 1
1.2 国内外的研究现状 1
1.3 主要研究内容 2
第2章 永磁同步电动机数学模型 3
2.1 永磁同步电机概述 3
2.2 abc三相静止坐标系数学模型 4
2.4 dq两相转子磁链同步旋转坐标系数学模型 6
2.5本章小结 8
第3章 传统IPMSM SVM-DTC系统研究 9
3.1传统IPMSM系统 9
3.2传统IPMSM系统原理框图 10
3.2.1三相电压源逆变器的工作原理 11
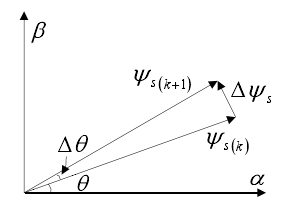
3.2.2 磁链控制原理 12
3.2.3 永磁同步电机直接转矩控制系统的实现 14
3.3IPMSM SVM-DTC系统 15
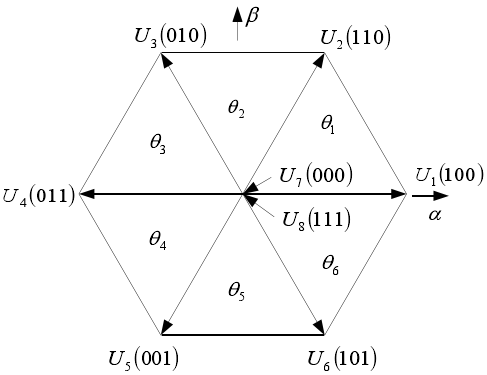
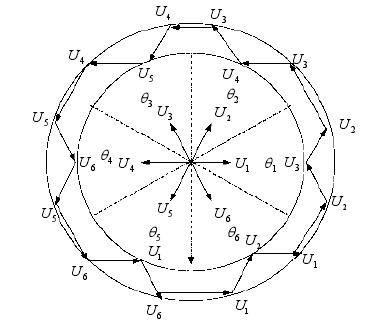
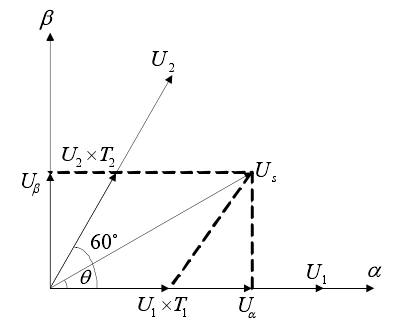
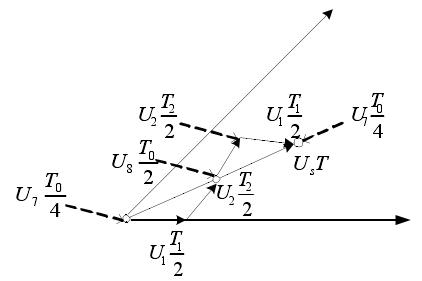
3.3.1 SVPWM 原理介绍 15
3.3.2 SVPWM 的算法 16
3.3.3基于 SVPWM 的直接转矩控制系统 20
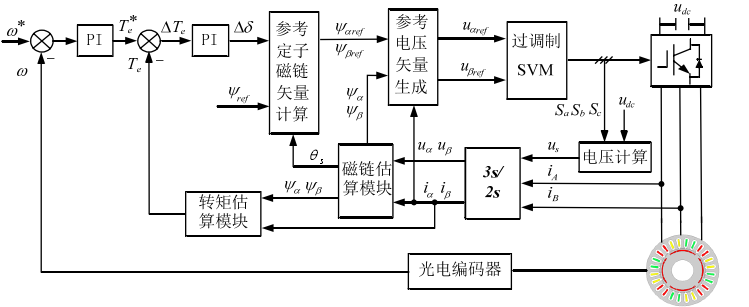
3.4IPMSM SVM-DTC系统原理框图 22
3.5本章小结 23
第4章 仿真研究 24
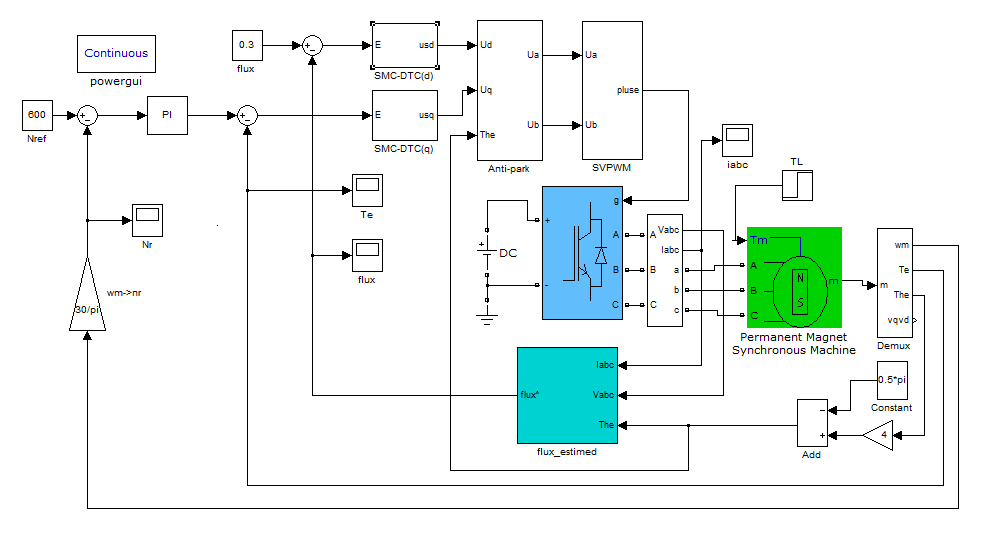
4.1仿真建模 24
4.2仿真结果分析 25
4.3 本章小结 27
第5章 总结与展望 28
致谢 29
参考文献 30
附录 31
摘 要
永磁同步电机具有结构简单,易操作,效率高,并且转速范围宽等诸多优点,所以永磁同步电动机被广泛应用于机械工程,航空航天和电力牵引变换等领域,本论文重点论述的是SVM-DTC控制技术,再加上滑模控制技术,最终的方向为基于传统滑模控制的永磁同步电动机SVM-DTC控制研究,该课题具有重要的实际意义和理论意义。
本文大量结合中外优秀文献,在一开始我们先通过对于直接转矩控制思想进行着手,发现该技术的一些缺点与不足之处,接下来再通过SVM-DTC调制技术进行优化传统DTC技术的不足之处。
首先,建立永磁同步电机的数学模型,随后阐述直接转矩控制原理,在论述中发现在这种控制下,电动机转矩与磁链脉冲太大,并且其逆变器开关频率也不是恒定的,故引入空间电压矢量调制技术,详细分析SVPWM的算法与实现过程,从SVM-DTC控制理论的角度实现对直接转矩控制技术的优化,降低转矩与磁链脉冲过大的问题,实现优化目标。最后再用仿真软件MATLAB进行模块搭建与仿真,通过仿真的结果来验证此次优化是否达到了预期,并反思在哪个模块的不足与改进。
关键词:传统DTC技术;滑模控制;SVM-DTC控制理论
Abstract
Permanent magnet synchronous motor has many advantages such as simple structure, easy operation, high efficiency, wide speed range, etc. Therefore, permanent magnet synchronous motor is widely used in mechanical engineering, aerospace and electric traction transformation, etc. This paper follows the traditional three-phase permanent. The idea of magnetic synchronous motor direct torque control, combined with space voltage vector modulation technology, that is, SVM-DTC control technology, coupled with sliding mode control technology, the final direction is based on traditional sliding mode, the topic has important practical significance and theoretical significance.
In this paper, a large number of Chinese and foreign excellent literatures are introduced. and the SVM-DTC control theory are introduced.
First, explain the principle of direct torque control. In the discussion, it is found that under this control, the motor torque and the flux pulse are too large, and the inverter switching frequency is not constant. Therefore, the introduction of space voltage vector modulation technology, detailed analysis of the SVPWM algorithm and implementation process, from the perspective of SVM-DTC control theory to achieve the optimization of direct torque control technology, reduce the torque and the excessive magnetic flux pulse problem, to achieve optimization aims. Finally, the simulation software MATLAB was used to build and simulate the module. The results of the simulation were used to verify whether the optimization achieved the expected result and to reflect on which module was insufficient and improved.
Keywords: direct torque control;Sliding mode control ; SVM-DTC control
第1章 绪论
1.1研究目的及意义
三相永磁同步电动机,它的设计突出了一些优点如下:快速的响应,极好的效率,很低的惯性指数,很低的内部损耗,还有高功率的密度。这些优点使得永磁同步电机拥有了十分优良的低速性能,正因为这些优点,所以在伺服驱动方面的领域,使得永磁同步电机有了很广泛的应用。在1977年piunkett教授首先在IEEE杂志上发表提出了直接转矩控制的思想,该理论的提出让整个世界看到了科技的力量,掀起了直接转矩控制的热潮,后来,在1985年,德国鲁尔大学的Depenbrock教授应用直接转矩控制技术实现了成功,在控制中,响应速度相当快,并且在该实验中只有在计算定子磁链的时候采用到了定子绕组电阻,同时对各种电机参数的依赖不是很大,这一点就很有实际与理论意义。
为了增强提高直接转矩系统的控制性能,整个学术界在进行改进方案不断优化的浪潮,最后提出了两种代表性的方案,一种是电压空间矢量细分,第二种就是本文的核心,SVM-DTC控制方案,简要分析,第一种方案虽说有一点优化措施,但还是存在电压矢量有限的缺点,SVM-DTC控制理论,在理论上是可以依据电动机转矩角的大小程度来对转矩和磁链脉冲进行有效的完全补偿,对于磁链控制方面,因为反电动势积分的磁链观测电压模型简单并且相比较来说易于实现,但在低速运转时电机受外界影响很大,随之而来的问题就是会产生定子磁链直流偏置,学术界为了解决该问题又提出了很多方法,比如定子电阻在线估计和死区时间补偿和非线性正交反馈补偿磁链观测器等等。因为电流模型磁链观测器在转子的位置方面受速度大小影响较小,所以磁链观测准确适用于频带更宽的调速范围,但同时又要准确测定定子电感和转子磁链的问题。
1.2 国内外的研究现状
在20世纪的七八十年代,在调节电机调速系统发展的黄金时代,在这几年,众多电机新型技术如雨后春笋般涌出,很多国内外学者都在电机控制等方面做出了突出的贡献,因为在电机系统里,电磁转矩这个量就是整个电机的灵魂,因此大量的新型技术都是电磁转矩这个量作为突破点,因此,电机的电磁转矩也是重要的重要物理量,无论是电动式调节系统还是发电式电源系统。直接转矩控制技术,电磁转矩识别在电机控制的重要性,通过控制电磁转矩而直接取得优良性能。 20世纪80年代。德国学者M.Denpenbrock和日本著名学者I. TaKhasi Ji发明了一种异步电动机的直接转矩控制原理。在1994年,ABB推出了第一次根据直接转矩控制的异步电动机的通用变电站设备的变频产品,ABB后来直接宣称只研究发展直接转矩控制。由于永磁材料的性能在二十世纪下半叶有了很大的改善,永磁同步电机在工业中得到了广泛的应用。为了提高永磁同步电动机的调速系统,在1986年异步电动机上直接转矩控制技术取得成功后,学术界自然而然的很希望在永磁同步电动机调速系统中得到应用。于是在20世纪70年代异步电动机矢量控制技术成功后,矢量控制技术很快轻而易举地应用到了到了正弦波永磁同步电动机,起初学者们认为在DTC技术的推广的方面问题也不大,但是,出人意料的是,从1986年到1996年努力了十年并未成功。这十年中,确实有两三篇论文声称解决了正弦波永磁同步电动机DTC技术的问题,但仔细一阅读就会发现,它们不是真正意义上的DTC技术,因为它们和矢量控制一样,还是有电流环,还是通过控制电流来间接控制电磁转矩,而不是用空间电压矢量直接去控制电磁转矩,因此不能说是DTC技术。迟迟不能将异步电动机的DTC技术推广到正弦波永磁同步电动机的原因是,异步电动机的DTC技术是建立在转差概念上,而永磁同步电动机没有转差,异步电动机的DTC技简单地推广是不可能的,必须进行一定的创新才行。
从以上可以看到,20多年来DTC技术无论是对电动机调速方面还是在发电方面都有许多引人注目的成绩,这么多的成果如想归于一面,显然是不可能的。所以需要更多的创新技术,让我们国家的电动机技术更上一层楼,进而转化为生产力,为人民造福。
1.3 主要研究内容
研究目标为:此次毕业设计,针对基于传统滑模控制的三相永磁同步电动机,从直接转矩控制上说明问题,根据文献里的分析,在传统DTC控制下,会出现一些问题,这些问题就是会出现定子磁链脉冲过大且难以控制,并且电机的电磁转矩也是太大且不利于接下来的研究。针对这些问题,提出SVM-DTC控制,进而提升电动机系统的动态性能和静态性能,从而达到研究目标,实现优化目标。研究内容如下:
1)传统滑膜控制的永磁电动机控制特点、原理、框图;
2)针对电机系统存在的转矩和磁链脉冲大的的特点,分析原因,并采取空间电压矢量调制技术与DTC相结合的方法建立永磁同步电机的数学模型。
3)用MATLAB仿真软件搭建系统模块,对仿真结果进行分析,分析是否降低了电动机运行中系统的电磁转矩和磁链脉冲过大的问题和是否提高了系统的动静态性能。
第2章 永磁同步电动机数学模型
2.1 永磁同步电机概述
电动机行业,众人周知,为一个传统的行业,从电动机行业的出现,发展,到现在已经一步一个脚印的发展并成为了工业制造生产和人们日常生活中不可或缺的王牌产业,当然,电动机的种类非常之多,但大部分的电动机还是感应电机,所以,全世界的感应电机产业有序健康发展对每个国家的国民经济GDP发展有着不可代替的作用。随着上世纪70年代学者们对感应电机矢量控制理论的总结,使得感应电机的动态性能可以媲美直流电动机的动态性能。感应电机与直流电机相比,其优点为成本低,简单的结构,工作性能可靠,维护起来方便,惯性较小,效率高。
永磁同步电机,其英文名称缩写为IPMSM,实际上永磁同步电机本质上是一种交流电机,它的定子绕组运行实质是三相相位差分别为120°的交流电,同时其转子绕组则主要由永磁体构成,用于被定子绕组线圈切割磁感线。所以此类电机相比于其他类型的电机最大的优点就是交流电的能量由直流电源提供的,如此一来我们就可以对电机进行精确的控制同时又解决了电刷的使用寿命过短的问题。所以该励磁方式为过去几十年间发电机的主要励磁方式,并且有很成熟的运行经验。但也不是完美的,随着运行会带来一些缺点,励磁调节速度较慢,维护工作量大,所以在实际操作中,超过10MW以上的机组是不会采取此类励磁方式。
永磁同步电机因为其内部构造,所以其为一个高阶且具有强耦合,多变量的非线性系统,所以从正常的思维角度出发,其很难去建立一个精确的数学模型去模拟永磁同步电机,故而我们在对永磁同步电机进行数学模型构建的时候,通常做出如下几点假设,首先,我们会忽略它的磁滞和涡流损耗,并且不计其铁芯的饱和影响,同时假设电机的反电动势波形为正弦波,这一点就很重要,由此一来,就忽略了转子上的阻尼绕组,并且假设永磁体上无阻尼作用,因为以上的假设,我们会在对永磁同步电机数学建模时采取以下的四种坐标变换,如下文所述。
2.2 abc三相静止坐标系数学模型
 这三相的三个轴线依次对应于电机的三相绕组轴线,电机电压,电流和磁链在该坐标轴上的分量,当然这都是建立在在该坐标系下的。在这个坐标系的情况下,三相电机的数学模型只能用一组微分方程表示,这也是该电机的电机方程,因为这个微分方程为高阶方程,并且牵扯的量太多,所以解此方程相当困难。
这三相的三个轴线依次对应于电机的三相绕组轴线,电机电压,电流和磁链在该坐标轴上的分量,当然这都是建立在在该坐标系下的。在这个坐标系的情况下,三相电机的数学模型只能用一组微分方程表示,这也是该电机的电机方程,因为这个微分方程为高阶方程,并且牵扯的量太多,所以解此方程相当困难。
在 三相静止坐标系下电动机的电压方程为:
三相静止坐标系下电动机的电压方程为:

(2.1)
式(2.1)中,三个磁通分别代表了定子磁链矢量, 这个量是定子端相电阻,
这个量是定子端相电阻, 这三个矢量对应电机定子绕组的三个三相电压矢量,方程中的三个电流对应的是定子端绕组电流矢量。
这三个矢量对应电机定子绕组的三个三相电压矢量,方程中的三个电流对应的是定子端绕组电流矢量。
三相abc静止坐标系和 两相静止坐标系之间的变换为:
两相静止坐标系之间的变换为:

(2.2)

(2.3)
在式(2.2)与(2.3)中, 这个参量是该坐标进行变换时的前后系数,这个系数连接了变换前后,起到了桥梁转换的作用,功率恒定进行变换时和幅值恒定变换时,转换系数是不同的,一对为1和2/3,另一对为两个2/3
这个参量是该坐标进行变换时的前后系数,这个系数连接了变换前后,起到了桥梁转换的作用,功率恒定进行变换时和幅值恒定变换时,转换系数是不同的,一对为1和2/3,另一对为两个2/3
 两相转子磁链同步旋转坐标系与三相
两相转子磁链同步旋转坐标系与三相 静止坐标系之间的坐标变换是:
静止坐标系之间的坐标变换是:

(2.4)

(2.5)
式(2.5)中, 已在前面解释过,还是一个变换系数而已,当采用恒功率变换时和幅值恒定不变情况下进行了变换,变换系数C的值和前文一样。
已在前面解释过,还是一个变换系数而已,当采用恒功率变换时和幅值恒定不变情况下进行了变换,变换系数C的值和前文一样。
根据电机磁链,电流和电感之间的关系有如下定子绕组的磁链数学表达式:

(2.6)
式(2.6)中, 是三相电机中
是三相电机中 相的定子绕组自感量,
相的定子绕组自感量, 这个物理参量,是三相中的
这个物理参量,是三相中的 相绕组与
相绕组与 相绕组的相间互感参量,这两个物理参量都是
相绕组的相间互感参量,这两个物理参量都是 的函数。
的函数。
2.3 两相静止坐标系数学模型
两相静止坐标系数学模型
在该坐标系中,两个定子电压是按照以下两个公式表达出来的:

(2.7)

(2.8)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


