基于声传感的自动泊车系统设计毕业论文
2020-04-10 16:12:10
摘 要
自动泊车系统能够自动将车辆停在狭窄的车位中,有助于减轻驾驶员的压力,在未来的智能汽车领域有着良好的发展前景。
本文利用声传感技术,基于单片机的控制设计了一种可以自动寻找车位的自动泊车系统。本文的主要内容如下:(1) 分析了国内外对自动泊车技术的研究现状,结合实际提出了符合要求并且可以实现的系统框架;(2) 分析系统需求并结合可利用资源确定了合理的系统搭建方案;(3) 根据方案选择合适的零件并完成组装,成功搭建出硬件系统;(4) 编写程序,使各个硬件模块协调工作,对整个系统进行调试,实现了系统要求的功能。
系统的实验结果表明,本文系统可以实现自动寻找车位并自动泊车的功能,有利于以后自动驾驶技术的研究。
关键词:声传感;单片机;自动泊车;寻找车位
Abstract
The automatic parking system can automatically park the vehicle in a narrow parking space, which helps reduce the pressure on the driver and has a good development prospect in the field of smart cars.
This paper uses acoustic sensing technology to design an automatic parking system that can automatically search for parking spaces. The main contents are as follows: (1) Analyzed the research status of automatic parking technology at home and abroad, combined with the actual system framework that meets the requirements and can be achieved.;(2) Analyze the system requirements and combine with the available resources to determine a reasonable system construction plan; (3) According to the plan, select the appropriate parts and complete the assembly, successfully build a hardware system; (4) Write programs to coordinate the work of various hardware modules, debug the entire system, and implement the functions required by the system.
The experimental results of the system show that the system can realize the function of searching for parking spaces and parking automatically, which is beneficial to the research of automatic driving technology in the future.
Keywords: acoustic sensing; automatic parking; search for parking spaces.
目录
第1章 绪论 1
1.1 研究的目的与意义 1
1.2 自动泊车技术研究现状 2
1.3 自动泊车技术的发展历史 3
1.4 本章小结 4
第2章 系统方案设计 5
2.1 整体系统设计 5
2.2 数据采集系统设计 5
2.3 中央处理器选择 6
2.4 其它模块设计 7
2.5 本章小结 7
第3章 系统硬件设计 8
3.1 传感器电路设计 8
3.2 单片机外围电路设计 9
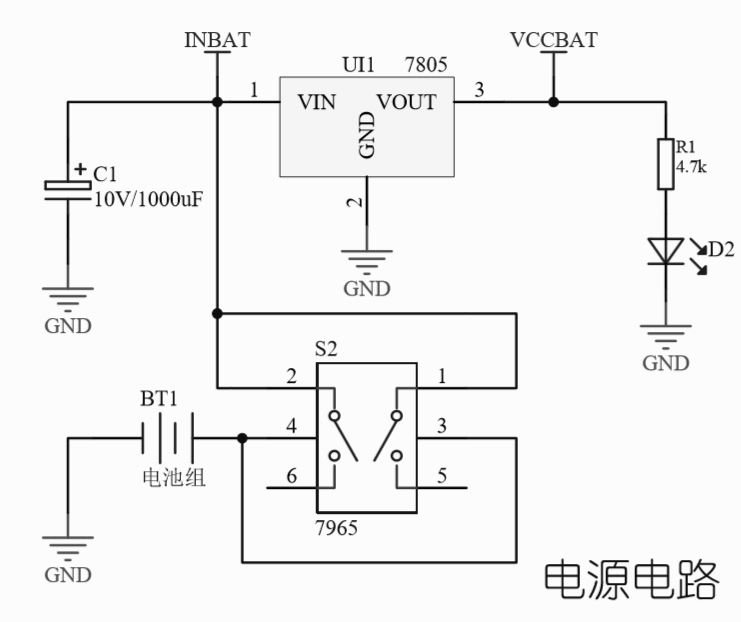
3.2.1 电源电路 9
3.2.2 按键及红外接收电路 10
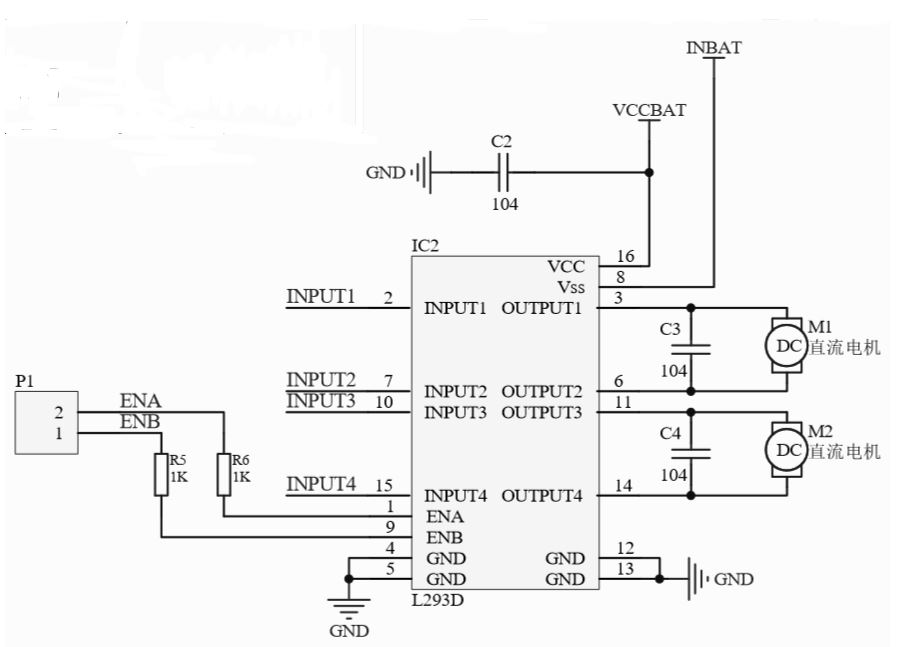
3.3 小车电机电路的设计 10
3.4 本章小结 12
第4章 系统软件设计 13
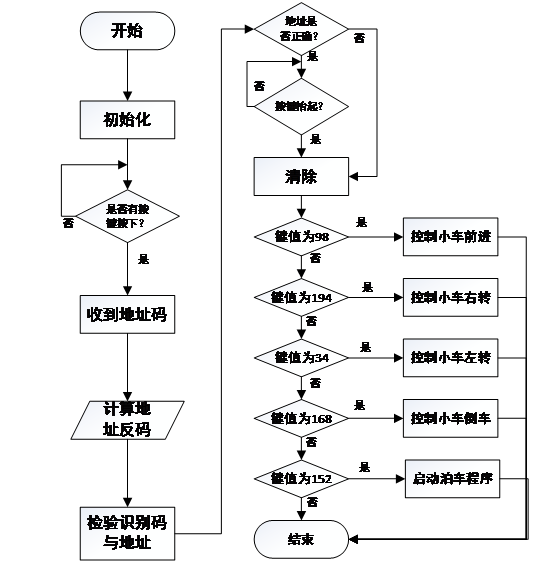
4.1 红外遥控 13
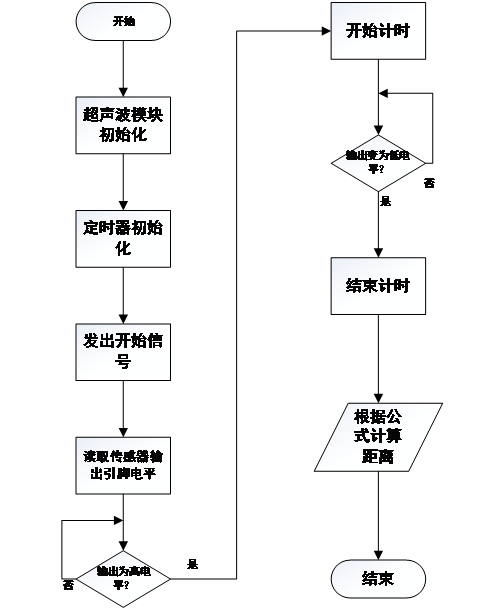
4.2 超声波测距 14
4.3 泊车程序 15
4.4 本章小结 17
第5章 实验与数据分析 18
5.1 实验结果 18
5.2 结果分析 19
5.3 本章小结 19
第6章 总结与展望 20
参考文献 21
致谢 22
附录A 开发版原理图 23
附录B 电路转接板原理图 24
附录C 程序代码 25
第1章 绪论
1.1 研究的目的与意义
随着社会的发展,汽车在人们的日常出行中发挥着越来越重要的作用。尤其是在最近几年,得利于经济的快速发展,汽车数量迎来了爆炸性的增长,在方便了人们日常出行的同时也使得马路、街道、停车库等原本就空间有限的场所变得更加拥挤不堪。另一方面,虽然我国的驾校行业正在一步一步走向正规化,但是现阶段的考规不完善再加上全国各地驾校林立也使得驾驶证获取的门槛比较低,而且驾驶汽车似乎也成了现代社会生活中的一项必备技能,所以每年都会有大量的人员考取驾照。但是获得驾照并不代表会开车,由于很多新手司机缺乏经验,有时候在遇到问题时并不能及时做出正确的反应,从而增加了交通事故的发生概率。
在整个驾驶环节中,复杂的泊车入位的过程会导致驾驶员完全无法享受驾驶的乐趣。驾驶员在倒车的过程中不光要全神贯注地对方向盘进行一次又一次的调整以确保车辆安全、快速的进入车位,并且还要每时每刻分出精力去留意车辆四周的状况以避免与周围的障碍物和来往的车辆与行人发生碰撞事故,这一系列操作对驾驶员的驾驶熟练程度、驾驶经验以及遇到紧急情况做出反应的最短时间都是一场不小的考验。而且在倒车过程中,驾驶员无法直接看到车后的情况,往往只能通过汽车配备的后视镜来确定车辆后方的具体状况,这使得驾驶员观察的情况不如直接通过人眼观察的直观,需要一个转换过程,从而增加了驾驶员的反应时间。虽然如今新生产的汽车一般都开始装备倒车辅助影像了,但是倒车影像都会有或多或少的畸变,也会影响驾驶员的判断。在泊车过程中,由于驾驶员的精神的一直处在高度集中的状态,所以驾驶员在泊车过程中非常容易神经疲惫,而且一旦有操作不当就有可能损坏车辆甚至引起交通阻塞。
随着智能化时代的到来,人们已经越来越习惯于将事情交给计算机处理,而且随着微处理器以及各种传感器技术的发展和成熟,研发出一种可以解决泊车操作难度过大的问题同时还可以提升汽车驾驶的安全性的自动泊车辅助系统的时机已经成熟[1]。首先,现在的很多传感器都可以代替人类的某些感观系统来对外界进行感知,而且有的传感器要比人类的系统更加灵敏也更加可靠,所以可以通过在汽车周围加装各种传感器来代替人类对外界情况进行探测,避免驾驶员视野盲区的产生;其次如今的计算机技术可以让计算机非常轻松的对数据进行处理与分析而且处理速度要比人类的反应速度快得多,所以可以直接利用计算机系统控制汽车的动作以取代驾驶员对方向盘的手动操作,减去驾驶员压力的同时还能在泊车过程中为驾驶员提供更高的容错率。
同时,发展自动泊车技术除了可以解决泊车难的问题外还可以解决在人口密集的城市的车位设计问题和交通问题。因为中国人口众多而且人们都在尽力往大城市中发展,导致大城市人口压力大,空间资源稀缺,为了节约空间,很多房地产开发商都将车位设计的相对较小,虽然节省了一点空间,但是本来就不简单泊车过程在狭小的空间的限制下就变得更加考验技术了,所以在繁华的市区中泊车便成为了让很多技术不够熟练的司机很头疼的事情。然而自动泊车技术就是为了解决这种问题而出现的,可以通过探测车位的环境,然后依据车辆和车位之间状况的不同选择出一条没有障碍的泊车路线,快速准确的进行泊车,解除了因驾驶员技术对车位空间的限制。
自动泊车系统是一个复杂的系统,其中涉及到了多个学科的交叉[2]。既要研究汽车的运动规律,为控制汽车打下基础,同时还要使用多个传感器来对车辆周围环境进行检测并且还要对各种环境变化进行相应的反馈。自动泊车辅助系统作为智能交通系统中的一项关键技术可以为无人驾驶技术提供理论基础和技术支持,所以自动泊车辅助系统是国内外各大汽车公司的热点课题之一。
1.2 自动泊车技术研究现状
自动泊车技术并不是一种新鲜的技术,早在20世纪90年代初期,人们就已经开始了关于自动泊车系统方面的研究。例如,1990年J. A. REEDS 研究出了圆弧与线段相互连接的泊车路线,并且规划了车辆自动泊车的最优路线。
1996 年法国学者 Paromtchik 等通过小车模型进行实验,通过将超声波传感器安装在模型上面,在通过搭建环境进行模拟的平行泊车的同时利用超声波传感器对车位进行检测,进行了泊车运动路线以及轨迹控制等方面的研究。
同样是在1996年,在德国巴伐利亚知识工程研究中心 Holve 等人的实验中,他们在模型小车上安装了一个编码器和三个超声波传感器。通过对小车运动过程进行分析可以知道整个泊车操作过程大致有四个阶段:第一阶段,车辆向前行驶并开始进行车位识别;第二阶段,车辆进入准备泊车时的待泊车区域;第三阶段,车辆按照规划好的轨迹函数,向车位行驶;第四阶段,车辆调整泊车后的位置,使其达到规划好的泊车区域。在控制小车进行自动泊车操作时,先根据人们泊车操作的实践经验建立起模糊的规则,最后根据这个模糊的规则实现对泊车操作的自动控制。
2000年,英国伯明翰大学 Jiang也对自动泊车系统进行了研究。他们首先为实验搭建了小车模型硬件平台,以单片机控制为基础同时还配备了超声波传感器来对障碍物进行检测。在该系统中,他们首先搭建了几种不同的车位环境,小车对车位的搜索工作是通过其上配备超声波传感器完成的;然后在各种环境约束下规划出一条没有障碍的路线,利用对模型的控制实现了根据不同环境规划出合理路线并进行成功进行泊车的功能。
2008年,在英国剑桥大学的Ozkul等以视觉信息识别为基础开始对模糊控制的泊车系统进行了研究,通过对图像采集系统采集的图像信息进行分析处理建立其模糊控制算法,然后规划出车辆泊车过程中的最优路线。
在中国,吉林大学尚世亮首先开展了基于超声探测方法的自动泊车车位检测的研究,除此之外他还研究出了一种基于超声波检测并且可以进行自动纠正的车位识别方法。通过在软件中建立车辆动力学模型,并基于该模型添加遗传算法,实现对平行泊车的转向的控制。然后研究自动泊车转向控制中的电机,并将遗传算法转向控制策略运用于电机控制中。最后在真实车辆上进行自动泊车转向控制的测试,验证转向控制策略的有效性。
超声波传感器在自动泊车辅助系统的研究开发中有着非常重要的作用[3]。以超声波传感器为基础的的车位识别技术是开发自动泊车系统的一个先决条件。以上的几个例子,都是以超声波传感器为基础,通过对外界环境的检测确定车辆周围是否有障碍物。对于轨迹控制,目前研究的方法主要有两种:一种是通过对人们泊车操作的路线进行分析提前规划好一条合适的路线进行泊车研究;另外一种以驾驶员的泊车经验为基础,并不用确定具体的路线而只需要对建立一条模糊的规则,通过设计一种模糊的控制器来配合泊车[4]。
相对于超声波传感器,视觉传感器作为一种新兴技术,在近几年才得到发展,国内外利用视觉传感器对自动泊车系统进行的研究相对比较少。因为人类就是以视觉观察周围的世界的,所以自动泊车中对环境的检测能不能也以视觉系统实现呢?由于现在计算机已经可以对图像进行处理并识别出具体的物体了,所以一些泊车领域的学者已经开始在自动泊车系统中加入图像技术[5]。虽然国内外学者已经开始对基于视觉信息的自动泊车系统进行研究,但大多数处于理论研究阶段或者针对模型小车进行算法验证。
1.3 自动泊车技术的发展历史
自动泊车系统最早进入实用环节是在1992年,在这一年大众发布了自家的一款概念车。这款名为IRVW Futura的概念车搭载了大众为其研发的自动泊车系统,为了实现自动泊车功能,大众在它的后备箱中配备了一个跟个人电脑大小差不多的计算来对数据进行处理分析并控制整个自动泊车系统。由于这个系统的成本太高,所以大众并没有将该系统量产。
后来随着计算机技术的发展,计算机体积的减小以及成本的降低也使自动泊车系统的成本得到了控制,在2003年丰田的自动泊车功能作为普锐斯的一项可扩展功能,可由用户选择是否安装。
在2005年雪铁龙开发出了一款名叫City Park 的系统,搭载此系统的汽车可以完成侧方停车、正面停车以及倒车停车等几个动作[6]。
2006年,英国版的普锐斯也开始提供加装自动泊车功能的服务,但是由于成本原因,选择这个改装服务的用户需要花费大约700 美元。
如今,随着自动泊车技术的成本的降低以及技术的进一步完善,已经有越来越多的汽车开始搭载自动泊车系统,目前已经有大众、宝马、奔驰等多个企业的车型装备了该系统。
在国产品牌方面,由于成本的进一步降低,自动泊车从以前高档轿车独享也开始慢慢扩展到一些中档汽车也开始搭载该系统。日系品牌方面,在凯美瑞、锐志、奇骏等产品的高配车型上搭载了自动泊车系统。
1.4 本章小结
本章通过分析目前的交通现状与人们的日常需求得出进行自动泊车系统研究的必要性,而且现有的技术水平已经可以满足自动泊车系统的研究。其实对自动泊车辅助系统的研究很早就已经开始了,并且一直自动泊车技术一直在发展中,本章就简单介绍了一下国内外对自动泊车系统研究的历史。虽然自动泊车系统还在发展中,但是发展到现在已经可以不用仅停留在研究阶段了,所以很多汽车厂家为了提高自家竞争力,已经开始在自家汽车上搭载自动泊车辅助系统,本章还简单介绍了一下自动泊车系统实际应用的情况和它们的发展历史。
第2章 系统方案设计
就目前而言,自动泊车系统的研究主要有两个方向,分别是基于超声波传感器的自动泊车系统研究以及基于视觉信息的自动泊车系统研究。虽然研究方向不尽相同,但是它们都是由车位识别、轨迹生成和轨迹控制三个部分组成,不同的是基于超声波传感器的系统车位识别仅由超声波传感器完成,而基于视觉信息的系统车位识别由超声波传感器和图像传感器两个部分共同完成。这三个部分也可以描述成环境数据采集系统、中央处理器和车辆控制系统[7]。其中环境采集系统用来检测车辆周围的环境,然后将采集到的数据通过既定协议传输给中央处理器;中央处理器在收到数据后就开使对数据进行处理分析,并最终根据分析结果确定车辆的位置以及周围的环境从而确定倒车的起始点,再然后就是根据这些数据信息规划出一条没有障碍物的泊车路线,并将路径转化成相应的控制策略,再向车辆控制系统发送相应的控制信号;这些控制信号一般是电信号,车辆控制系统在收到这些电信号后就可以控制车辆完成相应的操作从而使车辆按照规划好的路径行驶。
2.1 整体系统设计
本次课题的目标是搭建出一个汽车的自动泊车系统,然而考虑到汽车的结构复杂,改装汽车难度大且有一定的危险性,所以本次课题将使用电机控制的小车来替代真实的车辆,通过控制小车完成自动泊车操作来验证系统是否搭建成功。
本次的系统由软件系统和硬件系统两个部分组成,其中硬件系统是为验证自动泊车所搭建的硬件平台,而软件系统负责控制硬件部分。
本系统的硬件部分由中央处理器、数据采集模块和小车控制系统三个部分组成。其中数据采集系统负责代替人眼确定周围的环境,中央处理器负责处理分析数据,车辆控制系统负责控制小车运动。系统工作时,利用数据采集系统检测小车的位置,通过中央处理器控制小车控制系统控制小车的前进、后退、左转与右转[8]。本次设计系统的总体结构可以用下图2-1表示。

图2-1 系统总体结构
2.2 数据采集系统设计
对车辆周围环境的采集可以通过对车辆周围进行图像采集,然后对图像进行分析,确定障碍物与车位位置。但是对图像的分析比较麻烦需要进行大量的数据处理,而且在黑夜中图像采集将受到限制,其实在数据采集时并不需要知道障碍物具体是什么,在车辆行驶过程中车辆以外的其它物体都可以视为障碍物,所以在数据采集时只需要知道车辆周围有没有其它物体就可以了。如果仅仅是确定车辆周围有无障碍物方法还是比较简单的,目前主要有红外传感器和超声波传感器两种方案可供选择。
红外传感与超声波传感介质不同但是基本原理大同小异,就是向周围发射红外光或超声波,当碰到障碍物后红外光或超声波会被反射回来,所以检测是否有红外光或超声波被反射回来即可确定周围有无障碍物。虽然原理大致相同,但是应用场景也有不同的限制,由于所有的物体都在发射红外光,所以当红外传感器暴露在强阳光下时,会使传感器失灵,所以考虑到人们会有在露天情况下停车的需求,所以本次选择超声波模块进行环境数据的采集,具体的传感器型号为常用的HC-SR04超声波模块,其工作频率是40kHz的超声波频率。
2.3 中央处理器选择
本次系统需要有一个中央处理器来对数据进行处理分析并对小车进行控制,而单片机是一种微型计算机,它的集成电路芯片上不光有中央处理器而且还包含了存储器、定时器/计数器(timer/counter)、各种输入输出接口等部分,所以本次设计中选用单片机就可以满足要求。
本次课题中单片机的功能是控制传感器的采样同时处理采样数据并根据情况控制小车。根据需求与成本等方面综合考虑,初步确定在AT89C51和STM32F103这两系列中选择一种来完成本次课题。
AT89C52一种通用微处理器,它的处理器只有8位,采用的内核是符合工业规范的C51内核,在工业中应用广泛。但是随着工业的发展,要处理的数据越来越复杂,对可扩展性的要求也越来越高,8位的处理器已经逐渐无法满足人们的需求,在实际应用中C51内核的单片机也已经少之又少了。然而由于C51内核的单片机使用简单价格便宜,比较适合入门,所以在很多学校的教学中依然采用C51内核的单片机来进行相应的实验。
STM32F103系列是ARM公司下的子公司意法半导体(ST)公司推出的,因为其具有超高的性价比和可以利用库函数编程等特点而被广泛应用于各个领域。在编程时,对单片机的操作可以不用从头编写直接利用库函数就可以完成对单片机的一系列的操作,而且厂家一般还会提供相当多的函数库方便了对单片机的利用,所以虽然在编程时与C51相比麻烦了许多但却可以不用从头造轮子从而节约下来不少力气。并且STM32的主频为72MHz,运算速度快,可以处理复杂的运算。同时STM32系列单片机IO口较多,可扩展性也大大增强。
所以综合考虑,本次设计的系统中采用STM32F103RCT6芯片作为主控制器,该芯片是基于ARM cortex-M3内核的32位处理器,内部采用哈佛结构、其中集成有64KB的RAM和512KB的FLASH,运算速度快,并且具有体积小和低功耗的特点[9]。
2.4 其它模块设计
本次设计是要研究自动泊车系统,所以需要搭建一个小车来作为研究的对象,系统除了自动泊车相关的部分外还应有其它模块才能保证系统正常运行。本次小车的动力是由电机提供的,也就是车辆控制部分是两个电机。首先要解决供电问题,因为小车是要运动的,所以使用充电器的有线连接是不合适的,所以还要添加一个电源模块,使系统可以使用电池作为电源。同时为了尽量真实的还原人们泊车的场景,小车除了可以使用自动泊车系统进行控制外还应该有一种手动控制模式,模式的切换可以使用小车上的按键控制,但对小车的控制却不能采用按键控制了,所以考虑添加一个红外遥控模块,使用遥控器来对小车进行手动控制。除此之外还有一些LED以及蜂鸣器等模块来显示系统所处的状态。
2.5 本章小结
本章介绍了自动泊车系统的组成部分,自动泊车系统有环境数据采集系统、处理器和车辆控制系统三个组成部分,根据每个单元功能不同实现方法也不一样考虑到条件限制也需求提出合理的解决方案,并依据满足需求的同时还要尽量节约资源降低成本的原则选出了最终方案,然后根据最终方案确定各部分所要使用的器件。同时为了使系统正常工作,除了为泊车系统服务的模块外,系统还应该包含一些基础模块和其它的扩展模块。
第3章 系统硬件设计
3.1 传感器电路设计
 HC-SR04模块的特点是工作电压为5V,可以使用单片机供电,探测距离范围从2cm到450cm,可探测距离范围广,而且精度比较高可达0.3cm[10]。HC-SR04模块共有四个引脚,它们分别为:VCC、trig(控制端)、echo(输出端)以及GND。该模块可以直接与单片机的IO口连接。当单片机的IO口与超声波模块连接时所要遵守的通信协议也是比较简单的:当模块的trig端口接收到10us以上的高电平的时候模块就开始自动发送8个40kHz的方波,并且自动检测是否有信号返回,当检测到有信号返回时则输出一段高电平,高电平持续的时间即为超声波从发射到返回的时间[11],模块的时序图如图2-2所示。
HC-SR04模块的特点是工作电压为5V,可以使用单片机供电,探测距离范围从2cm到450cm,可探测距离范围广,而且精度比较高可达0.3cm[10]。HC-SR04模块共有四个引脚,它们分别为:VCC、trig(控制端)、echo(输出端)以及GND。该模块可以直接与单片机的IO口连接。当单片机的IO口与超声波模块连接时所要遵守的通信协议也是比较简单的:当模块的trig端口接收到10us以上的高电平的时候模块就开始自动发送8个40kHz的方波,并且自动检测是否有信号返回,当检测到有信号返回时则输出一段高电平,高电平持续的时间即为超声波从发射到返回的时间[11],模块的时序图如图2-2所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


