基于Creo平台的MQ4035门机象鼻梁结构设计毕业论文
2020-04-09 14:12:45
摘 要
门座起重机是广泛应用于散货及件杂货码头的一种臂架型起重机。其臂架系统的好坏直接影响了整机的工作效率。而象鼻梁作为臂架系统的主要组成之一,其设计的好坏对整机的安全工作及活配重乃至整机的重量都有着重要影响,且象鼻梁作为直接承受起升载荷的构件必须确保其强度、刚度、稳定性符合要求。
本文根据设计任务书对臂架系统的货物水平系统及臂架自重平衡系统进行了设计,并对其进行了校验。再此基础上对象鼻梁及大拉杆进行了结构设计并通过Creo软件对其进行了三维建模,最后利用workbench软件对象鼻梁及大拉杆进行了强度、刚度校核。此外还利用Creo导出了象鼻梁及大拉杆的工程图。
关键词:门座起重机; 象鼻梁; Creo; workbench
Abstract
Gantry crane is a boom type crane widely used in bulk cargo and general cargo terminals. The quality of the boom system directly affects the overall work efficiency. The elephant trunk is one of the main components of the boom system. Its design has an important influence on the safety work of the whole machine, the live weight and the weight of the whole machine. The nose-beams must be used as the components that directly bear the lifting load. Make sure its strength, rigidity and stability meet the requirements.
Based on the design task book, this article designs the boom level system and the boom self-balancing system and verifies it. On this basis, the structure of the nose and the big tie rod was designed and modeled by Creo software. Finally, strength and stiffness were checked by using the workbench software object nose and large tie rods. In addition, using Creo to export drawings of trunks and large rods.
Key Words: Gantry crane; elephant trunk; Creo; workbench
目录
第一章 绪论 1
1.1 港口发展 1
1.2 门座起重机概述 1
1.3 国内外发展现状 2
1.3.1 国内发展现状 2
1.3.2 国外发展现状 3
1.4 课题的主要研究内容 3
第二章 门座起重机臂架系统设计 3
2.1 货物水平位移 4
2.1.1 刚性四连杆组合臂架方案设计 4
2.1.2 组合臂架系统校验 7
2.2 臂架自重平衡 9
2.2.1 杠杆-活对重法臂架自重平衡系统设计 9
2.2.2 臂架平衡系统校验 9
第三章 象鼻梁及大拉杆结构的三维建模 12
3.1 Creo软件简介 12
3.2 建模思路 13
3.3 象鼻梁结构建模 13
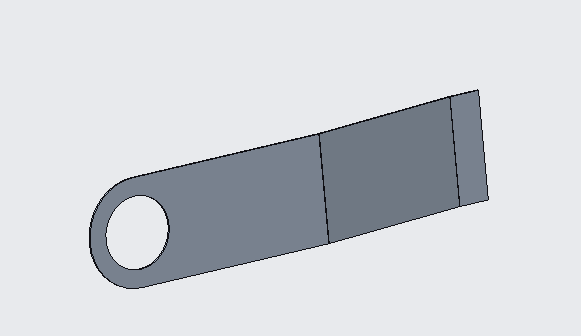
3.4 大拉杆结构建模 15
第四章 基于Workbench的强度及刚度校核 16
4.1 Workbench软件简介 16
4.2象鼻梁强度刚度校核 17
4.2.1 载荷计算 17
4.2.2 计算工况 20
4.2.3模型修改 21
4.2.4 模型导入 21
4.2.5 受力分析 21
4.3 大拉杆强度刚度校核 24
4.3.1 载荷计算 24
4.3.2 计算工况 25
4.3.3模型导入 25
4.3.4 受力分析 25
第五章 构造工程图 27
5.1 导出工程图 27
5.3 bom表及球标 27
5.2 图纸标注 27
第六章 经济性与环境影响分析 28
6.1 经济性分析 28
6.2 环境影响分析 28
第七章 总结 28
参考文献 30
致谢 31
第一章 绪论
1.1 港口发展
港口是水陆交通的集结点和枢纽,一直以来都对一个国家的经济发展有重大影响。特别是近年来随着经济全球化水平的不断提高,各国进出口贸易额不断攀升,港口的作用显得愈发重要。近年来我国不断加大对港口的投入,不断加快基础设施建设的步伐,港口行业取得迅猛发展。2017年,我国各大港口吞吐量都保持着上升趋势,宁波-舟山港、广州港、唐山港、日照港均保持着约10%的吞吐量增速;总吞吐量更是达到了116亿吨,集装箱货物总吞吐量2.2亿TEU。在此背景下,港口起重机械的设计与研究也愈发引起人们的重视。
1.2 门座起重机概述
门座起重机属于臂架型起重机,其臂架安装在门座上。凭借额定起重范围能力广、占地面积小、使用效率高等优点,广泛应用于各大件杂货码头,目前港口上常用的门座式起重机机型有:通用门座起重机、带斗门座起重机、多用途门座起重机等。门座起重机的工作机构有起升机构、运行机构、回转机构、变幅机构。其变幅机构通过使臂架摆动改变起重机幅度和起升高度,是门座起重机的主要工作机构。
门座起重机的变幅根据工作要求可以分为工作性变幅和非工作性变幅。本次设计的MQ4035型门座起重机为港口用起重机,其变幅过程中往往需要带载进行故其变幅机构是工作性变幅机构。对于工作性变幅,为减小变幅过程中由臂架自重和起升载荷势能变化引起的变幅阻力,常采用臂架自重平衡系统和货物升降补偿系统。
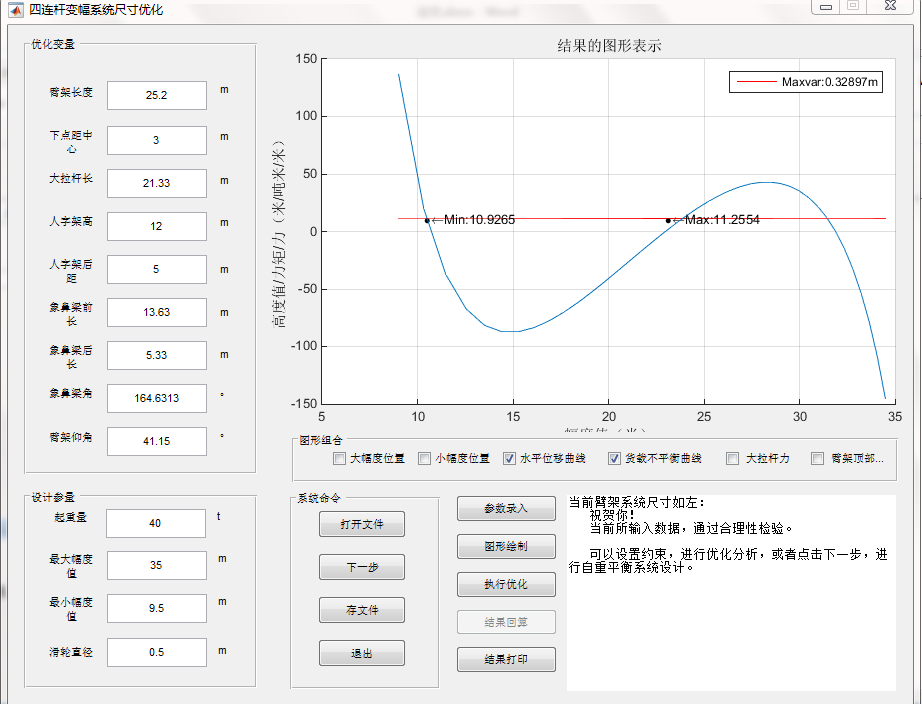
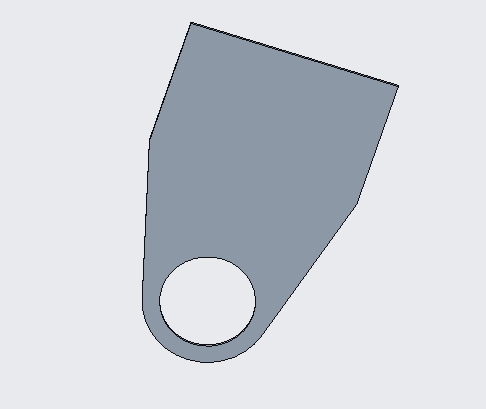
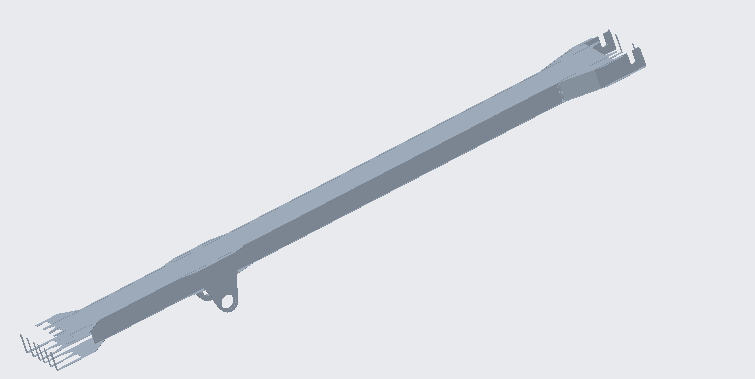
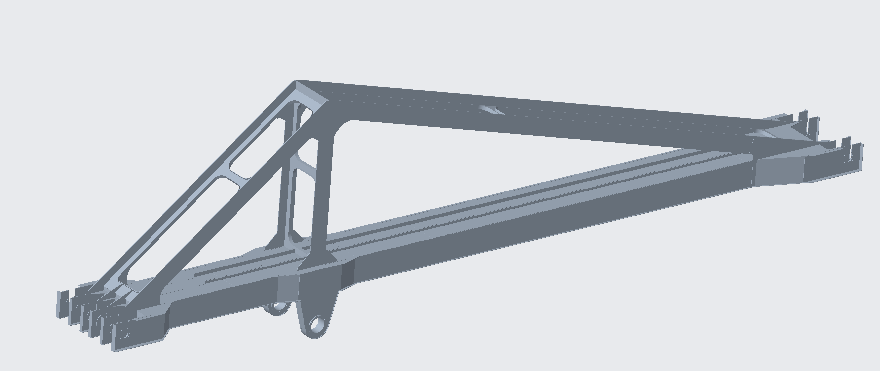
本次设计的主要对象为象鼻梁,象鼻梁常见的结构形式有两种:桁构式象鼻梁(图1.1)和箱型钢架式象鼻梁(图1.2)。桁构式象鼻梁由一根箱型主梁和一片或两片桁杆系统焊接而成,象鼻架与臂架相连的铰轴结构布置在主梁下方,与大拉杆相连的铰轴布置在象鼻架后方;箱型钢架式象鼻梁的底面是两根小箱形梁组成的平面钢架,上部桁杆用横杆相连,形成一个空间钢架体系,该结构有较好的空间刚性。本机采用的即为箱型钢架式象鼻梁。
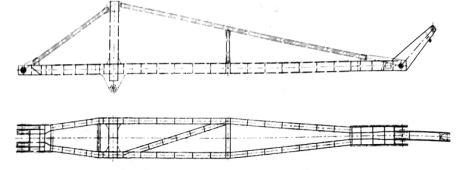
图1.1桁构式象鼻梁
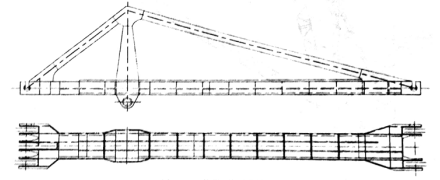
图1.2 箱型钢架式象鼻梁
1.3 国内外发展现状
1.3.1 国内发展现状
21世纪以来,我国港口建设持续保持快速稳定发展,有力地促进了我国港口机械技术水平的快速提高。在小吨位的起重机设计领域我国已经处于世界领先水平 ,但在大型起重机运输机械的设计研发领域我们和发达国家依然存在着巨大差距,特别是内燃机等核心部件的研究一直没有实现突破性的进展[8]。
目前对于象鼻梁结构设计的研究多采用有限元技、三维建模技术。例如武汉理工大学的陈昆、胡吉全[10]等人以传统力学方法确定象鼻梁各部分尺寸,然后以此尺寸数据为基础使用有限元分析软件ANSYS中的SHELL63单元对象鼻梁进行建模,并根据ANSYS软件计算所得的应力云图采取相应的措施对象鼻梁结构进行优化。
同样的胡静波,倪大进[11]利用有限元分析软件ANSYS对门座起重机关键构件象鼻梁进行建模并分析,进行了臂架系统位于最大幅度与最小幅度时象鼻梁的应力和位移计算,并据此计算结果对象鼻梁进行强度及刚度的校核。
1.3.2 国外发展现状
欧美发达国家工业革命较早工业历史悠久有着近百年的技术积累,拥有着内燃机等大量核心的技术,门座起重机等港口运输机械有着远超其他国家的持续发展。由于发展历史悠久现阶段其主要研究领域不再是基础结构设计而是集中在与计算机技术相结合的货物防摇,起重机整机抗震等方面而非传统的起重机结构设计。
日本物流搬运机械从20世纪70年代起进入高速发展,特别是以集装箱起重机械为代表的机种甚至超过了欧洲,达到世界先进水平[12]。但是在进入新世纪后,在经济危机的影响下港口物流搬运行业不再受到政府重视,从而开始走下坡路,起重机械技术也开始下滑。虽然在某些方面有所下滑但其仍旧掌握大量核心技术并具有很强的竞争力
1.4 课题的主要研究内容
本文的主要内容是:根据使用要求确定臂架系统的几何尺寸,构建大拉杆结构和象鼻梁结构的三维设计分析模型,在workbench中完成这些构件的强度、刚度分析,构造以上结构件在Creo中的工程图模板。具体工作如下:
(1)根据主要技术参数并参考同类型门座起重机利用作图法确定出臂架系统的几何尺寸,并利用Matlab和绘图法对其货物水平位移系统和自重平衡系统进行校验;
(2)根据《起重机设计手册》对四连杆象鼻梁进行设计;
(3)在Creo软件中对象鼻梁和大拉杆进行三维建模,并直接在Creo中导出其工程图纸;
(4)计算象鼻梁和大拉杆所受载荷并按照工况进行载荷组合,将三维模型导入workbench中添加约束施加载荷计算其应力应变校验强度和刚度;
(5)校验象鼻梁局部稳定性。
第二章 门座起重机臂架系统设计
2.1 货物水平位移
常用的补偿方案有滑轮组补偿和刚性拉杆组合臂架补偿。滑轮组补偿方案是在钢丝绳卷绕系统中额外增加了一个补偿用滑轮组以此抵消臂架摆动时吊钩位置的升降;刚性拉杆组合臂架由臂架、象鼻梁、大拉杆组成并与人字架构成平面四连杆机构,臂架摆动时象鼻梁端点运动轨迹为双叶曲线,在一定范围内为近似水平线。滑轮组补偿法结构简单,臂架自重小。但相较于刚性拉杆组合臂架法其起升绳长度较长且磨损严重,小幅度时物品悬挂长度长,摆动角度大,故常采用刚性拉杆组合臂架补偿方案。本机采用的即为刚性拉杆组合臂架方案。
2.1.1 刚性四连杆组合臂架方案设计
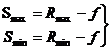
1)根据主要性能参数表中的的幅度要求Rmax=35m和Rmin=9.5m、轨上起升高度H=30m等条件,初步确定O点距离回转中心的距离f为3m(图2.1)。
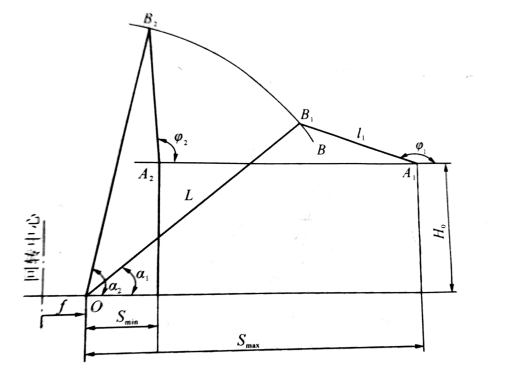
图2.1 确定L和l1长度简图
然后根据起升高度计算出O点到到象鼻梁端部滑轮中心的高度H0:
 (2.1)
(2.1)
式中 H——起重机轨面以上起升高度,H=30m;
H1——臂架下铰点距轨面的垂直高度,H1=24m;
H2——取物装置所需空间高度,H2=5.2m。
计算得H0=11.2m。
2)求解臂架长度L和象鼻梁前段长l1。
首先确定计算幅度,当起升滑轮组倍率mq=1时:
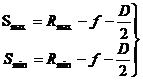 (2.2)
(2.2)
当起升滑轮组mq=2时:
 (2.3)
(2.3)
其中D为起升导向滑轮直径,D=1m。取mq=1,则Smax=31.5m, Smin=6m。然后根据象鼻梁端点在Smax和Smin时位于同一水平线,确定A1和A2点,求解L和l1。
初步确定Rmin时的φ2和α2角。φ2要满足Rmin时货物偏摆而钢丝绳不脱出滑轮槽为宜,通常取φ2=95°~102°,此处取φ2=95.65°;α2一般取为75°~82°,此处取α2=79。35°。沿φ2和α2角作象鼻梁和臂架轴线交于B2点,然后以 为半径作出臂架摆动弧线
为半径作出臂架摆动弧线 ,并以
,并以 为半径,A1为圆心作圆弧交弧线
为半径,A1为圆心作圆弧交弧线 于B1点,作出Rmax时臂架位置OB1和象鼻梁前段位置A1B1。利用CAD作图(图2.1)并测量得L=25200mm,l1=13632mm。一般要求α1为40°~50°,φ1为155°~170°,此时α1=41.15°,φ1=156.74°,符合要求。
于B1点,作出Rmax时臂架位置OB1和象鼻梁前段位置A1B1。利用CAD作图(图2.1)并测量得L=25200mm,l1=13632mm。一般要求α1为40°~50°,φ1为155°~170°,此时α1=41.15°,φ1=156.74°,符合要求。
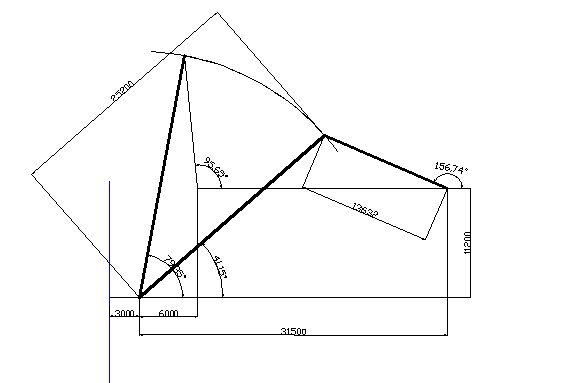
图2.2 L与l1长度确定实际绘制图
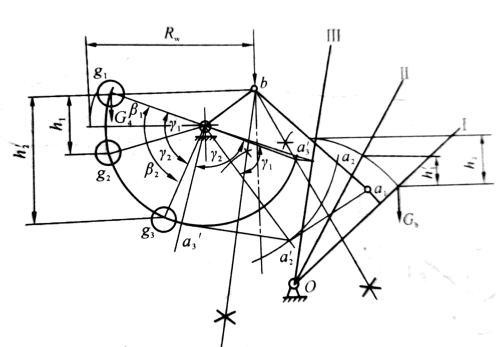
3)求解象鼻梁后段长l2和大拉杆长度l3。
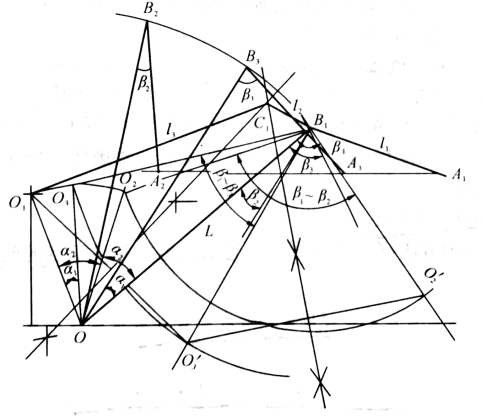
图2.3 确定l2和l3长度简图
为了直接反映总体布置要求,先确定O1相对于O的位置,经验取值:A=(0.1~0.3)L,B=(0.3~0.45)L。对于港口用门座起重机,由于尾部最大半径受限制,通常A最小值,取A=12m,B组大值,取B=5m。确定O1后,以A1、A2、A3都在同一水平线作三个位置的象鼻梁前段得B1、B2、B3(图2.3)。假设象鼻梁和大拉杆铰点O1之间的相对位置保持不变,将做最小和中间两幅度位置的象鼻梁前段反转与最大幅度的象鼻梁重合,这时点O2和O3也相应转动 和
和 角到了
角到了 和
和 。作
。作 和
和 的垂直平分线,其交点C1就是大拉杆与象鼻梁在最大幅度时的连接铰点。连接B1 C1和O1 C1便获得象鼻梁后段长l2和l3。利用CAD作图(图2.4)并测量得l2=5325mm,l3=21328mm。
的垂直平分线,其交点C1就是大拉杆与象鼻梁在最大幅度时的连接铰点。连接B1 C1和O1 C1便获得象鼻梁后段长l2和l3。利用CAD作图(图2.4)并测量得l2=5325mm,l3=21328mm。
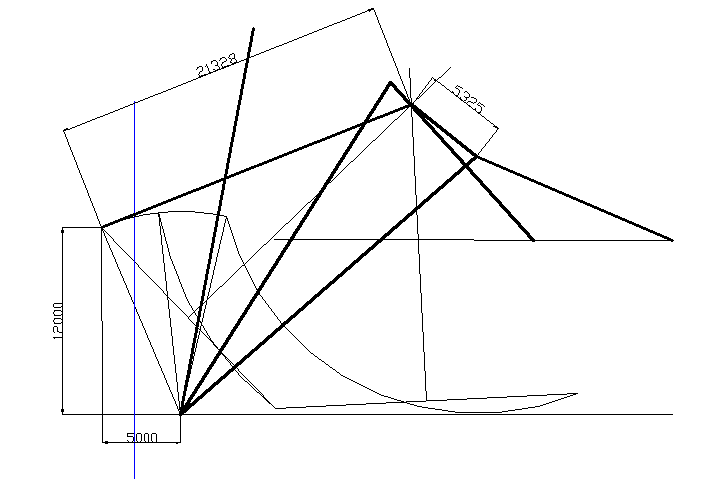
图2.4 l2与l3长度确定实际绘制图
2.1.2 组合臂架系统校验
根据作图法确定的臂架四连杆的尺寸需进行以下校验:
1)校验象鼻梁端点水平位移时的垂直方向的最大差值,最大差值 应满足:
应满足:
 (2.4)
(2.4)
式中 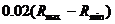 =0.51m。
=0.51m。
2)校验货物未平衡力矩,货物未平衡力矩的最大值应满足:
 (2.5)
(2.5)
式中 PQ——额定起升载荷,PQ=400000N;
计算得
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


