基于Creo平台的MQ4035门机人字架结构设计毕业论文
2020-04-09 14:13:54
摘 要
随着经济全球化的日益发展,不同国家之间的贸易关系越来越紧密。而我国作为进出口大国,而港口作为主要的进出口平台,其繁荣发展起到了很关键的作用,而决定港口繁荣程度的除了港口吞吐量之外,还有就是港口起重机的种类。数量和性能好坏,所以本文针对MQ4035门座式起重机来进行人字架结构的设计。
本文此次进行的整个设计过程是在Creo软件上进行建模,然后对模型进行受力分析之后将模型导入到ANSYS中的workbench中进行网格划分和力的加载,以此来分析模型的应力分布情况和变形程度,据此来对模型进行优化设计。最后再利用Creo软件将工程图导出。
关键词:门座式起重机,人字架结构,Creo
Abstract
With the increasing development of economic globalization, the trade relations between different countries have become more and more close. As a big country of import and export, and the port as the main import and export platform, its prosperity and development played a key role, and in addition to the port throughput, there are also the types of port cranes that determine the prosperity of the port. The quantity and performance are good and bad, so this paper designs the structure of the human frame for the MQ4035 gate crane.
The whole design process of this paper is to model on Creo software, and then introduce the model into the workbook in ANSYS for grid division and force loading, so as to analyze the stress distribution and deformation of the model. According to this, the model is optimized. Finally, the engineering drawings are exported using Creo software.
目录
第1章 绪论 1
1.1 门座式起重机简介 1
1.1.1 门座式起重机的分类及特点 1
1.1.2门座式起重机的结构 1
1.1.3门座式起重机的现状以及发展趋势 2
1.2 设计任务及设计要求 4
第2章 总体尺寸设计 5
2.1 性能参数 5
2.2 货物水平位移 6
2.2.1 货物水平位移原理 6
2.2.2 刚性四连杆臂架方案的设计 6
2.3 臂架自重平衡 9
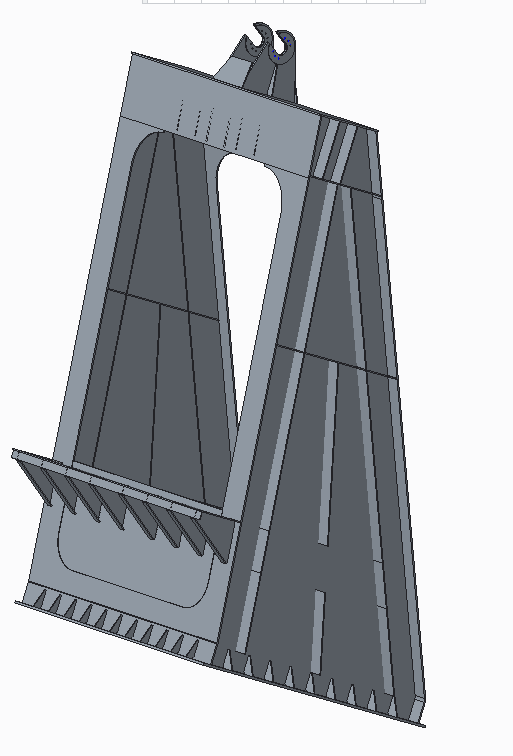
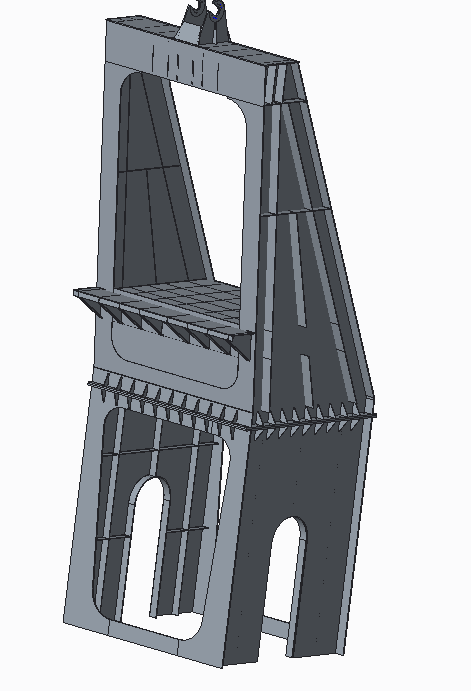
第3章人字架结构的三维建模 12
3.1 Creo软件简介 12
3.2 人字架结构建模 12
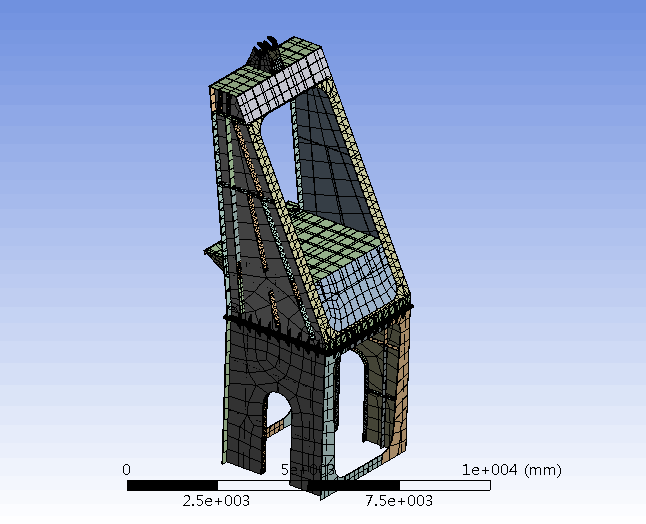
第4章 模型受力分析及优化设计 17
4.1 ANSYS软件简介 17
4.2 模型导入过程 17
4.3 受力分析过程 18
4.4 模型优化 22
第5章 工程图模板导出 25
5.1 Creo 导出图纸过程 25
5.2 图纸标注 25
第6章 环境影响及经济性分析 27
6.1 环境影响分析 27
6.2 经济性分析 27
第7章 总结与展望 28
参考文献 29
致谢 30
第1章 绪论
1.1 门座式起重机简介
1.1.1 门座式起重机的分类及特点
门座式起重机是一种桥架通过两侧支腿支承在地面轨道或地基上的,在地面上运行且下方可通过铁路车辆以及其他地面车辆,可转动的起升装置装在门型座架上的臂架型起重机。门型座架的4条腿构成4个“门洞”,可以让各种各样的地面车辆通过。门座式起重机大多依赖地面或建筑物表面的轨道上运行,进行装卸搬运作业。
门座式起重机在港口上的应用尤为明显,一个港口的发展程度是可以通过其门座式起重机的数量和种类呈现出来的[8]。
门座式起重机的种类按照用途可以分为三种,装卸用门座式起重机,造船用门座式起重机,建筑安装用门座式起重机。这三种的特点分别是:
- 装卸用门座式起重机:主要用于港口和露天推料场,用抓斗或者吊钩进行装卸作业。其特点是起重量很低,一般不超过25吨,不随幅度变化,且工作速度较高,是各大港口门座式起重机中的主力军。
- 造船用门座式起重机:主要用于船台、浮船坞和舣装现场,主要进行一些吊装工作。门座比较高大的,能够进行大幅度和大起重量的工作作业,但是工作速度相应地会较低,作业生产率不高。
- 建筑安装用门座式起重机:这一类的起重机多用在水电站进行大坝浇筑、设备和预支用品吊装等,也是用吊钩作为吊具。起升量和工作速度介于装卸用门座式起重机和造船用门座式起重机之间。它主要优点是整机的拆装和运输性能比较好、吊具下方深度大、对工作环境要求低等..。
1.1.2门座式起重机的结构
门座式起重机分为机构和结构两个部分:
机构部分总共有四个,分别是起升机构、回转机构、运行机构和变幅机构,这四种机构一般都同时参与运行[15]。转动部分上装有单臂架或组合臂架以及司机室。除了运行机构装在门架的下端,主要是为了改变工作的位置,起升机构、回转机构和变幅机构都安装在转台上。
门座式起重机的结构部分由门架、转台、人字架、大拉杆、小拉杆以及臂架等结构组成。其中门架、转台、人字架和臂架是主要的受力构件[4][5]。
门架结构:门架结构是整个起重机的核心部分,对整个起重机的运行起到了至关重要的作用,为了保证起重机的安全运行,对于门架结构的强度刚度要求相当之高,当然稳定性也是必不可少的。
转台结构:目前广泛使用平台的金属结构由两根纵向主梁和平板组成。根据受力情况以及大小,这些梁可做成箱型断面或工字型断面。人字架安装在转台上,臂架的两个下支承座也焊在平台的主梁端部。因此转台结构受力十分复杂,要求也比较高。
人字架结构:在门机中,臂架作为主要工作受力构件,除了自身刚度要求外,还需要人字架等结构来为其分担一部分压力,变幅机构的推杆、组合臂架的拉杆及其活对重等都与人字架相连。人字架支承在转台结构上。
除了这些主要的结构之外,有时为了满足各种各样的工作情况,可能需要在某些地方对起重机的结构进行更改,同时需要配备连续运输机等装置来提高工作效率和生产量。同时,为了确保安全,起重机必须配备电气保护装置以及负载限制器等安全装置,毕竟安全是生产的第一先决条件[13]。
1.1.3门座式起重机的现状以及发展趋势
1.1.3.1 国内门座式起重机的现状:
随着我国港口事业的快速发展,对于起重机设备的数量和质量要求也快速增加,国内各种起重机制造单位应运而起。单单在网上可以查到的起重机制造单位就有2000多家,从这一点就可以看出我国在起重机制造能力上具备了一定的能力,特别是在小吨位起重机的设计制造方面,我国已经处于世界领先地位。
提到国内的起重机事业单位,那就不得不提上海振华,1992年成立,从一无所有到现在能够在国际上的港口起重机制造行业里占据一席之地,并且拥有自己的核心技术,短短15年的时间,发展成现在这个样子不得不说是一个奇迹。这家公司从一开始只会模仿外国的起重机设备,到慢慢掌握核心技术成长为一家如此了不起的企业,不仅仅是每一个从事港口事业的骄傲,也是每一个中国人的骄傲,是国内港口生产制造单位的楷模。
尽管在短时间取得了如此大的成就,虽然已经在门座式起重机上有了很大的进步,但是还存在一些问题,主要表现在两个方面。第一,我国很多中小企业在设计研究,员工培训等方面的投资很少;第二,设计人员短缺,没有形成有效的设计理念,属于自己的知识产权相较于国外比较少,很多都是照着别人的来。尤其是在大吨位的门座式起重机设计研发制造上海于欧美等发达国家有一定的差距,在设计水平上急需提高,而且我国生产的门座式起重机在稳定性和可靠性上还与国外有很大的差距。
1.1.3.2 国外门座式起重机的现状:
相较于国内起重机制造单位的数量,国外厂家就比较少了,只有约45家,最具代表性的主要有欧美的利勃海尔、特雷克斯德马格、马尼托瓦和日本的神钢[14]。他们数量虽少,但是他们的产品型号完善,技术水平先进,具有很高的市场占有率。
欧美厂家生产的门座式起重机大致代表了国际先进水平。它不仅能满足大吨位的需要,而且结构稳定性和安全性能之高是其他国家难以望其项背的。值得关注的是他生产的大吨位门座式起重机上安装了全球定位系统,可以进行实时监控,具有广泛代表性。
1.1.3.3 门座式起重机的发展趋势:
随着现代物流行业的不断发展,各个国家之间货物的运输交流也越来越频繁,且计算机技术的发展也极大地推动了港口事业的发展,所以港口起重机械在起升重量、结构形式和自动化等方面是需要不断进步的,其发展趋势将主要体现在以下几个方面:
- 大型化和高效化。门座式起重机的作业范围和起升重量会越来越大。海港通用码头前沿装卸设备大型化的趋势日益明显,而 40t 大型门座式起重机已成为通用码头前沿的主力机型。时间就是金钱,这句话运用到港口装卸毫不为过,货物贸易越来越多,码头也越来越多,一个码头的吞吐量直接决定了一个码头的收益,所以对于门座式起重机的效率要求也越来越高。
- 创新设计:各行各业的发展都离不开创新,创新是一个企业的灵魂所在,港口也是如此,所以对门座式起重机传动形式、结构构造和功能原理等方面的创新理论及技术基础的研究刻不容缓。为此关于新能源、新材料的投入也不能忽视,从而通过对不同设计方案的比较,改进,不断推出创新设计成果。
- 核心技术化:为了提高市场占有率和国际上的影响力,对于核心技术和知识产权的把握也是至关重要的。
- 自动化和智能化:科技发展的趋势就是解放人的劳动力,目前已有很多工厂实现了智能化,无需配备很多工人在一线流水线上,在港口,依然如此。目前国际前沿对于智能港航的研究已经很长一段时间了,据说国内已有少数公司已经基本掌握了此项技术,未来能实现只需四五个人就能控制整个港口的运作。
- 节能化和环保化:发展的前提就是对于环境的保护,所以环保这一点是必须放在第一位的,环保型港口装卸搬运设备主要体现在节能降耗、减小粉尘和噪声排放、降低部件磨损等方面。我国对于环保及生态平衡的关注度越来越高,所以节能化和环保化是未来不可避免的发展方向。
1.2 设计任务及设计要求
主要设计门座式起重机人字架结构,要求如下:
- 根据使用要求确定人字架结构的几何尺寸;
- 构件人字架结构的三维设计分析模型;
- 在workbench中完成该构件的强度刚度分析;
- 构件该构件在Creo中的工程图模板。
第2章 总体尺寸设计
2.1 性能参数
性能参数件表2.1。
表2.1 主要性能参数表
项目名称 | 性能参数 |
起重量 | 40t(吊钩) |
工作幅度 | 最大幅度35m |
最小幅度9.5m | |
起升高度 | 轨上30m |
轨下18m | |
机构工作速度 | 起升机构:30m/min |
变幅机构:45m/min | |
回转机构:1.5r/min | |
运行机构:26m/min | |
机构工作级别 | 起升机构:M8 |
变幅机构:M7 | |
回转机构:M7 | |
运行机构:M4 | |
整机:A8 | |
基距/轨距 | 10.5m/10.5m |
工作状态最大风速 | 20m/s |
非工作状态最大风速 | 55m/s |
工作时最大轮压 | 250kN |
轨道型号 | QU80 |
电源 | 380V 50Hz |
2.2 货物水平位移
2.2.1 货物水平位移原理
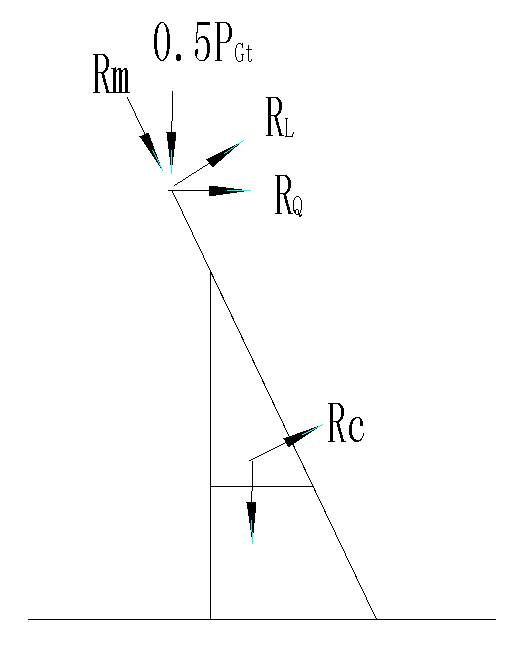
当货物在水平方向上匀速移动时,没有重力势能的变化,就能节省能量。为了节省能量,降低能耗,提高操作性能,实现使货物在变幅过程中沿近似懂水平痕迹且货物的未平衡力矩尽可能小,本设计采用刚性四连杆组合臂架方案的设计[11]。
2.2.2 刚性四连杆臂架方案的设计
(1)根据设计任务书给定的幅度要求Rmax和Rmin、起升高度H、总体布置等条件,初定臂架下铰点O的位置。
O点位置距回转中心的水平距离f的大小对整机性能影响较大,通常根据起重机的形式,总体布置要求取0.5-3mm。
然后根据起升高度计算出O点到象鼻梁端部滑轮中心的高度H0:
 (2.1)
(2.1)
式中 H——起重机柜面(或水面、地面)以上的高度;
H1——比价下铰点距轨面(或水平面、地面)的垂直高度;
H2——取物装置所需高度空间。
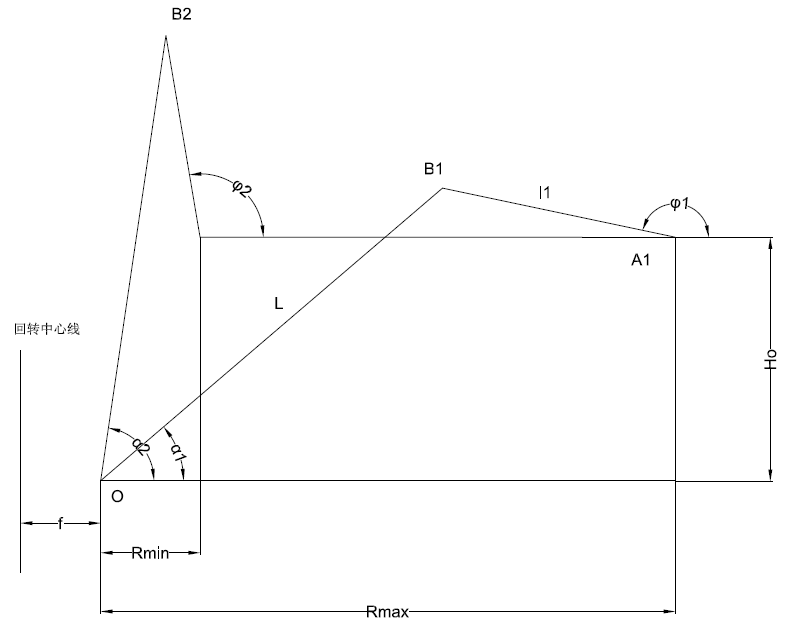
图2.1
(2)求解臂架长度L和象鼻梁前段长l1。
首先确定计算幅度,当起升滑轮组倍率mq=1时:
 (2.2)
(2.2)
 (2.3)
(2.3)
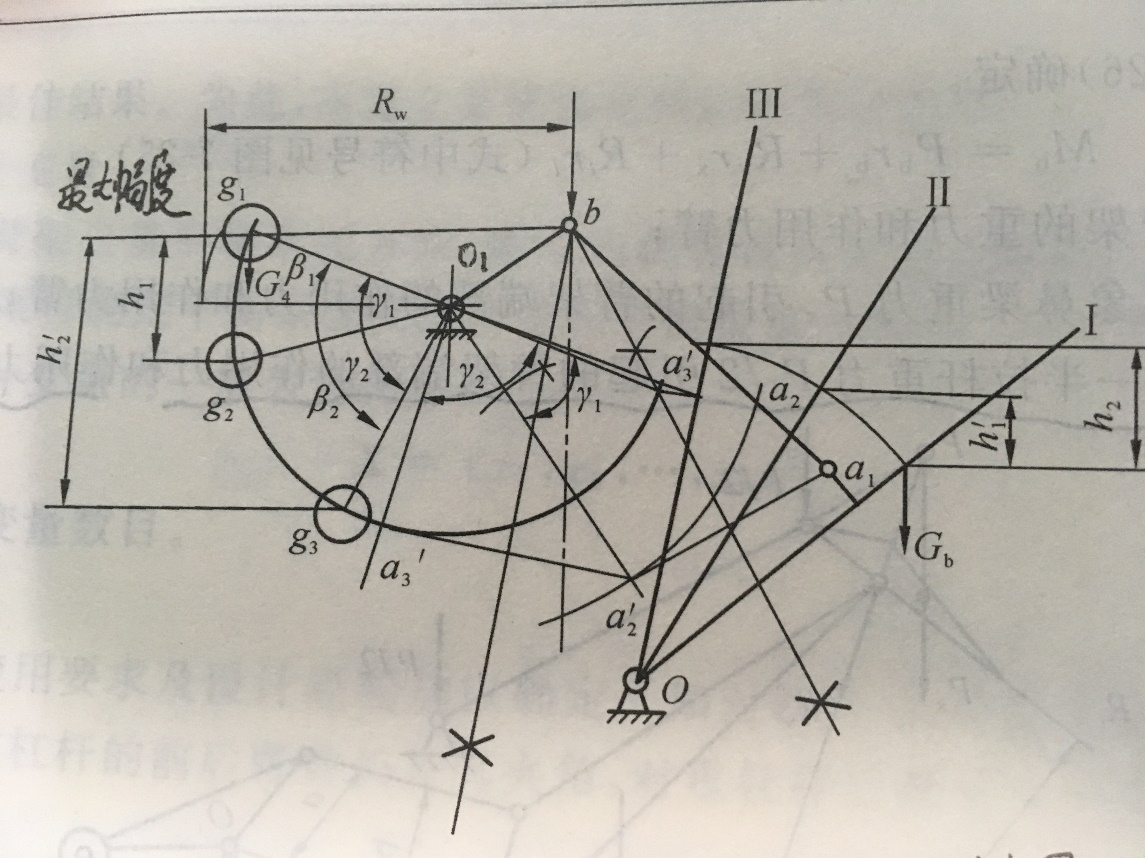
其中D为起升导向滑轮直径。然后根据象鼻梁断电在Rmax和Rmin时位于同一水平线条件,确定A1和A2点,求解L和l1。
初步确定Rmin时的φ2和α2角。通常取φ2=95°-102°,α2=75°-82°。然后用作图法可以得到α1和φ1,通常要求α1=40°-50°,φ1=155°到170°。如果不合适,重新调整数据再作图,直到获得满意的结果。求解时应注意控制臂架长度L和象鼻梁前段位置l1,L l1不宜太长[12]。
(3)求解象鼻梁后端长l2和大拉杆长度l3。
主要根据设计经验,先取l2=(0.3-0.5)l1。取定后,作最大、最小和中间三个幅度位置的象鼻梁图,其条件是作出的三个点必须在同一条水平线上。然后根据三个位置象鼻梁后端的三个点,做出一个过三点的圆,这样就得到了大拉杆下铰点的位置,这样就得到了象鼻梁后端的长度和大拉杆长度[1][2]。
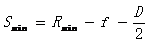
下图即是通过以上方法在CAD中得到的几何图形和各部分尺寸:
图2.2
(4)组合臂架系统的校验。
由于传统方法步骤比较繁琐且误差较大。本次校验只要利用了郭老师给的MATLAB里面的一个四连杆变幅系统尺寸优化的一个小程序,输入上面得到的尺寸数值就能进行检验,结果如下:
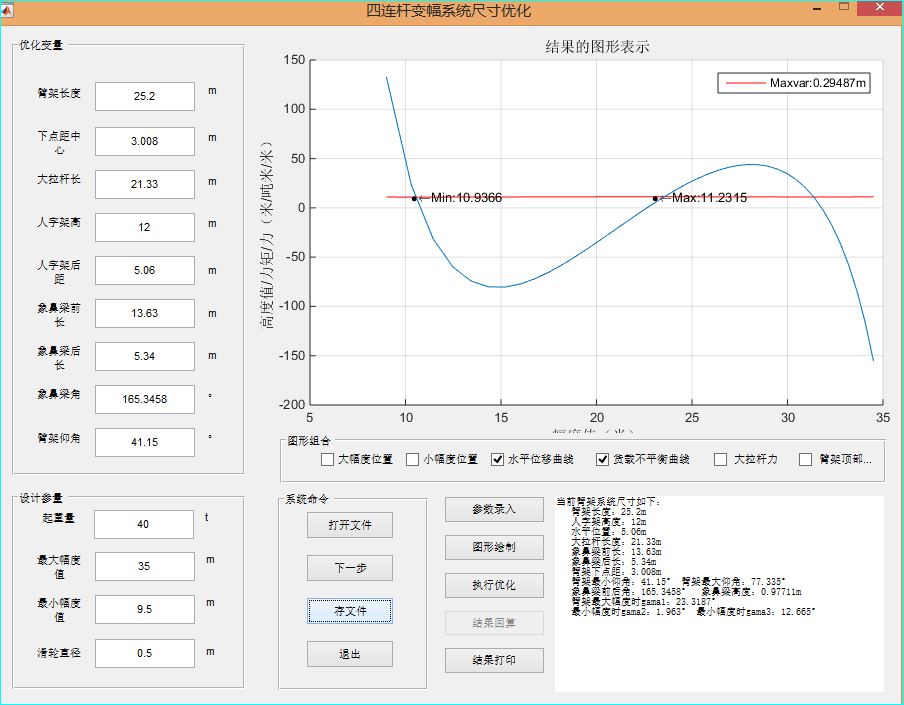
图2.3
经检验,上诉四连杆机构的尺寸满足要求。
2.3 臂架自重平衡
由于臂架型起重机存在着变幅过程,所以其重心的位置时刻会改变,这样以来会由于重心的升降和移动而产生不必要的做功以及变幅机构驱动功率的损耗。为了降低能耗,我们采用臂架自重平衡来使起臂架系统的重心能够在起重机变幅的过程中尽量不移动或者在一条近似水平线上进行移动[3]。
按照工作原理,臂架自重的平衡方法大致可分为不变重心平衡法、移动重心平衡法和无对重平衡法三大类。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


