机械手指的三维力传感器设计毕业论文
2020-04-09 15:44:22
摘 要
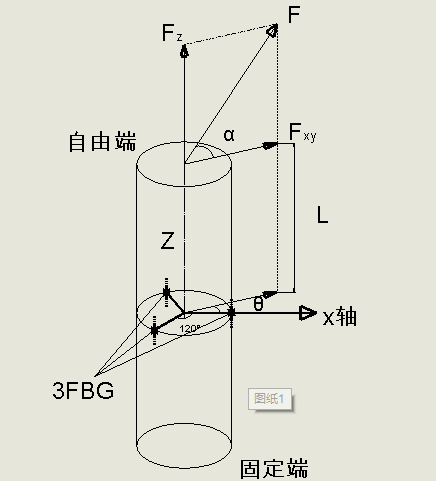
本文通过对机械手指的结构和工作原理加以分析,设计了基于光纤光栅传感技术的三维力传感器,该传感器基于圆筒结构,三个光纤布拉格光栅等角度布置在预先加工的凹槽内,应用工程力学的理论进行了传感原理的计算与分析,满足在三维空间测量任意方向力的要求。结合机械手指的应用实际需求,本设计选择两种性能相近又有差异的材料实际制作了传感器,并通过实验分析了三维力传感器的相关参数,对机械手指的力传感技术具有一定的借鉴意义。
论文主要研究了基于圆筒结构的光纤光栅三维力传感器的设计,并结合光纤光栅传感原理与工程力学的相关知识,给出了三维力传感器的计算公式,对传感器实物进行了测试,对设计的传感器的静态参数进行了实验标定。
本文从实际应用出发,采用理论与实验相结合的研究方法,从公式、实物两方面对设计的传感器进行了性能测试。该传感器结构轻便,可以在此基础上进一步增加力传动装置、力触觉传感装置,符合当前机械手的研究趋势,具有广泛的应用前景。
关键词:光纤光学;光纤光栅;三维力传感;机器人;
Abstract
This paper analyzes the structure and working principle of the mechanical finger, and designs a three-dimensional force sensor based on fiber grating sensing technology. The sensor is based on a cylindrical structure. Three fiber Bragg gratings are arranged at equal angles in the pre-processed grooves. The theory of engineering mechanics performs the calculation and analysis of the sensing principle and satisfies the requirements for measuring the force in any direction in three-dimensional space. Combining the practical requirements of the application of mechanical fingers, this design selects two materials with similar and different performances to actually make sensors, and analyzes the relevant parameters of three-dimensional force sensors through experiments, which has certain reference significance for the force sensing technology of mechanical fingers. .
The paper mainly studies the design of fiber grating three-dimensional force sensor based on cylindrical structure. Combined with the knowledge of fiber grating sensing and engineering mechanics, the calculation formula of three-dimensional force sensor is given. The sensor is tested and the design is performed. The static parameters of the sensor were experimentally calibrated.
This article starts from the practical application, adopts the research method combining the theory and the experiment, carries on the performance test to the design sensor from two aspects of the formula, the real object. The sensor structure is light and portable, and the force transmission device and the force tactile sensor device can be further added on this basis, which is in line with the current research trend of manipulators and has a wide application prospect.
Key Words:fiber optics;fiber Bragg grating; three-dimensional force sensing; robots
目录
第1章 绪论 1
1.1 设计任务与目的意义 1
1.2国内外研究概况 1
1.3问题分析与任务分析 4
1.4 拟采用的技术方案及措施 4
1.4.1 技术路线 4
1.4.2 设计方案及选择 5
第2章 光纤光栅及其传感原理 5
2.1 光纤Bragg光栅原理 6
2.2 光纤Bragg光栅应变传感原理 7
2.2.1受均匀轴向应力的传感模型: 7
2.2.2受均匀横向应力的传感模型: 8
2.3多维力传感器传感方式 8
2.4本章小结 9
第3章 三维力传感器结构设计 10
3.1 引言 10
3.2 机械手结构及原理 10
3.2.1 机械手的结构 10
3.2.2 机械手的设计步骤 12
3.3 传感器结构设计 13
3.4 理论模型 15
3.5 材料校核 18
第4章 实验测试与分析 19
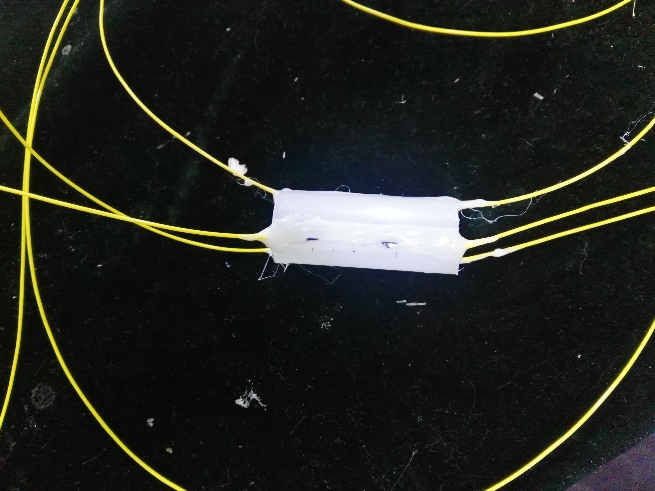
4.1 传感器加工及制作 19
4.2 实验测试 20
4.3数据处理 22
4.4 实验分析 25
4.5 本章小结 25
第5章 总结与展望 25
5.1 总结 25
5.2 展望 26
参考文献 27
实验数据记录 28
致 谢 30
第1章 绪论
1.1 设计任务与目的意义
本次毕业设计的主要内容是设计一种置于机械手指中的三维力传感器,要求查阅与参考压电、光纤等传感技术的基本方法,掌握机械手指基本的结构和工作原理,针对机械手指的结构,选择合适的传感原理,给出具体的实施方案,并进行传感器具体结构设计及其基本特性计算,最后制作出传感器实物并设计实验,完成对设计的传感器的测试与分析,最后根据设计工作完成内容进行毕业设计说明书的撰写。
机器人感知技术是机器人环境理解、智能决策与自主控制的基础与支撑,而力觉感知则是机器人感知的重要研究内容。多维力传感器、力触觉传感器能将机器人所处的环境作用力信息实时感知并反馈给控制系统或操控人员,是柔顺控制、力/位置控制、远程控制等技术的基础,对机器人的精准操控极为重要。当前,各类机器人的发展逐步兴起,如微创手术机器人、地震救援机器人、消防机器人等,它们或工作于核辐射、强电磁干扰、高温环境,或需进入人体、人体组织等特殊环境,这对机器人搭载的力传感器在特殊环境下的适用性、适应性提出了新的要求。
传统的机器人多维力传感器由于应变片数量多,导致多维力传感器体积大、安装不变,难以实现小型化。另外,由于维间耦合误差的影响,多维力测量的精度普遍较低。因此,在机械手指这样灵巧的结构上设计体积小、精度高的三维力传感器显得尤为重要,而这也会促进机械手方面研究的进一步发展,进而做出更贴合人手的仿生机械手指,使其在某些特殊环境下完成复杂精密的动作,对于工程应用具有积极的推动作用。
1.2国内外研究概况
现有的力传感器大都基于电阻应变计、压电等传统的敏感元件设计而成,这些敏感元件以弱电为传感信号,存在着信号易受电磁干扰、温度零漂、无法正常工作于大范围温度波动的环境、体积较大、难以与诸如微创手术机器人微小的手术臂融合等实际问题。与传统的传感技术相比,光纤光栅传感器具有结构轻便、耐腐蚀,抗电磁干扰等优势。
目前文献报道的多维力传感器以及市场上传感器产品中,电阻应变片原理型的传感器占据主导,自1989年光纤Bragg光栅技术逐渐为世人熟知后,FBG显著的技术优势引起了多维力检测领域研究者们的重视。
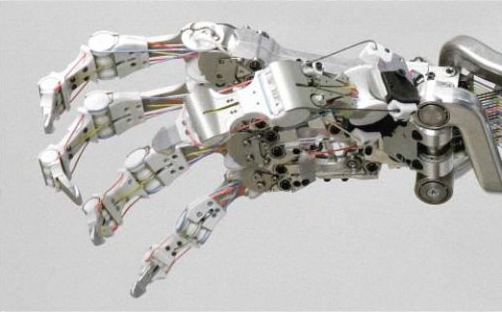
2007-2009年,斯坦福大学的Park等首次将FBG用在由复合材料制造的机器人仿生手指中,5个FBG嵌入到中空的工业机器人的手指结构内部,用于获取机器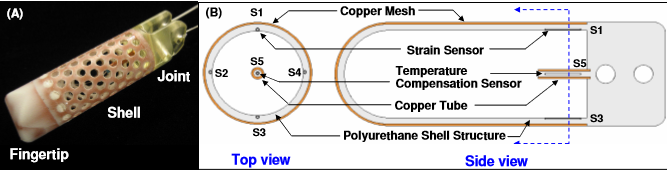 人抓取物体的作用力实时变化情况[1][1]。如下图所示。
人抓取物体的作用力实时变化情况[1][1]。如下图所示。
图1.1 二维指尖抓取力传感器
他们将4个FBG间隔嵌入到专门制造的网状弹性手指壳的内表面,2个间隔180。的FBG构成1个测量单元,2组测量单元即可检测手指受到的二维方向作用力,另外1个FBG置入手指中心的铜管内,处于自由状态,为其他4个光栅提供温度补偿。灵敏度、蠕变等性能的力学测试结果表明,该机器手指可分辨出0.1N的抓取力。
2011年,韩国科学技术学院(KAIST)的Song等利用FBG体积小、可消毒性良好等优势,研制了一种微创手术钳三维力/力矩测量系统,如图1.2所示,4支FBG粘贴在专门设计的4分梁结构上,同时设置4个温度补偿FBG,构成测力传感器,该传感器与手术钳并联串接,测量手术臂的3个互相垂直方向力的信息,测力分辨率可达0.05 N。
图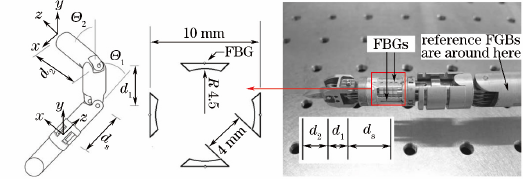 1.2 FBG三维力/力矩传感器
1.2 FBG三维力/力矩传感器
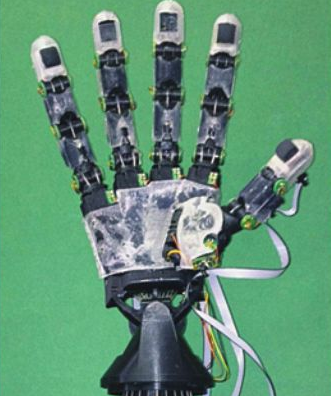
同期,德国慕尼黑工业大学的Mueller等设计了一种FBG六维力传感器。传感结构体和常见的斯图尔特平台相似,在同一根光纤上的6个FBG经拉紧后缠绕布置于传感体上的微型凹槽中,6个FBG沿传感体的周向间隔120°布置,分为3组,每组的2个FBG交叉布置。在外界6个方向上的力或力矩作用下,6个FBG的波长产生相应的漂移,但该传感体输出存在维间耦合,文中未对传感器做出各维力载荷实验和解耦输出分析[2]。其传感器的结构如图1.3所示。

图1.3 FBG六维力传感器
2009-2014年,约翰霍普金斯大学的He等一直研究能够用于视网膜微创手术机器人的高分辨率的力触觉传感技术。在此5年间,该研究小组将初始的单维力传感逐步发展到三维力传感,采取的传感原理即将单个或者多个FBG嵌入到手术探针内。在单维的力传感应用中,在探针端部植入一个FBG;二维测力传感时,沿探针周向间隔120°布置3个FBG,二维径向力作用下产生的应变分解作用在3个FBG上,再根据FBG的波长变化情况反演出2个方向上的力;三维测力时,在二维测力方法的基础上,在探针中心再增加一个测量轴向力的FBG。在实际手术测试中,对探针与人体组织作用力的测量表现出了良好的稳健性[3]。如图1.4所示。
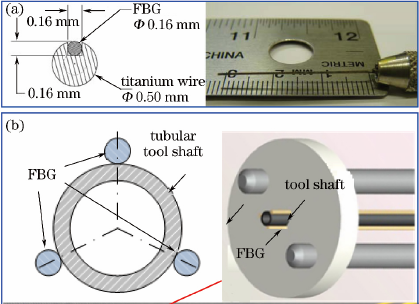
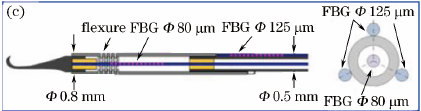
图1.4 视网膜手术探针FBG力传感技术
1.3问题分析与任务分析
光纤光栅是利用光纤的光敏特性在细微的光纤纤芯上建立周期性折射率分布,从而控制光在该区域的传播方式,是一种新型无源光器件。光纤光栅以光为传感信号,具备无电检测、不受电磁干扰、可耐高温、无零漂、精度高、体积微小、一根光纤可串接多个光栅等优势。考虑到光纤光栅传感的显著优势以及实验室的客观条件,本设计宜选用光纤光栅传感技术[4]。
在机器人的研究领域,机械手搭载的力传感器则更加偏向于小型化、高精度,而且要具备良好的性能,甚至能够在一定范围内的形变下正常工作,这对设计提出了更高的要求。同时,机械手指不仅需要测试出所受力的大小,还要根据受力的情况如受力位置以及受力分布作出相应的反馈,这就需要配置动力装置以及力触觉传感器,而这又反过来约束了测力传感器的设计,在设计时这些因素都需要考虑在内。
为了充分贴合人手的手指结构,设计的尺寸应尽可能地与手指尺寸相近,同时要便于布置光纤光栅,并对光纤光栅给予保护性封装。传感器的结构设计要方便施加外力,与受力物体有良好的接触,满足机械手指抓握以及夹取的要求。
1.4 拟采用的技术方案及措施
1.4.1 技术路线
本次设计采取的技术路线如下图所示。
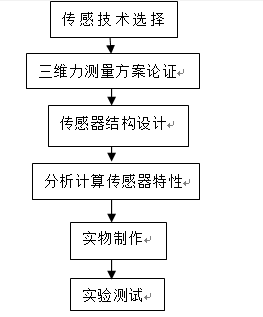
图1.5 技术路线
1.4.2 设计方案及选择
基于对本次设计任务的分析,主要有以下两种设计方案供选择:
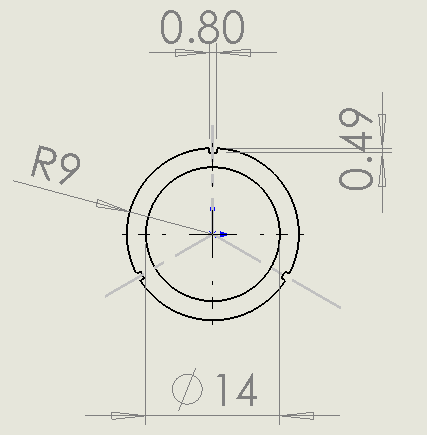
方案一:在35mm左右的空心圆筒上表面,沿周向间隔120°挖三个平行中心轴的浅槽,用来布置3个FBG,然后把光纤光栅套上保护线,三个FBG依次串联起来,一端与跳线连接,对圆筒表面的光纤光栅进行胶封。另外,在圆筒的上端卡上一个具备弹性的球体,两者间采用过盈配合的方式卡紧,这样设置是为了方便测量轴向力。
方案二:传感器结构由薄壁圆筒和薄壁圆台卷合而成,圆台底面半径与圆筒半径相同。沿圆台内表面周向间隔120°,粘贴3支光纤光栅。具体工艺实施时用符合设计要求的切割线把圆台和圆筒的组合展开成平面,从而得到该传感器结构的平面展开图,选用铝片薄板等可塑性强的材料,依据平面展开图对薄板进行线切割处理,并在提前确定好的光纤光栅位置贴片、走线,最后把剪裁好的的平面卷合起来,对合缝进行胶接或者焊接。
对比以上两种方案,第二种方案对材料的可塑性要求高,而良好的可塑性带来的是传感器的易形变及测力范围有限等问题。因为设计的传感器尺寸较小,没有专门的工具完成卷合这一工序,而单靠简单的手工操作会带来极大的误差,甚至会影响到传感器的外形。此外该方案对加工要求也很高,对平面进行切割后难免有工艺上的误差,在会给之后的卷合带来问题,在卷合后并不能保证合缝整齐,后续无论采用胶接还是焊接都势必会影响到结构及尺寸,因此这一方案技术难度较大,可行性不强。
相比较而言,第一种方案操作上的难度不高,也较为常规,传感器的各项参数也满足设计要求,对光纤光栅加以保护后可以弥补设计上的不足,因此选择第一种方案作为三维力传感器的设计方案。
第2章 光纤光栅及其传感原理
光纤光栅基本可分为4类:光纤布拉格光栅、啁啾光纤光栅、闪耀光纤光栅和长周期光纤光栅。作为最早发现和研究的光栅,光纤布拉格光栅广泛应用于光纤光栅传感领域。 光纤Bragg光栅不仅有: 易于光纤连接,损耗低,光谱特性好,可靠性高,作为传感元件,它还具有传统传感器的其他无与伦比的优势: 光纤光栅传感采用绝对波长信息检测,波长值不受光源功率波动影响,且单根光纤可串接多个不同波长的光栅[5]。 本设计采用的便是光纤Bragg光栅。
2.1 光纤Bragg光栅原理
光纤是包括芯和包层的圆柱电介质光波导。沿着光纤的轴向,芯的折射率被周期性地调制以形成衍射光栅,使得特定波长的光可被光栅反射。其他波长的光可以通过光栅传输,这被称为光纤光栅的中心波长[6]。光纤Bragg光栅的结构如图2.1所示。
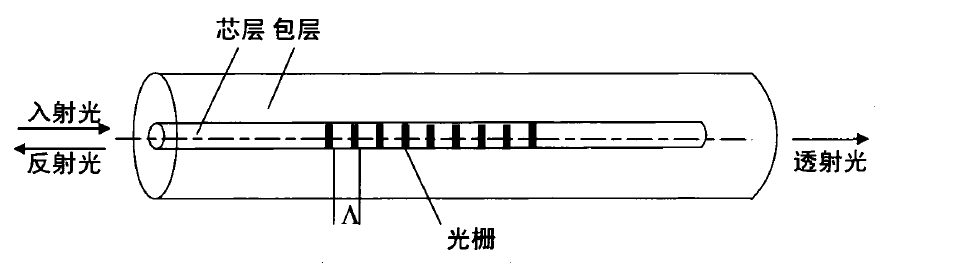
图2.1光纤Bragg光栅结构示意图
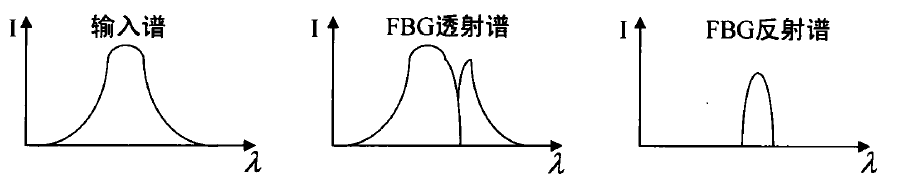 当光波通过光纤布拉格光栅时,满足布拉格条件的光波将被反射,从而入射光波矢量被分成两部分:透射光波矢和反射光波矢,如图2.2所示。
当光波通过光纤布拉格光栅时,满足布拉格条件的光波将被反射,从而入射光波矢量被分成两部分:透射光波矢和反射光波矢,如图2.2所示。
图2.2通过光纤光栅的光波能量分布示意图
根据光纤光栅的布拉格方程,中心波长可表示为
(0.1) |
在上述等式中,是FBG的中心波长,即是反射波的波长;为光栅周期;为光栅的有效折射率。
从公式2.1可以看出,光纤光栅的布拉格波长随着纤芯的有效折射率或光纤周期的变化而变化。因此,可以推断,只要外部因素可能导致这两个参数发生变化,那么外部因素就会引起布拉格波长的偏移。应变和温度在引起这两个参数变化的所有的外界因素中是主要因素。当外部应力或温度改变时,布拉格波长将相应地改变。FBG传感器的传感原理便是借助于光纤解调系统来检测FBG中心波长的变化。所需的物理量是通过波长变化量和波长偏移获得的[7][8]。
2.2 光纤Bragg光栅应变传感原理
如果FBG被拉伸或挤压,这将改变光栅的周期。如果温度保持不变并且光纤光栅仅受到轴向应变,则由光纤光栅的轴向应变引起的光纤布拉格波长变化可见公式2-4。
(0.2) |
在该公式中,是光纤光栅在应力下产生的弹性变形;为光纤的弹光效应。
2.2.1受均匀轴向应力的传感模型:
均匀的轴向应力使得光纤布拉格光栅纵向拉伸或压缩。基于广义胡克
定理,可以推出各个方向的应变为
(0.3) |
在上式中,E为光纤材料的弹性模量,为泊松比。计算各个方向的应变,得到光纤光栅的应变灵敏度系数。
将式2.2展开
(0.4) |
在该公式中,表示光纤在纵向上的伸缩量;表示光纤直径变化;表示弹光效应;为波导效应。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


