一种汽车乘坐舒适度测评系统设计毕业论文
2020-04-09 14:06:59
摘 要
本文的设计主要是以51单片机为核心,通过三轴加速度传感器MPU6050来采集汽车座椅支撑面的三轴加速度,在数据经过了初步处理后发送到PC机,经过LABVIEW编写的上位机处理后,作出最终评价。根据评价所得到的结果,可以对汽车的生产方向进行一定的指导。
- 进行汽车乘坐舒适度评价方法的研究。通过查阅相关文献及国际标准,确定汽车乘坐舒适度的评价方法。最终选择了ISO2631作为本设计的评价标准。
- 进行以51单片机为核心的元器件的选择和硬件电路的设计。通过查阅相关文献和使用手册,选择设计所需的三轴加速度传感器,并设计完成相关硬件电路。最终选择了三轴加速度传感器MPU6050来完成下位机的设计。
- 进行下位机及上位机的相关程序的编写。根据ISO2631评价标准,确定下位机及上位机所需的功能,并选择合适的软件来完成相关程序的编写。最终选择了Keil uVision5和LABVIEW来编写相关程序。
关键词:汽车乘坐舒适度;51单片机;MPU6050;LABVIEW
Abstract
The design of this article is based on the 51 series one-chip computer as the core, through the triaxial acceleration sensor MPU6050 to collect the triaxial acceleration of the car seat support surface, after the data has been processed and sent to the PC, after processing by the upper computer prepared by LABVIEW, Make a final evaluation. The evaluation results have a certain guiding significance for the production direction of the car.
1.Carry out a study on the evaluation method of car ride comfort. Through the review of elevant documents and international standards, determine the evaluation method of car ride comfort. In the end, ISO2631 was selected as the evaluation standard of this design.
2.Hardware design with 51 series one-chip computer as the core. Through the review of relevant documents and user manuals, the triaxial accelerometers required for design are selected and related hardware circuits are designed and completed. Finally, the three-axis acceleration sensor MPU6050 was selected to complete the design of the lower computer.
3.The preparation of the lower computer and the upper computer program. According to the ISO2631 evaluation standard, determine the functions required by the lower computer and the host computer, and select the appropriate software to complete the preparation of the relevant program. Finally, Keil uVision5 and LABVIEW were selected to write the relevant program.
Key Words:car ride comfort;51 series one-chip computer;MPU6050;LABVIEW
目录
第1章 绪论 1
1.1 论文的研究背景及意义 1
1.2 国内外研究现状 1
1.3 设计的主要内容 2
第2章 汽车的乘坐舒适性的评价标准 4
2.1 汽车的乘坐舒适性的评价标准的选择 4
2.2 国际标准ISO2631-1:1997(E) 4
第3章 硬件电路的设计 8
3.1 单片机的选择 8
3.2 单片机外围相关电路的设计 9
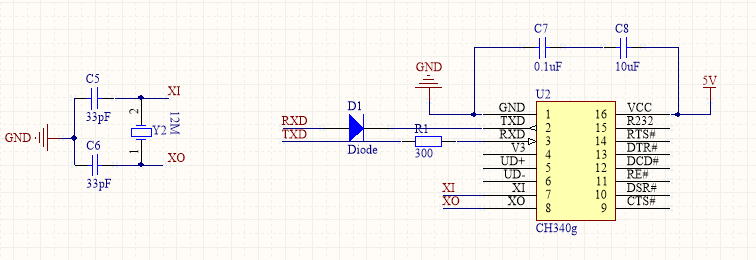
3.2.1 晶振电路的设计 9
3.2.2 复位电路的设计 9
3.2.3 电源电路及串口通讯电路 10
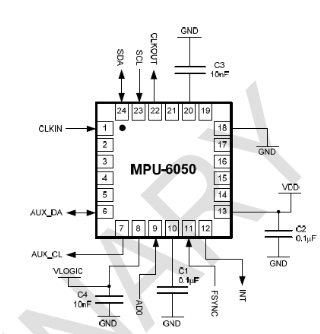
3.3 传感器的选择与设计 11
3.3.1传感器的选择 11
3.3.2传感器电路设计 12
3.4 稳压电路的设计 12
第4章 软件的设计 13
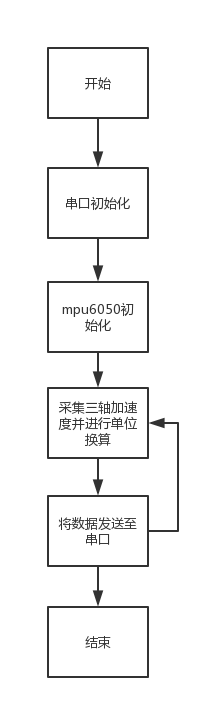
4.1 下位机的软件设计 13
4.1.1 Keil uVision5的简单介绍 13
4.1.2 单片机的程序设计 13
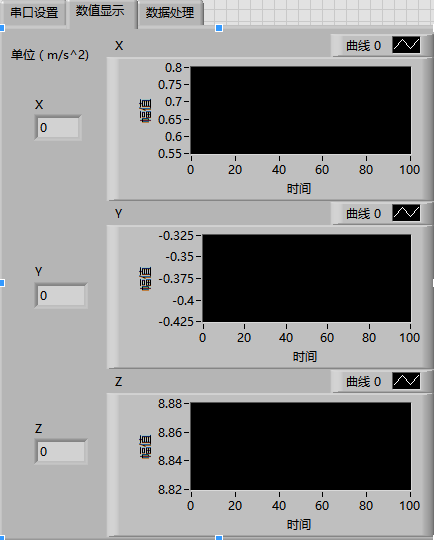
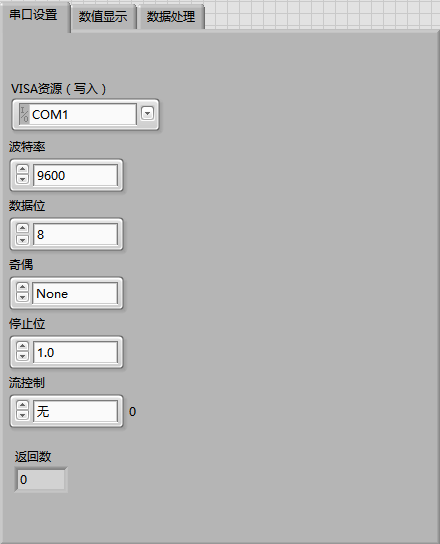
4.2 上位机的设计 14
4.2.1 LABVIEW的简单介绍 14
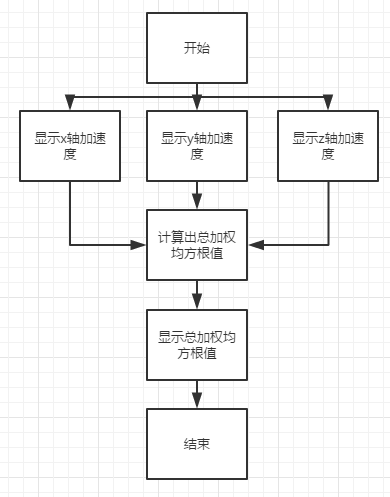
4.2.2 上位机的设计 15
第5章 实物仿真 20
第6章 误差分析与处理 22
6.1 误差计算 22
6.2 误差分析 23
6.3 误差处理 23
第7章 总结 24
参考文献 25
致 谢 25
附录一:元器件清单 26
附录二:上位机程序框图 26
附录三:单片机程序 26
附录四:电路原理图 26
绪论
论文的研究背景及意义
伴随着人们经济水平和生活水平的日益提高,人们对汽车的要求除了在动力性能和经济价值等几个方面外,对汽车的乘坐舒适性、可靠性以及智能化方面的要求也越来越高,而在这其中,汽车的乘坐舒适性给用户的体验是最直接的,这直接决定了用户是否购买该汽车,所以,在近年来,汽车的乘坐舒适性受到了各大整车厂和零部件企业的广泛关注。
影响汽车的乘坐舒适性的主要因素有两个,一个是汽车车内的振动,另一个是汽车的噪声水平,而优越的车辆乘坐舒适性,不仅要求汽车能够阻绝来自发动机和传动系统等零件的振动,以及路面激励通过轮胎及悬架系统传递给乘坐者的振动感受,还要求其能够隔绝来自车外的噪声,所有的这些与车辆乘坐舒适性相关的研究是汽车进行生产研究的主要内容。所以说,对于汽车的乘坐舒适性的评价是汽车生产研究的重点研究对象之一。
实际上,西方发达国家对汽车的乘坐舒适性的评价的研究相对要早一些,而相对来说,我国对汽车的乘坐舒适性的评价的研究起步就晚了一些。
主观评价和客观评价是汽车的乘坐舒适性的评价的两大类。客观评价——通过测量车辆振动加速度等各种相关的物理量来对汽车的乘坐舒适性进行评价。客观评价主要是去考虑汽车的隔振能力,当然人对不同振动的感受程度也会被考虑到。主观评价主要体现了人的主观因素,乘坐人员通过对汽车的舒适性进行亲身体验,最后通过采用打分等方式作出定性的评价,并不需要用到额外的测试设备,不过其对评价者的要求较高,评价者往往都是经过系统培训、经验丰富的评车专家。不过随着基础理论的深入研究与发展和科学技术的进步,到目前为止,主客观综合评价的研究方法也越来越趋向于成熟,这一现状在一定程度上解决了过去的一些主客观评价不一致的问题,这样一来,客观评价的结果对乘坐人员的主观心理感受的反映也越来越好。
1.2 国内外研究现状
到目前为止,汽车的乘坐舒适性是汽车生产的重要影响因素之一,它与汽车自身的固有振动属性及此同时车内的环境、乘坐人员的心理状态以及生理状态有关。所以说,汽车的乘坐舒适性评价是非常复杂,国内外与研究人员进行了大量的研究,取得了许多的成果。
在1931年,Reiher和Meister便在振动台架上对多名志愿者进行了一次测试,完成了对汽车的乘坐舒适性的主观评价的初步探索。当然,在这之后,也有许多人进行了类似的实验,得到了许多评价方法及标准,其中比较出名的是Dieckman的K系数法和Janeway准则。不过由于实验的局限性,此类评价方法及标准较为片面,不具备实际价值。
1968年,Lee R. A.和Pradko F等人提出了一种新的评价方法——吸收功率法。德国的Mitschke教授于1972年,提出了另一种新的评价方法——用汽车的整体纵向加速度的均方根以及乘坐人员座椅坐垫垂直方向的加速度均方根来对汽车的乘坐舒适性进行评价。而在1986年,Griffin 教授提出了新的理论——“总乘坐值法”。虽然这些方法都各有不足,但已经逐渐确定了汽车的乘坐舒适性的评价体系。
国际标准化组织ISO于1997年颁布了最新的国际标准ISO2631-1:1997(E),该标准和之前ISO所制定的各项标准相比有了很大的改变,而且对汽车在周期、瞬态以及随机工况等不同情况下,乘坐人员可能受到的全身振动的测量方法都给出了一个比较明确的规定,并且第一次给出了人体坐姿的坐标系,这个坐标系充分考虑到了乘坐人员座椅支撑面、靠背和脚地板各个位置的三个方向的线振动,及乘坐人员座椅支撑面处三个方向的角振动,所加起来共十二个方向的振动。当汽车处于随机工况时,该标准的评价结果能够较好的和乘坐人员的主观评价相一致,因此,ISO2631-1:1997(E)[6]标准在当下得到了广泛的应用。
虽然我国对汽车的乘坐舒适性的评价的研究相对于国外来说起步晚了一些,但是自从70年代以来,伴随着有关汽车领域的各种学科理论的发展及引进、研制出的一批先进的实验仪器设备,国内对汽车的乘坐舒适性的评价的相关研究有了快速的发展。
2010年,在经过不断修正后,我国公布了新的国家标准——GB/T4970-2009《汽车平顺性试验方法》。随后,这一个评价标准被用来完成对汽车在随机工况下的乘坐舒适性的评价。它取代了曾经的GB/T5902-1986和GB/T4970-1996标准,初步形成了一个汽车的乘坐舒适性的评价体系,当然,该体系算不上完美,还有许多的进步空间。
1.3 设计的主要内容
本论文的研究设计是为了解决汽车的乘坐舒适性的主观评价不足的问题,由于条件有限,这里选择座椅支撑面为研究对象,设计一个测控系统,对汽车当前座椅支撑面乘坐人员的主观感受作出评价。
全文主要内容如下:
- 选择适当的评价标准,初步确定设计方案;
- 选择适当的元器件,完成硬件电路的搭建;
- 利用Keil 5软件来编写相关的单片机程序,完成下位机的软件设计;
- 利用LABVIEW软件来编写相关的上位机程序,完成上位机的软件设计;
- 对测控系统进行仿真,并分析误差来源和相应的解决办法。
本次设计的系统框图如下:
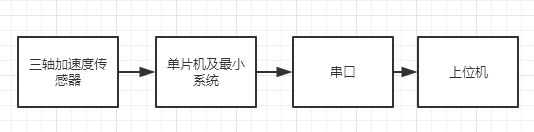
图1.1 系统框图
汽车的乘坐舒适性的评价标准
2.1 汽车的乘坐舒适性的评价标准的选择
虽然汽车的乘坐舒适性的评价标准版本众多,但考虑到被认可的程度和出版时间,被筛选出的可供选择的评价标准有两个,一个是国际标准ISO2631-1:1997(E),一个是我国的国家标准GB/T4970-2009。
两者的不同大致上分为两处,一处是规定的人体坐姿受振模型不同,另一处是频率加权网络不同。考虑到研究对象为座椅支撑面,两者之间的区别就显得并不是很大,仅仅是频率加权系数有所不同,为了增加该设计的测控系统的应用范围,被广泛认可的国际标准ISO2631-1:1997(E)就成为了上佳的选择。
2.2 国际标准ISO2631-1:1997(E)
该标准不仅规定了人体坐姿受振模型,还对该模型进行了绘制[6],绘制结果如下图2.1所示:

图2.1 人体坐姿受振模型
这个国际标准认为人体受到了总共十二个方向的振动分量。考虑到了不同振动分量对乘坐舒适性的不同影响,该国际标准还规定了各方向振动分量的轴加权系数k[6]。如下表所示:
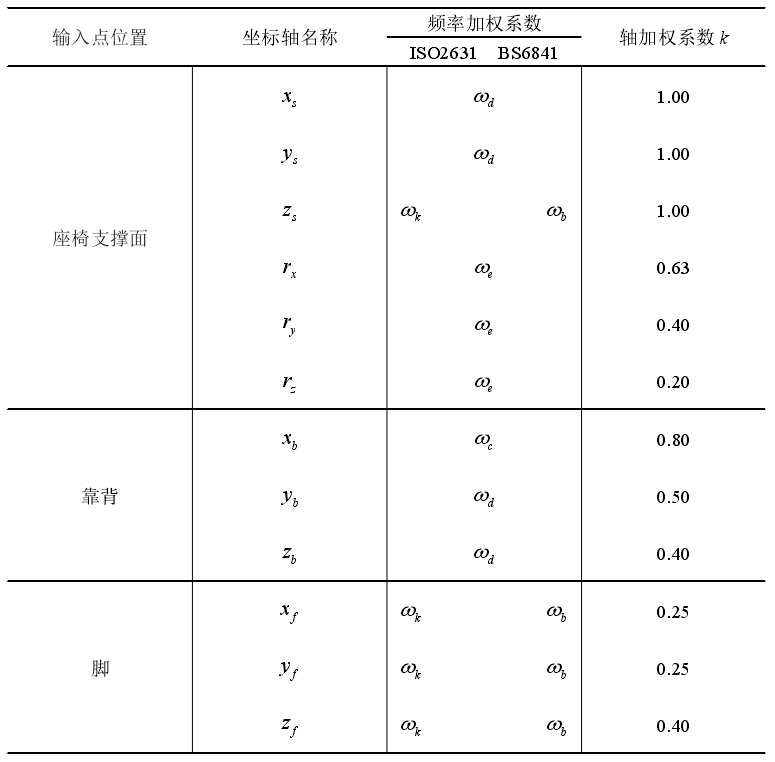 表2.1 ISO2631-1:1997(E)和BS6841标准的各轴向振动分量的加权系数值k以及频率加权函数
表2.1 ISO2631-1:1997(E)和BS6841标准的各轴向振动分量的加权系数值k以及频率加权函数
国际标准ISO2631-1:1997(E)的基本评价方法如下:
第一步,通过测量和计算,得到每个方向的加权加速度均方根值aw。计算方法如下:先将采集信号的加速度时间历程a(t)经过频率加权函数w(f)后得到各个振动分量的加权加速度时间历程aw(t),之后在时间T内,利用时域积分法可以得到aw。计算公式如下:

各个振动分量的加权加速度均方根值aw还有另一种计算方法,具体的计算过程如下:对加速度时间历程a(t)进行分析,得到密度函数Ga(f),接着利用下式(2.2),就可以计算出经过频率加权后的加速度均方根值aw。

两种计算方法一般无二的,其中w(f)可由式(2.3)~(2.6)来近似表示,式中字符f代表频率,它的单位是Hz。
Yo




由于所测得的座椅面振动信号只有坐标系三个方向的,所以最终的总加权加速度均方根值aw 可以利用式(2.7)来计算,其中axw、ayw、azw分别为坐标系三个方向的经过频率加权后的加速度均方根值。其中横轴方向的加权系数为1.4,竖轴方向的加权系数为1.0。
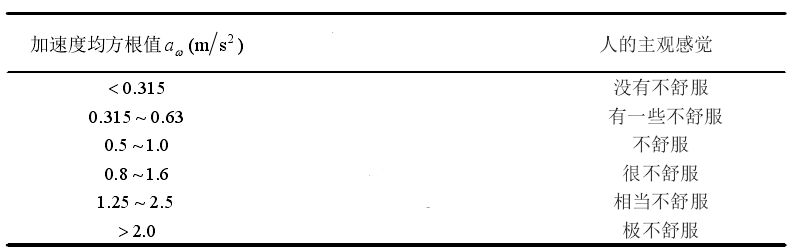
表2.2给出了总加权均方根值aw与人的心理感觉之间的关系。

新的国际标准ISO2631-1:1997(E)在评价方面有了很大的改进,测试结果也更加准确[6]。这种评价方法根据总加权加速度均方根值给出了车辆的乘坐舒适度评价,该评价标准是根据人的主观感受来进行划分的,比旧的国际标准中评价标准的规定的3个界限值更加具体,也更容易理解和接受,所以说,这种评价方法目前被广泛使用。
表2.2 aw与人的主观心理感觉之间的关系
硬件电路的设计
3.1 单片机的选择
目前常用的51单片机一般是Intel公司的AT系列和STC公司的STC系列[4],两者相比,STC公司的STC系列的单片机是新一代的单片机,指令代码兼容性强,速度却快了8倍有余,该系列单片机还有加密性好,抗干扰强的优点。所以这里选择STC公司的STC系列的单片机。
常用的STC系列的单片机有两种,一种是STC89C51,另一种是STC89C52。两者虽然功能相似,但仍然有一些区别:前者的RAM只有128字节,而后者的RAM却有256字节;前者的内存为4k,后者的内存为8k。由于本次设计所需的传感器为三轴加速度传感器,数据采集量大,考虑到这一点,这里选择单片机STC89C52。
本次设计利用单片机STC89C52,再配合电阻、电容、晶振等元器件,构成了围绕单片机的基础硬件电路,其它各模块的硬件电路围绕单片机的基础硬件电路展开,单片机的电源供电采用USB 5V供电。
STC89C52单片机其外部引脚图如图3.1所示。
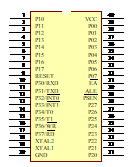
图3.1 STC89C52单片机引脚图
其中,在本次设计中用到的各引脚的接法分别为:
① 主电源引脚
把VCC(40脚)与+5V电源正端相接;
把GND(20脚)与+5V电源地端相接;
② 外接晶体或外部振荡器引脚
把XTAL1(19脚)与外部晶振相接。
把XTAL2(18脚)与外部晶振另一端相接。
③ 控制信号线
把复位信号输入端RESET(9脚)与复位电路的RESET相接。
把EA(31脚)与+5V电源正端相接。
④ 多功能I/O口引脚
把P1.6、P1.7口(7、8脚)分别于三轴加速度传感器的串行时钟线、串行数据线相接。
把P3.0、P3.1口(10、11脚)分别于串口通讯电路的串行口数据接收端RXD、串行口数据发送端TXD相接。
3.2 单片机外围相关电路的设计
结合本次设计中需要用到的单片机功能,可以分析出其所需要的相关电路,它包括了晶振电路、复位电路、电源电路及串口通讯电路。参考单片机STC89C52的使用手册,我们可以设计出上述电路。
3.2.1 晶振电路的设计
单片机的晶振通常为11.0592MHz和12MHz,根据不同的功能,可以选择出不同的晶振。这里考虑到串口通讯电路,为了使之保持稳定,不能让晶振的频率太大,所以这里选择了11.0592MHz晶振。
晶振电路是下位机的硬件电路的时钟电路,是整个下位机的关键,它为整个下位机提供了稳定而又可靠的时钟信号。晶振电路电路图如图3.2所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


