无人船的探索与研究毕业论文
2020-04-10 16:02:22
摘 要
近年来,工业界与科学界越来越重视无人船舶的研究与应用。鉴于无人船舶在实际应用上不可估量的前景,尤其是随着电子信息技术、人工智能等技术的迅速发展,无人船舶的研究有了强而有力的技术支持,可以说无人船舶已成为未来船舶的主要发展方向。在不久的将来,无人船舶及其有可能会引发水路运输业的革命,彻底改变水路运输业的现状。
本文从无人船舶在感知、能效管理和自主控制领域出发,分析了现阶段无人船舶的研究在现阶段所取得的成果,以及所遇到的困难。同时分析了无人船舶在节能、安全方面的应用前景和技术难题。
关键词:无人船;研究现状;关键技术;应用前景
Abstract
Recently, the industry and the scientific community have paid increasingly attention to the research and application of unmanned ships. In view of the immeasurable prospects of unmanned ships in practical applications, especially with the rapid development of electronic information technology, artificial intelligence, the research of unmanned ships has a more solid support. It can be said that unmanned ships have become the prevailing direction of future ship development. In the near future, unmanned ships and their potential to trigger a revolution in the water transportation industry, will completely changes the status in this area.
This article starts from the field of perception, energy efficiency management and autonomous control of unmanned ships, and analyzes the achievements made by the research of unmanned ships at this stage and the difficulties encountered. At the same time, the application prospects and technical difficulties of unmanned ships in terms of energy saving and safety are analyzed.
Key words: unmanned ships; current research status; key technologies; application prospect
引言
远洋货运占据了全球贸易货运量的90%,其年市场规模高达3750亿美元。近十年来,波罗地海干散货指数(BDI)一直低位徘徊,造成大量航运企业运营举步维艰,降本增效是行业当下的核心诉求。在航运企业成本中,人力成本占据了较大比重。统计数字显示,一艘配员约10人的货船在远洋运输过程中,工资支出高达5000美元/天,占其总运营成本约44%。国际会计兼航运顾问公司Moore Stephen最新发布的航运调查报告显示,2014、2015年船舶运营成本上涨了3%,其中员工资和维修成本的节节攀升是主要因素。因此,减少船舶配员对于提升航运企业效益具有非常重要的现实意义。近些年,随着驾机一体化、无人机舱、辅助驾驶、故障自诊断等船舶自动化技术取得长足发展,远洋船员的具体事务正在逐步减少,仅需完成航线制定、紧急避让、机舱故障干预等工作。未来,船舶配员的进一步减少乃至实现“无人化”将成为航运业发展的重要趋势。
另一方面,全球碳排放交易机制、船舶能效设计指数(EEDI)和船舶营运能效指数(EEOI)正在有序推进,航运业减少温室气体排放已成为必然趋势。为此,2013年我国印发了《大气污染防治行动计划》,明确提出了要强化移动源污染防治。逐步严厉的排放要求,迫使船舶做出各种改进,进一步降低排放、提高效率。除了动力系统和船舶自身流线型的改进外,优化航线与航行模式、减少配员也是降低排放的有效手段。事实上,与船员生活相关的舱位,占据了运输船舶有效舱位的约三分之一。减少配员,甚至“无人”驾驶,将缩小甚至取消驾驶台、船员休息区、食品仓库等设施,进而将空出舱位用于载货,从而大幅度降低单位运输能耗。全球最大船舶设备供应商之一的英国罗-罗(劳斯莱斯)公司在其无人驾驶货船项目研究中指出,如果采用无人驾驶技术,一艘货船的运行效率将有望提高20%,同时减少20%的碳排放。
此外,“安全”也是远洋运输的核心诉求。服务于这一目标,远洋货船配备了多种感知、交互、求救工具。以万吨级远洋货船为例,其感知工具包括了两部以上的雷达、自动识别系统(AIS)、声纳;信息交互工具包括甚高频宽带(VDES)、甚高频对讲机(VHF)、各频段电台;求救工具包括搜救器(SART)、卫星应急示位标(EPRIB)等。然而,上述工具的配备与改进并没有彻底解决船舶安全问题,船舶碰撞、搁浅事故时有发生。原因在于,远洋航行过程中窗外场景几乎一成不变,极易造成驾驶员“视觉疲劳”。据统计,95%的船舶安全事故是人为因素造成。船舶“无人化”,也就意味着驾驶核心由“人脑”转移到“不知疲倦”的人工智能系统,“疲劳”问题也将不复存在。因此,“无人化”驾驶为解决安全问题开辟了新途径。
综上所述,基于航运企业经济效益、节能减排、航行安全的多重需求,发展远洋运输船舶的“无人化”具有重要的现实与科学意义。
行业应用现状
2007年,国际海事组织(IMO)倡导推行了“E航海”战略,其定义为:“通过电子的手段,收集、整合、交换、显示和分析船方和岸方海上信息,以加强泊位到泊位航行和相关服务,从而提高海上航行安全和安保能力,保护海上环境。”船舶信息集成度、交互水平大幅提高,突出体现在:1)以船舶信息综合显示系统(ECDIS)为核心的船舶数据集成系统已经开始普及;2)以驾机一体化系统为代表的“无人机舱”技术已经成熟;3)以AIS为基础、“船讯网”和“宝船网”为代表全球动态航行“大数据”系统已经建立。
2015年,罗-罗(劳斯莱斯)公司与芬兰Aalto大学合作启动了AAWA项目,计划用5-8年的时间设计建造一条无人驾驶的远洋运输船,使之拥有“远程驾驶”、“自主驾驶”的能力,如图1所示。

图a AAWA无人远洋运输货船项目概念图
我国是世界航运大国,然而,在远洋货船信息化技术、相关标准话语权上,我国与传统的航运强国,挪威、芬兰、瑞典、英国、乃至韩日,都有明显差距。深圳港作为世界第三大集装箱港,却并非传统的船舶工业中心,要在传统船舶工业领域实现突围难度很大。国内外航运业发展的现状表明:船舶“无人化”变革的核心并非船体、动力装置、导航系统本身的变化,而在于利用信息化手段提高船舶的“智能化”水平。深圳是全球电子信息设备的制造中心,拥有大批专注于电子信息、“人工智能”技术的高新企业、高校与科研机构;在这次船舶“无人化”浪潮中,拥有先天优势。以深圳市为基地,引领船舶“无人化”技术的发展,既是提升深圳船舶产业的需要,也是我国船舶工业在国际竞争中“弯道超车”的最佳时机。
国际上,无人船的研究最早见于军事领域。二次世界大战时期,美国海军就在无人艇上架设枪炮,通过远程操控实现远距离打击。此后,美国、以色列等国一直将无人艇作为军事武器在发展,出现了以“Spartan”为代表的一系列无人作战艇。英国普利茅斯大学等研究机构在自动导航、自动避碰、路径规划、运动控制等方面对无人艇开展了深入研究,并将无人艇的应用推向海洋探测。
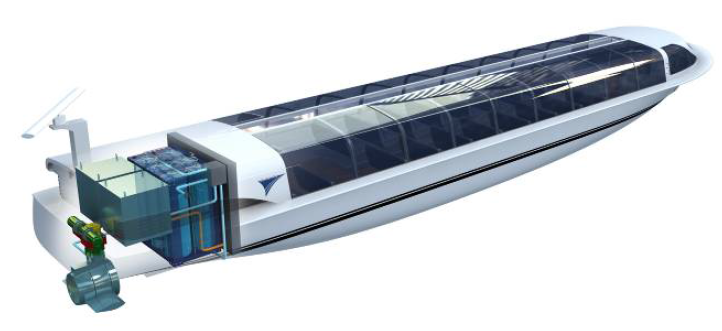
芬兰计划在2025年研发出第一艘彻底无人驾驶运输船。目前,已在芬兰设置了世界首个无人船测试场。挪威计划2020年建成首艘电力驱动无人集装箱货船YARA Birkland,预计造价2500万美元。


图b 芬兰无人驾驶运输船概念图
荷兰正在设计 24标箱内河电动船舶,采用岸基充电、可升降式驾驶台设计,用于阿姆斯特丹、鹿特丹、安特卫普航线,计划于 2019 年投入使用。未来拟建240标箱大型内河驳船,以替代目前的 135 m、500 TEU 内河集装箱船。
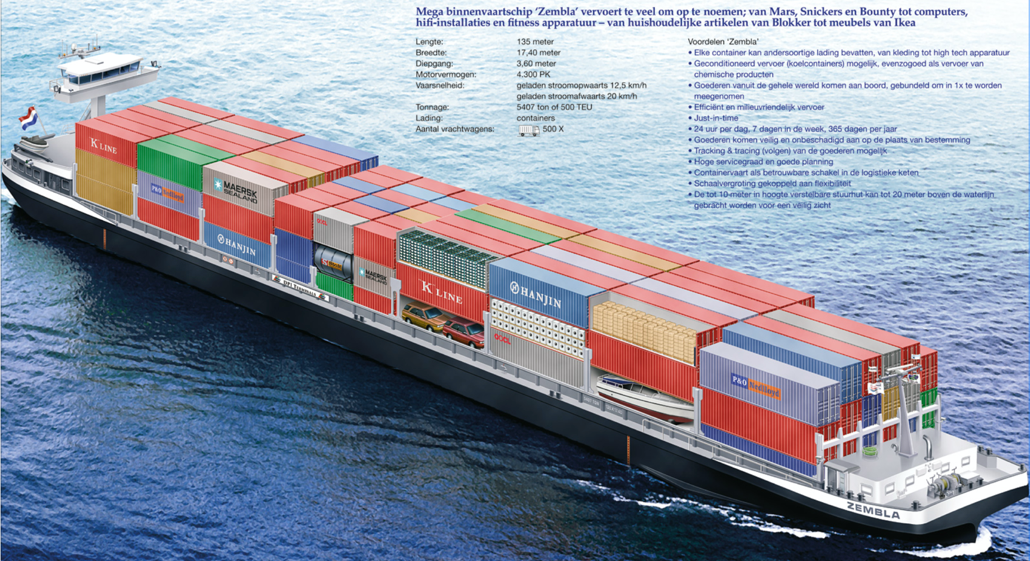
图c 荷兰内河电动船舶概念图
国内各研究机构近年来也纷纷开始研究无人艇。武汉理工大学和长江航道局武汉航道处共同研制了无人航道测量船,在长江航道监利航段用于航道水深、流速补测、工程测量等方面,表现良好。上海大学无人艇工程研究院研制的“精海”系列无人艇在中国南海岛礁、南极罗斯海等海域的勘测中取得了良好的效果。上海海事大学研发了“海腾 01”号等无人艇,努力拓展无人艇在海事管理中的应用。云洲智能科技(珠海、深圳)研发的无人艇系列产品,已经成功实现产业化、产品系列化,在测绘、环保、安防领域,都得到了广泛应用。云洲智能科技也在无人艇领域成为国内乃至世界上的引领企业。
2015年12月,中国船级社发布了《智能船舶规范》,是世界上第一部完整的智能船舶规范,明确了智能船舶在智能航行、智能船体、智能机舱、智能能效管理、智能货物管理、智能集成平台等方面的具体要求。建议成立智能船舶技术标准委员会,进一步细化技术要求及相应的标准细则。
2017年3月31日,“智能船舶测试技术创新联盟”第一次筹备会在武汉理工大学召开。上海船舶运输科学研究院、中国交通通信信息中心、中国船级社上海规范所、中国船级社武汉规范所、珠海云洲智能科技有限公司、武汉南华工业设备工程股份有限公司、武汉中原电子集团公司、武汉理工大学的17位与会代表就“智能船舶测试技术创新联盟”筹备的有关工作交换了意见。
船舶智能感知研究发展现状
典型感知设备介绍
雷达、AIS等常规船用感知设备是无人船的重要感知工具。由于自身的工作特性,雷达在近距离存在30米左右的探测盲区。AIS则存在先天设计缺陷,其报文中有时会出现错误。刘兴龙针对AIS的错误数据,开展了甄别研究。为了保证航行安全,除了AIS和雷达,很多无人船还配备了激光雷达、毫米波雷达等设备用于近距离感知的传感器。但是激光雷达角分辨率有限,造成其远距离成像不清晰;毫米波雷达也存在扫描范围不足的问题。视觉传感器也是无人船在环境感知中常用的设备,其算法相对成熟、安装简单、信息量大,一直是研究的热点。加州理工学院的 Michael T.等首先就如何通过摄像头实现无人智能船的 360度视觉展开了研究,并对目标实施追踪进行了探讨。为实现上述功能,他们提出了一种CARACaS(Control Architecture for Robotic Agent Command and Sensing)控制系统,展示了在不同环境下的视觉传感特征与目标追踪成果,证实了独立的视觉传感器即可获取大量的航行相关信息。从事相同研究项目的Terry Huntsberger等则从另外的角度,设计一种立体视觉的导航方式,并在港口等环境中予以了验证。然而,视觉传感器极易遭受雨、雪、雾等天气的影响;其返回的图片或者视频流,并不包含最重要的距离信息;多目视觉等技术虽然可以实现立体成像和距离度量,但离实用仍有距离。
由于各种传感器都存在缺陷,多数的无人船项目都采取了多传感器的组合感知方式。Larson等通过在无人船上安装视觉、毫米波雷达、激光雷达传感器实时感知船舶周围障碍物情况,再利用电子海图和 AIS作为辅助,使无人艇具备了由远及近全距离尺度的障碍物感知能力。Atul Thakur 等介绍了基于多种传感信息来如何制定无人船的运动控制策略。Les Elkins等介绍了美国AMN军用无人艇项目的全貌,它使用的传感器包括激光雷达、360度视觉、海事雷达等,使得其在开阔海面、港口等复杂应用领域都可实现良好的自导航、自控制特性。综合以上文献可以看出,多传感器信息融合是无人船感知的最佳技术途径。
关键技术介绍
- 无人船多传感器信息融合技术
信息融合技术是指组合和合并多个来源的信息或数据以便形成一个统一结果的技术。信息融合技术技术主要面临的问题与挑战,包括,数据的不确定性、数据的不精确性、数据的不一致性、数据的关联性、数据的相关性、数据的不同标度、数据的不同性质或形态、数据的不同粒度、数据的动态性、数据的处理量。无人船的多传感器信息融合,仍需面对诸多挑战。事实上,各大设备供应商,特别是ECDIS(电子海图显示终端)的制造商,已经在雷达、AIS信号的融合方面做了多方尝试,一些型号的雷达和ECDIS中都具备“AIS、雷达目标融合功能”。然而,雷达和AIS信号本身并不完善:雷达目标在密集航道内的虚假率高,一般达40%~50%;AIS目标则存在最长达180秒的延时。因此,上述“融合功能”只能在理想的环境下,比如开阔海域、目标船舶极端孤立的情况下发挥作用。要开发一个恰当的“信息融合智能”,服务于智能船舶,就必须使用一种可以处理上述“不确定性”、“延时”的信息融合、决策方法。
在该领域的主要方法有:证据理论、神经网络等。罗志增等则使用证据理论的方法,提出了多源信息的融合方法。证据理论模拟了人工判断过程,建立了多信息融合的基本框架;然而,基本证据框架存在一些明显瑕疵,比如怎样处理信息之间的冲突。为了改进证据理论在传感器信息融合上存在的冲突处理问题,近年来不少研究人员提出了不同的处理方法。Ma以 AIS 为研究对象,针对前后 AIS 信息之间的冲突,提出了基于证据相似的融合解决方案。在处理过程中,他提出使用人工修整因子的方法对传统的证据合成模型进行改进,拟合人工判断过程中的倾向性,在实地实验中取得了良好的效果。Jian-Bo Yang等研究人员,选择了一种全新的方法处理多信息源的冲突,称之为证据推理(Evidence Reasoning),即将整个标准证据推理作为一个过程元素,使用的是其推理结果的集合,而不是单一的结果,并提供了定性与定量信息的合成计算过程。同时,在推理的过程中,证据推理重视历史数据的积累,使之产生“学习”过程,从而影响最终结果。
- 深度学习理论
深度学习是机器学习的分支,是一种试图使用包含复杂结构或由多重非线性变换构成的多个处理层对数据进行高层抽象的算法。深度学习是机器学习中一种基于对数据进行表征学习的算法。观测值(例如一幅图像)可以使用多种方式来表示,如每个像素强度值的向量,或者更抽象地表示成一系列边、特定形状的区域等。而使用某些特定的表示方法更容易从实例中学习任务(例如,人脸识别或面部表情识别)。深度学习框架,尤其是基于人工神经网络的框架可以追溯到1980年福岛邦彦提出的新认知机,而人工神经网络的历史更为久远。1989年,扬·勒丘恩(Yann LeCun)等人开始将1974年提出的标准反向传播算法应用于深度神经网络,这一网络被用于手写邮政编码识别。尽管算法可以成功执行,但计算代价非常巨大,神经网路的训练时间达到了3天,因而无法投入实际使用。许多因素导致了这一缓慢的训练过程,其中一种是由于尔根·施密德胡伯的学生赛普·霍克赖特于1991年提出的梯度消失问题 。
最早的进行一般自然杂乱图像中自然物体识别的深度学习网络是翁巨扬(Juyang Weng)等在1991和1992发表的生长网(Cresceptron)[16][17][18]。它也是第一个提出了后来很多实验广泛采用的一个方法:现在称为最大汇集(max-pooling)以用于处理大物体的变形等问题。生长网不仅直接从杂乱自然场景中学习老师指定的一般物体,还用网络反向分析的方法把图像内被识别了的物体从背景图像中分割出来。
2007年前后,杰弗里·辛顿和鲁斯兰·萨拉赫丁诺夫(Ruslan Salakhutdinov)提出了一种在前馈神经网络中进行有效训练的算法。这一算法将网络中的每一层视为无监督的受限玻尔兹曼机,再使用有监督的反向传播算法进行调优。在此之前的1992年,在更为普遍的情形下,施密德胡伯也曾在递归神经网络上提出一种类似的训练方法,并在实验中证明这一训练方法能够有效提高有监督学习的执行速度。
自深度学习出现以来,它已成为很多领域,尤其是在计算机视觉和语音识别中,成为各种领先系统的一部分。在通用的用于检验的数据集,例如语音识别中的TIMIT和图像识别中的ImageNet, Cifar10上的实验证明,深度学习能够提高识别的精度。与此同时,神经网络也受到了其他更加简单归类模型的挑战,支持向量机等模型在20世纪90年代到21世纪初成为过流行的机器学习算法。
深度学习的好处是用非监督式或半监督式的特征学习和分层特征提取高效算法来替代手工获取特征。至今已有数种深度学习框架,如深度神经网络、卷积神经网络和深度置信网络和递归神经网络已被应用在计算机视觉、语音识别、自然语言处理、音频识别与生物信息学等领域并取得了极好的效果。深度学习的基础是机器学习中的分散表示(distributed representation)。分散表示假定观测值是由不同因子相互作用生成。在此基础上,深度学习进一步假定这一相互作用的过程可分为多个层次,代表对观测值的多层抽象。不同的层数和层的规模可用于不同程度的抽象。
深度学习运用了这分层次抽象的思想,更高层次的概念从低层次的概念学习得到。这一分层结构常常使用贪婪算法逐层构建而成,并从中选取有助于机器学习的更有效的特征。
不少深度学习算法都以无监督学习的形式出现,因而这些算法能被应用于其他算法无法企及的无标签数据,这一类数据比有标签数据更丰富,也更容易获得。这一点也为深度学习赢得了重要的优势。
船舶航行风险态势的感知
基于传感器的信息,船舶驾驶员的“人脑”可以对航行态势做出准确地预判,是远洋货船航行安全的重要保障。无人船在自主航行过程中,需具备类似于人工的航行态势预判能力。目前,基于人工智能评估“航行态势”的研究较少,其中较为代表性的工作有Ma。Ma在其研究中,利用人工势场中的斥力场模型描述航行态势中的风险分布;再根据船舶AIS历史轨迹与非线性优化方法,得到风险分布“斥力场”的具体参数;据此,推算出狭窄航道下的碰撞风险分布。
船舶智能控制研究发展现状
航行决策可靠性研究
随着海上交通密度的不断加大,船舶的航行安全越来越受到人们重视,对船舶航行决策及控制的要求也在不断地提高。一般来说,航行决策需要把感知、建模、规划、决策、行动等多种模块有机地结合起来,从而在一定环境中完成目标任务。而由于不可预测的船舶航行环境和特殊的船上工作环境,人为航行决策作为目前唯一的航行决策方式,人为决策失误的事故比例不断上升,其研究逐渐成为热点课题,在全球范围内引发越来越多的关注与担忧。船舶驾驶员处于特殊性的作业环境中,受到外部环境如极端天气、海况、航道、障碍物、船舶交通流和内部环境如狭小工作空间、枯燥的工作过程、单一的人员群体等影响,容易产生心理与生理问题,造成人为失误,直接影响到了船舶的航行安全。
对人为失误的多层次分析法基于瑞士奶酪模型(Swiss Cheese Model)的HFACS系统进行改进,建立了HFACS-Coll模型;人为因素分为几个方面[8]:疲劳、压力、情绪、健康问题、环境意识、团队合作、决策与认知需求、通信、语言与文化多样性。其中,情绪研究是人为因素研究的重要内容。而目前对于对船舶驾驶人员情绪的研究相对较少,方法仍停留在问卷和量化表格的阶段。
船舶自动控制方法
船舶自动控制的研究可追溯至20世纪20年代,至今经历了PID控制、自适应控制、智能控制等多个发展阶段。人们一直在研究能够完全替代驾驶员操控船舶的运动控制器。虽然船舶的运动控制通常只需考虑横向、纵向和首摇三个自由度的平面运动,但由于船舶运动系统的复杂性以及受到外界干扰、自身模型参数确定等影响,使船舶运动控制成为了一个十分复杂的控制问题。根据本项目选题的相关性,即着力解决面向远洋的无人船控制关键技术问题,下面分别从船舶路径跟踪控制和切换控制两个方面分析国内外相关研究进展。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


