门机回转机构变幅调速电气系统设计毕业论文
2020-04-10 14:43:59
摘 要
随着我国经济高速的发展,各行业重点工程向大规模、专业化、高效率发展的要求也明显提高。作为港口运输业的重要组成部分,港口起重机的发展更是如此。因此港口起重机要有很好调速性能,让重机在作业时更加平稳、可靠,特别是起重机的零速转矩的能力,避免由于在低速时负载下滑而造成的安全事故。所以传统的港口起重机调速系统就很难满足现代港机作业的要求,变频调速是现在港口起重机调速系统的必然选择。本文从传统的门座式起重机电机转子串电阻的电气调速系统出发,通过分析其结构复杂, 控制精度低 ,生产率低、故障率高、能耗高等特点,设计了门座式起重机回转机构交流变频调速系统。
本文首先介绍了门座式起重机四大工作机构,然后,对变频调速系统与传统的调速系统做了对比分析;最后,重点讲解了门座式起重机回转机构变频调速系统的分析与设计。
关键词:门座式起重机;变频调速;PLC;
Abstract
With the rapid development of China's economy, the requirements for large-scale, specialized, and high-efficiency development of key projects in various industries have also been significantly improved. As an important part of the port transportation industry, the development of port cranes is even more so. Therefore, the port crane should have good speed adjustment performance, so that the heavy machine can be more stable and reliable during operation, especially the zero-speed torque capability of the crane, and avoid the safety accident caused by the load falling at low speed. Therefore, the traditional port crane speed control system is difficult to meet the requirements of modern port machinery operations, frequency conversion speed control is now an inevitable choice for the port crane speed control system. In this paper, starting from the electric speed governor system of traditional portal cranes, through the analysis of its complex structure, low control accuracy, low productivity, high failure rate, high energy consumption, the design of the portal crane slewing mechanism AC variable frequency speed control system.
Firstly, the paper introduces the four main mechanisms of the portal crane. Then, it makes a comparative analysis of the variable frequency speed control system and the traditional speed control system. Finally, it elaborates the design and implementation of the frequency conversion speed regulation system of the swing mechanism of the portal crane. And the designed system was simulated and debugged.
Key words: frequency control;portal crane;PLC
目 录
第1章 绪论 1
1.1设计的意义 1
1.2发展现状及趋势 1
1.3本文的主要内容 2
第2章 变频调速系统的原理 3
2.1交流异步电动机调速原理 3
2.2变频器 3
2.3变频器的控制方式 3
2.3.1 标量控制 3
2.3.2矢量控制 4
2.4 变频调速控制方式的选用 4
2.4.1v/f控制方式选择方法 4
2.4.2矢量控制和开闭环控制的选用 5
第3章 门座式起重机概述 6
3.1门座式起重机简介 6
3.2门座起重机的工作机构 7
3.2.1起升机构 7
3.2.2变幅机构 7
3.2.3运行机构 7
3.2.4回转机构 8
3.3门座起重机电气系统初步设计 8
第4章 门座起重机回转机构变频调速设计 9
4.1原MQ4035门座起重机回转机构电气系统 9
4.2 MQ4035门座起重机回转机构变频调速设计 9
4.2.1 变频调速的优点 9
4.2.2 变频调速系统的设计 10
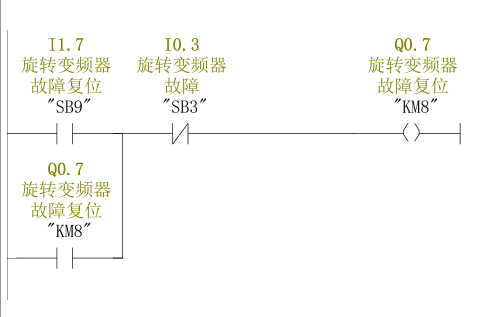
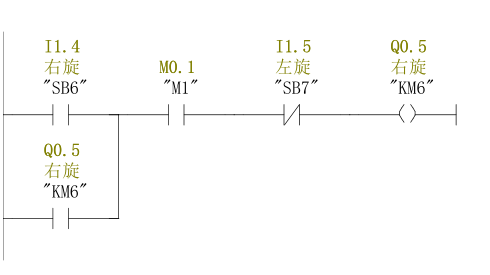
4.2.3 PLC控制系统的设计 13
第5章系统仿真分析 18
5.1安装step7 v5.6和step7-plcsim软件 18
5.1.1安装step7 v5.6 18
5.1.2 step7 v5.6的使用 18
5.2使用S7-PLCSIM软件进行系统仿真 19
5.2.1 S7-PLCSIM软件的安装 19
5.2.2 S7-PLCSIM的使用 19
第6章 经济分析 22
6.1电气材料 22
6.1.1电缆选型 22
6.2电气元件表及价格 22
第7章 总结 23
参考文献 24
致 谢 25
第1章 绪论
1.1设计的意义
门机的各机构电机均采用三相交流异步电动机,它具有结构简便、运行稳定、价格便宜、过载能力强和使用、安装、维护方便等方面优点。港机传统的调速方式中,交流异步电动机转子串电阻调速系统是港机各机构应用最多的。因为普通的起重机械对速度无过多要求,在港口起重上,这种调速系统也有应用,如传统的门座式起重机回转机构调速系统。但是随着行业的发展,港口起重机的工作性能必须优化升级特别是调速性能,让起重机在运行时更加平滑、可靠,特别是起重机的零速转矩的能力,避免由于在低速时负载下滑而造成的安全事故。所以变频调速是现在港口起重机调速系统的必然选择。
1.2发展现状及趋势
门座起重机为提高装卸的效率,各工作机构的调速性能要在间歇工作频繁的情况下,工作运行平稳,速度调节范围广,速度快。此外,门机的负载在下降或者减速的过程中,系统电动机都处于发电状态,如果这些再生电能可以反馈回电网,则可以实现节能,不过要注意所反馈交流电的频率。门式起重机电气调速系统历经直流发电机到电动机;从最初的晶闸管到直流电机调速方式再升级成异步电动机的多种调速方式例如,调压调速和变极调速等方式的发展过程。我们知道,由于直流特性,每台直流电动机都必须居有换向电刷,但是它维起来很麻烦并且价格高昂,特别是直流电动机容量很有限制。上述几种异步电机调速方式存在能耗大、可调节速度范围有限、功率因数低、无法在大功率下使用等缺点。交流异步电动机变频调速系统是目前已知道的交流电动机最为完善的调速方式,调速可在整个速度范围内连续的可控并且调速即平滑精度又高。恒转矩以及恒功率控制性能,对突然的负载变化具有出色的响应。系统功率因数近似为1.0,前级供电电源的配置要求低,谐波等电网危害小,机械性能指标远远好于其他调速方式。同时变频调速的精准可控,调速平滑和其稳定性较高正是港机各机构电动机调速的方向。目前,变频器已在港口机械行业中取得广泛认可[1]。目前正在制造的港口起重机几何都在使用变频调速控制。港口机械变频调速控制系统主要采用变频调速与PLC结合,实现了变频器在各种港机的各个机构的全面应用,取代了传统的电机转子串电阻调速系统,不光用于制造新的起重机,也应用于旧的起重机改造。由于控制技术和变频调速技术的飞速发展,其性能不断提高,人们必将大范围内改造传统的起重机械电气系统。同时,伴随着机械工业的发展,随着科技水平的提高等因素,变频器性能必将更加优化。
1.3本文的主要内容
论文首先对变频调速系统和传统的电动机转子串电阻调速系统做了对比分析。然后详细描述了门座式起重机回转机构变频调速系统的分析和设计,并通过仿真分析了设计的可行性。本文主要内容如下:
- 介绍门座起重机的四大结构。
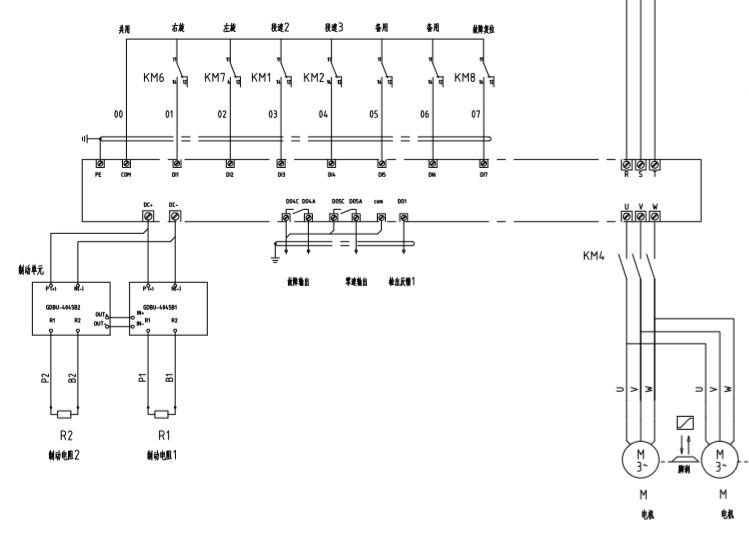
- 分析出变频调速的根本原理和一般交流电动机转子串电阻调速系统根本原理方法。设计了门座式起重机回转机构变频调速系统的主电路原理图。
- 确定变频调速系统各元件的选型。
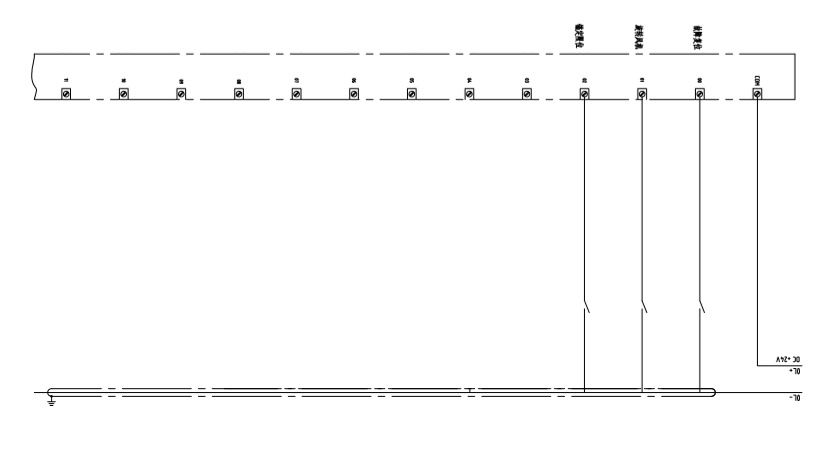
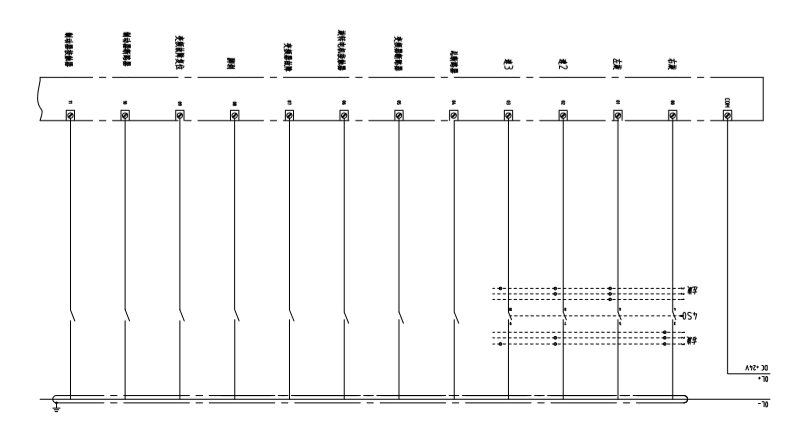
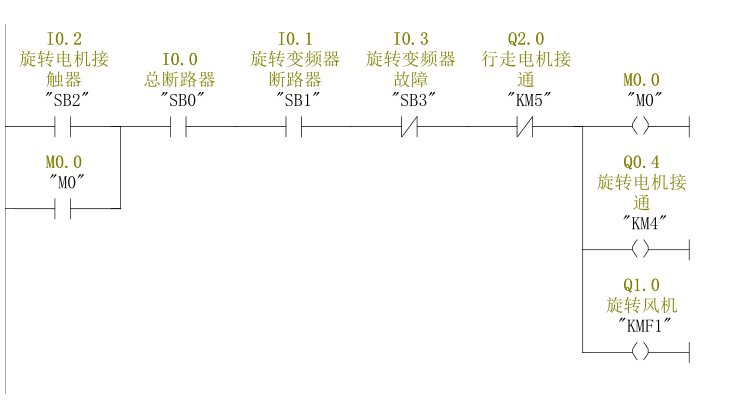
- 进行PLC系统软件设计。
- 利用step7软件进行系统仿真分析。
第2章 变频调速系统的原理
2.1交流异步电动机调速原理
异步电动机的转速表达式:
(2.1)
式中:f——定子电源频率(Hz);
s——异步电动机转差率;
p——磁极对数。
也就是说,改变电机定子电源频率可以改变其转速,但是由于三相交流异步电动机定子电压每相:
E=4.44fN⏀ (2.2)
式中:N——定子绕组有效匝数;
⏀——每极磁通量(Wb);
所以如果频率改变,每极磁通量就会改变,但转矩与磁通量成正比,要保证转矩不变就必须要保证磁通量不变,从2.2可以近似得出电机的电压U与频率f成正比,即U/f=常数。这相当于直流电动机的调速调节,也称作恒压频比控制方式。如果U不变,增加f会导致⏀下降,而⏀与转矩成正比,因此f增加可以减小转矩,即使转矩减小,增加f也会增加速度,即转矩和转速相乘功率不会改变。
2.2变频器
多年以来,一大批工程师们都在坚持不懈地针对交流电动机的调速存在问题,提出解决办法,电机调速在近四十年才有了突破性的发展,出现了一种用于交流异步电动机变频调速的装置,就是变频器,能够将频率恒定的交流电的变为一定范围内可控频率的交流电,因此,作为交流异步电动机的电源,让电动机的无级调速成为现实。
2.3变频器的控制方式
2.3.1 标量控制
同时控制变频器的电压与频率并控制电压与频率的比值,称作标量控制方式,也称v/f控制方式。最早大多数的变频器调节方式法都是电压和频率的比值为常数的控制方法。其原理是将电动机用作大型电感,并且恒定电压比可确保电流可以控制。因为仅仅关心电流的大小所以其控制结构较为简单,没有考虑电流方向,成本价格低廉,缺点很明显是系统性能不是很高。电机旋转速度v/f的控制方法无需反馈环节,不用安装速度传感器,其控制电路结构简单,负载可采用标准的交流异步电动机,因此通用性能较强,经济性较好。
2.3.2矢量控制
矢量控制的基本原理是测量和控制电动机定子电流,把电流分解成转矩和磁通两个不同方向上的分量。所以我们就可以分别控制转矩方向上的电流和控制磁通方向上的电流来控制转矩和控制磁通,这样的控制方式,电机转矩的变化速度非常快。所以使用矢量控制的电机稳定性好,控制性能优越。
不同于标量控制,矢量控制在控制电动机电流的大小同时,还能控制电机电流的方向。显然矢量控制要复杂的多,必须要进行大量的计算。由矢量控制的基本原理可知,进行矢量控制必须要知道电机的实时转速。电机的转速我们可以通过在电机上安装速度传感器获得,这就相当于在系统中加入了反馈环节也即闭环矢量控制。如果不引入速度传感器而是通过计算电动机的反电动势得到电动机转速,这种矢量控制是无速度矢量控制即开环矢量控制。
2.4 变频调速控制方式的选用
2.4.1v/f控制方式选择方法
(1)v/f控制的应用范围
通常采用v/f控制方式的通用型变频器,它的数字和模拟给定分辨率分别是0.01赫兹和0.04赫兹,最高输出的频率可以达到几百赫兹,能够用做标准交流异步电动机变频调速,变频功率变化范围是0.25kW到150kW。电源电压的在±15%范围内波动。主要用于没有更多动态指标要求的场合水,例如泵、电机风机和运输传动。如果不选恒定压频比特性曲线,还可以选择其它形式的控制曲线。例如我们可以选择变频器中转矩补偿设置曲线。只要符合实际机械负载情况的曲线,我们都可选用。
(2)反馈环节的选用方法
在标量控制中,我们并不需要知道电动机的转速,如果引入速度传感器,用处只是让我们知道电动机的实时速度,而对那些动态的指标要求不高的应用场合,例如,散热电机,简单机械的传动电机,宜选则标量控制。如果某些场合不要求很高的动态的指标,但是要求较高的转速精度,例如纺织业的调速控制系统,可选用高分辨率的开环控制。虽然有些动态指标要求不高,但要求很高的速度精度的情况,也可添加速度反馈。如果添加速度反馈环节,每台变频器只被允许控制一台电机。根本控制技术是标量的压频比控制方法,限制了变频器的动态特性,因此标量控制一般应用在开环控制的场合。
2.4.2矢量控制和开闭环控制的选用
通常采用矢量控制方式的变频器数字分辨率可高达0.001赫兹,即便不引入速度传感器其分辨率也能达到0.001赫兹。最高的输入频率可以达到650赫兹,变频器功率范围是2.2kW到1500kW。对电网的电压允许±15%波动,频率允许±6%内波动。主要应用在升降机,压力机等动态指标要求高的场合。
在选择矢量控制时,我们要特别注意,电机的极对数必须要与变频器说明书上所规定的极数完全相同;通过分析矢量控制方式的根本原理,如果想要达到使用矢量控制型变频器的目的,每台变频器只能够控制一台电动机;如果系统要求较高的动态性能,或者系统要求很高的电机转速精度,则还需要添加速度传感器,设计转速反馈环节。
第3章 门座式起重机概述
3.1门座式起重机简介
港口起重机的工作形式是周期性且间隙动作,按照它的结构形式可将其分为小型起重设备,臂架式起重机,桥式起重机等几种基本形式。通常用做港口起重机,主要分为门座起重机,桥式起重机,浮式起重机,轮式起重机。这类起重机都有四大工作机构为起升机构、运行机构、回转机构以及变幅机构。
门座式起重机通常用来起吊,下放和搬运集装箱,还可以让集装箱码头堆场内移动,所以门座式起重机在港口生产运输过程中起着至关重要的作用。起升机构,回转机构,行走机构,变幅机构是门座式起重机的四大工作机构。港口码头堆场内使用最多,最典型港口装卸机械就是门座式起重机,同时它的工作机构最多结构复杂且典型。使用最多的原因是它工作性能很好和金属结构优越,适应性强,所以其在港口杂货堆场也被广泛应用。
门座式起重机又被人们简称为门机,驱动方式为电力驱动,是能够有轨运行的臂架四联杆机构起重机。它有上下两大部分,上部是旋转起吊部分,下部是大车运行移动部分。上部的旋转起吊部分安装在门架旋转平台上,上部的旋转起吊部分相对于下部完全能够现360°旋转。下部门架不但是整个门座起重机的承重支撑部分,又是整个门座式起重机的运行部分。正是由于其特有的下部门形底座,门座式起重机名字由此而来。
门座式起重机的上部分为大拉杆,小拉杆,人字架,象鼻梁,旋转平台和司机室等结构,能够实现起升,回转,变幅动作。门架和大车运行机构组成了门座式起重机的下部。下部门架轨距现有3种,分类是按照能够并排通过几列火车为依据,若只能够通过一列火车的轨距宽度为6米,又被称作单线门架,如果只能让两列火车并排通过的轨距宽度为10.5米,又称作双线门架,同理三线门架的规矩宽度为16米。码头用门座式起重机多为双线门架。
门座式起重机的基本工作方式为:结合回转,变幅,起升三种工作机构的,能够让货物从一个位置搬运到另一个位置,并且中间能够跨越障碍物。同时还能够通过下部运行部分沿轨道运行来调整整台门机的位置,所以能够实现在较大范围内满足搬运码头货物。
3.2门座起重机的工作机构
3.2.1起升机构
门座式起重机必须凭借起升机构来升降货物。任何起重机都不能缺少起升机构,没有起升机构就不是起重机。起重的工作机构最重要的就是起升机构,尤为重要的是起升机构的性对整个起重机的性能起着决定性作用。
起升机构通常要有以下任务:
(1)使货物从地面上升或者把货物从高空中升降,能够与其他三大机构配合从而实现货物的搬运。
(2)机构可以以不同速度升降货物。
(3)能够让货物停留在起升范围内任意位置,即要在起升或者下降过程及时制动。
(4)如果电动机突然停电,货物能够静止在空中。
(5)当电动机突然通电,悬空的重物可以继续升降,并且恢复正常的工作状态。
起升机构是由以下装置组成:取物装置如抓斗,钢丝绳卷绕系统,电机,制动器和辅助装置,电动机输出端通过联轴器连接到减速器的高速轴。机构运行时,减速器的低速轴会驱动卷筒,将钢丝绳卷入或卷出,经过滑轮系统,升降吊具。当机构停止工作,制动器及时工作使吊具即货物能够在空中静止不动,电动机转向变换可使货物升降。
3.2.2变幅机构
用于改变起重机幅度的机构称为变幅机构,根据不同的工作要求,变幅机构的主要作用是:
(1)通过变幅从而改变吊具的工作位置,来调整起重机的起重能力,或者提高起重机非工作状态的通过性能。
(2)通过变幅从而扩展起重机的工作范围,能够和其它工作机构协同合作,来提升起重机的搬运生产效率,从而提升起重机的性能。
门座式起重机变幅机构有专门的驱动机构来改变臂架的角度,变幅机构的机构有多种传动形式,例如齿条式、液压式等形式。
3.2.3运行机构
港口搬运装卸作业过程中,因作业需要起重机通常都要可以调整自身的位置,以此就可以改变起重机的工作地点,从而扩大了起重机作业的面,进一步提高港口装卸生产效率。所以,港口起重机一般都会设有运行机构,让起重机做水平方向上移动是运行机构的根本任务。按照运行机构运行时有无轨道,可以分为有轨运行以及无轨运行机构两种。港口码头上通常用的门座式起重机运行机构都有铁轨,属于有轨运行机构。属于有轨运行机构的起重机可以在事先铺设的轨道上移动。虽然相对于无轨运行机构,有轨运行机构的运行会受到一些限制它只能在轨道上运行,但是,有轨运行机构运行时运行阻力相对较小,结构上更加紧凑,所以目前有轨运行机构是港机最为主要的运行方式。因为门座式起重机的运行机构是非工作状态的运行机构,仅仅用来改变起重机的工作场所。所以门座式起重机自重较轻,结构简便,运行速度也较低。
3.2.4回转机构
回转机构从工作机构作用来说有两个,一是承受门机上部一部分重量,二是使门机上部做回转运动。回转机构可以让在水平面被起重机吊起的货物,以回转中心做回转运动,从而达到搬运货物的目的。能够让起重机上部相对于下部做回转运动的动力装置是回转机构的驱动装置。回转驱动装置必须要满足起重机的左右回转动作,并且运行过程中要安全可靠,能够及时制动。考虑到回转机构受力的方面,以阻力矩回转机构必须要克服:回转装置中轴承的摩擦和回转接触面摩擦阻力矩,风阻力矩,由于轨道坡度施加给回转机构的回转阻力矩。
3.3门座起重机电气系统初步设计
采用先进的电控系统。起升机构,回转机构,变幅机构,运行机构都要用变频调速,变频调速的调速性能好,运行和制动快速且平稳。四大工作机构采用同一 PLC控制,特别注意的是PLC输入输出接口要留有余量,以方便维护和拓展。
必须要有齐全的安全保护装置,使系统工作时可靠安全。所以每个机构以及运动部件都必须要有限位保护,例如减速预限位,终点限位和极限限位等。并且电气系统通过各个限位开关和PLC要设计电气联锁。另外还应有力矩限制器在超载或者超力矩时加以保护。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


