基于机械臂结构的3D打印机虚拟样机设计及仿真毕业论文
2020-04-10 16:57:48
摘 要
3D打印技术发展至今已有几十年,然而3D打印机在结构形式上大多数是基于直角坐标系,而机械臂形式鲜有耳闻,如今机器人技术也越发成熟,因为其结构灵活,动作可控,精度高的特点,将其与3D打印技术结合未尝不可,同时也互相丰富各自领域。本文基于机械臂结构3D打印机,主要研究机械臂的运动控制部分,并构建虚拟样机进行仿真。本文机械臂形式主要是基于Dobot机器人,本文分析了Dobot机器人所采用的3D打印技术,用Solidworks建立了Dobot机械臂模型,分析了其结构特性,并运用D-H法在Matlab中建立Dobot机械臂的运动学模型,通过齐次坐标变换矩阵求得它的正、逆运动学解,完成了仿真工作的准备阶段。在仿真阶段,本文采用笛卡尔空间轨迹规划方法对机器人进行了轨迹规划,并设计其轨迹路径(直线,圆弧,金字塔结构形式),然后通过Matlab中的Robotics Toolbox工具箱中的Ctraj函数(该函数的基本原理是运用了五次多项式插值方法)计算出了设计轨迹的中间点,最后在ADAMS中以样条函数的形式将中间点导入已建立好的模型,分别驱动Dobot机械臂3个电机控制的转动关节进行仿真,成功模拟打印出了直线轨迹和圆弧轨迹,并进一步仿真打印出了长方体,圆柱体和金字塔形结构的外轮廓。
本文特色:从Dobot机械臂打印机的基本结构开始分析,结合理论和实物结构讲解,一步步实现仿真,对于了解Dobot机械臂结构如何完成实现指定运动轨迹有重大意义和参考价值。
关键词:Dobot机器人,运动学分析,Matlab仿真,ADAMS仿真
Abstract
The development of 3D printing technology has been for several decades. However, most of the 3D printers are based on rectangular coordinate systems in their structural form, and robotic arms are rarely heard. Today, robotics technology has become more mature because of its flexible structure and controllable movements. High accuracy, combined with 3D printing technology is not a bad idea, but also enrich each other's fields. This thesis is based on the robot arm structure 3D printer. It mainly studies the motion control part of the robot arm and builds a virtual prototype for simulation. In this paper, the robotic arm is mainly based on the Dobot robot. This paper analyzes the 3D printing technology used by the Dobot robot, establishes the Dobot robotic arm model using Solidworks and analyzes its structural characteristics, and uses the DH method to establish the motion of the Dobot robotic arm in Matlab. Learning model, through the homogeneous coordinate transformation matrix to obtain its positive and inverse kinematics solution, completed the preparation phase of the simulation work. In the simulation phase, this paper uses Cartesian space trajectory planning method to carry out trajectory planning for the robot, and design its trajectory path (linear, arc, pyramid structure), and then through the Ctraj function in the Robotics Toolbox toolbox in Matlab. The basic principle of the function is to use the fifth-order polynomial interpolation method to calculate the middle point of the design trajectory. Finally, in the ADAMS, the intermediate point is introduced into the established model in the form of a spline function, and the three robots of the Dobot robot are respectively driven. The control of the revolute joints was simulated, and the straight trajectory and arc trajectory were successfully simulated, and the outlines of the cuboid, cylinder and pyramid structure were further simulated.
Features of this thesis: Starting from the basic structure of the Dobot robot printer, combining theoretical and physical structure to explain, step by step to achieve the simulation, it is of great significance and reference value to understand how the Dobot robot arm structure accomplishes the specified movement trajectory.
Key words: Dobot robot, kinematics analysis, Matlab simulation, ADAMS simulation
目录
第1章 绪论 1
1.1课题的研究目的及意义 1
1.2国内外研究现状 2
1.3 本文的主要工作 2
第2章 机械臂3D打印机三维建模及结构分析 4
2.1 机械臂3D打印机三维建模 4
2.2 机械臂结构机构机理 6
2.2.1 机械臂3D打印机的内部结构介绍 6
2.2.2结构特点分析 9
2.3 机械臂3D打印技术分析 11
2.3.1 3D打印技术 11
2.3.2 机械臂3D打印机用材 11
2.3.3 打印过程存在的问题 12
第3章 机械臂3D打印机运动学分析 14
3.1 运动学模型 14
3.1.1 D-H参数 14
3.1.2 Dobot机械臂的D-H参数 15
3.2 运动学求解 17
3.2.1 齐次变换矩阵介绍 17
3.2.2正运动学求解 17
3.2.3 逆运动学求解 18
第4章 机械臂3D打印机轨迹规划 20
4.1 机器人轨迹规划 20
4.2 笛卡尔空间轨迹规划 20
4.2.1 插补的方式 20
4.2.1插值算法 21
4.3 Matlab仿真Dobot轨迹规划 22
4.3.1 在Matlab中建立Dobot运动学模型 22
4.3.2 直线轨迹规划 23
4.3.3 圆弧轨迹规划 26
4.3.4 金子塔结构轨迹规划 27
第5章 机械臂3D打印机ADAMS仿真 29
5.1 ADAMS仿真操作流程 29
5.2仿真的注意事项 29
5.2.1 Solidworks简化模型注意事项 29
5.2.2 ADAMS仿真注意的问题 30
5.3 仿真 30
5.4 仿真总结 33
第6章 总结与展望 34
6.1 论文总结 34
6.2 经济性与环保性分析 34
6.3 课题展望 35
参考文献 36
附录 37
致谢 42
第1章 绪论
1.1课题的研究目的及意义
3D打印技术又称增材制造,它是一种将材料自下而上逐层叠加的工艺[1],它将计算机内的CAD三维数据模型逐层切片,分别得到各层的轮廓数据,然后通过有选择地烧结粉末材料,或固化液态树脂,或喷涂粘合剂等打印出每层的轮廓,然后逐层叠加,形成最终设计的模型。3D打印技术的思想最早源自19世纪末的美国,直到20世纪80年代才开始被人们研究,并发展到现在,拥有庞大的全球市场,因此也有人称3D打印技术是“上上世纪的思想,上世纪的技术,这个世纪的市场”[2]。20世纪70年代末到80年代初,美国的Alsn Hebert和Charles,日本的丸谷洋二和小玉秀男四人分别在不同时间提出增材制造的概念[3]。并且,1986年,Charle Hull首次推出了光固化法(SLA),打开了3D打印技术的发展,同年他也创立第一家3D打印公司——3D Systems公司,并在1988年推出第一台3D打印机SLA-250。1988年,美国的Scott Crumpt提出了熔融沉积制造(FDM),另一种3D打印技术,也同样创立了一家3D打印公司——Stratasys公司。1989年,C.R.Dechard提出了选择性激光烧结法3D打印技术,1993年,麻省理工大学的一名教授提出了立体喷墨3D打印技术,3D打印技术的发展日趋蓬勃。美国Wohler协会在2013年分析指出,2012年3D打印设备与服务全球直接产值22.04亿美元,3D打印市场持续增长[4]。
与传统的车削铸造等制造形式相比,3D打印有以下突出优点: 1、突破了众多传统工艺的设计局限,设计空间无限。传统制造技术因为受限于制造方法,设计零件经常要考虑能否加工的出来,这样加工的零件能否满足要求等,导致零件设计都趋于单一。2、对于结构复杂的产品,它不会增加制造成本也不会花费更多时间。因为3D打印是逐层叠加,一层一层的技术,无论结构上多么复杂,它都可以通过这种方法实现,可能会因需要添加支承而耗费些时间,但不需像传统工艺那样面对不同零件要设计好技术方案。3、制造出的产品可一次性完成,无需组装,节约大量人力物力。传统工艺通常不能一次加工一个复杂的零件,往往需要分块加工然后拼装。4、时间可控,可按需生产,减少产品库存。3D打印的时间只取决于要打印的总材料的量,可以计算总生产时间,合理控制生产周期。5、对于工匠,无需太多操作技能和长期经验。工匠只需熟练掌握必要的软件就可以进行生产,同时也大大提高了安全性[5]。
此外,3D打印技术也不仅用于生产,在很多领域它都融入的生活,比如,在食品领域,有3D打印的咖啡机,3D打印的糖果、巧克力、饼干等;服装领域有3D打印的衣服;医疗领域有3D打印的药物外壳,它能控制药物释放由慢逐渐变快,极大程度提高了药物的利用率[6]。还有3D打印照相,3D打印建房子等等。
3D打印技术无论从哪个方面来说对于人们,对于时代,都有重大意义。但3D打印机的结构形式,从发展至今,大多拘泥于直角坐标系结构,当然直角坐标系结构优点众多。自20世纪中期机器人诞生以来,模块化的机械臂技术已日趋成熟,机械臂由于其本身特性——结构简单,动作灵活,控制精度高,使其完美运用于3D打印[7],并且机械臂所能完成的工作还有很多,将3D打印技术与机械臂结合,无异于给机械臂增添一项重要功能,对于未来一体化的发展,意义重大。
1.2国内外研究现状
3D打印技术的核心是成型装备。目前,美国、德国、日本在该方面技术比较成熟,在设备拥有量上,美国占全球38%,排名第一,中国占9%,继日本和德国排名第四。美国的3D systems公司生产的SLA设备在国际市场占有比例最大,其最新Viper Pro System型号的SLA设备,最大成型尺寸可达1500mm×750mm×550mm,日本的DENKEN工程公司和AUTOSTRADE公司用680nm左右波长的半导体激光器作为光源取代SLA设备使用的紫外光源,大大降低了SLA设备的成本[8]。在SLS技术方面,德国EOS公司和美国3D Systems公司研制的设备成型精度已经可达0.1mm-0.2mm。在3D打印技术方面,耗材是目前制约3D打印发展的主要因素,可适用特定场合的特定可打印材料的寻找是3D打印普遍存在的挑战之一,在这方面,以色列的Objet公司贡献卓越,该公司为Connex多材料系列打印机研制了39种新的“数字材料”,可供选择的基本材料多达107种,这些“数字材料”均由基本材料复合而成,在强度,硬度,韧性,刚度及质地方面,其性能各异,这使得工程师可以较准确模拟打印的产品的材料性能[3]。此外,现在3D打印对于金属材料的寻找尤为迫切,如不锈钢,工具钢,钛合金等,这些技术目前尚未完全突破。我国对于3D打印的研究始于20世纪90年代初期,成功研制了使用氨镉气体激光器的LPS系列和使用Nd:YVO4半导体泵浦紫外固体激光器的SPS系列SLA设备。2001年,又研制出HLPS250型高分辨率SLA设备,成型精度达0.01mm。2005年,华中科技大学研制出可应用于金属、陶瓷、高分子、覆膜砂等功能材料的3D打印设备,其成型台面可达500mm,性能接近国外先进水平。后来,武汉华科三维科技有限公司研制了世界最大工作台面的SLS设备,可达1000mm×1200mm×1400mm,为一些大型装备制件提供了技术支撑[9]。目前基于机械臂结构形式的打印机有SCARA手臂式,它是一种平面关节型机器人,主要依靠关节在平面上旋转控制末端在平面中的位置,用于升降的Z轴采用滑动导轨形式,保证了Z轴的刚度和精度[10]。而Dobot机械臂3D打印机机是近几年研发出来,它是关节旋转型机构,结构灵活,很多搬运机器人,焊接机器人都是此结构,因此意味着Dobot机械臂3D打印机这种结构形式还可以开发出很多其他的功能,应用前景比较大。
1.3 本文的主要工作
本文研究对象是Dobot机械臂式3D打印机,主要研究内容有:Dobot机构的结构原理,Dobot机械臂的运动学分析,Dobot在ADAMS中的仿真。基于此,本文展开了以下几项工作:
1)在Solidworks中建立Dobot机械臂式3D打印机的模型,并分析Dobot机械臂的结构机理及结构特性。
2)分析Dobot机械臂式3D打印机的3D打印技术及注意的问题。
3)用D-H法建立Dobot机械臂的运动学模型并求出其正、逆运动学解。
4)用Matlab计算机械臂打印机模拟运动轨迹的插值点。
5)将插值点数据导入ADAMS中进行运动轨迹仿真。
第2章 机械臂3D打印机三维建模及结构分析
2.1 机械臂3D打印机三维建模
本文建立模型用的是Solidworks三维建模软件,Solidworks功能强大,操作简单,易学易用,使得它成为目前主流的三维CAD建模软件。下面我将介绍Dobot机械臂模型中几个典型零件是如何建立的。
(1)支撑平台模型
支撑平台模型如图2.1。它的建立比较简单,首先是画出矩形草图,然后画出外围四个孔中的一个,用线性阵列命令指定距离阵列其余四个孔,再用凸台拉伸命令建立出了一个主体,然后用圆角命令指定半径画出矩形四个角的圆角,最后用拉伸切除命令切除到指定距离画出向下凹陷的圆形平台,其中用于固定的有规律排列的孔也是用线性阵列命令结合拉伸切除命令实现的。这样,一个支撑平台就形成了,模型中还有其他类似的平台零件和电机模型都是基于以上命令建出的就不一一介绍。
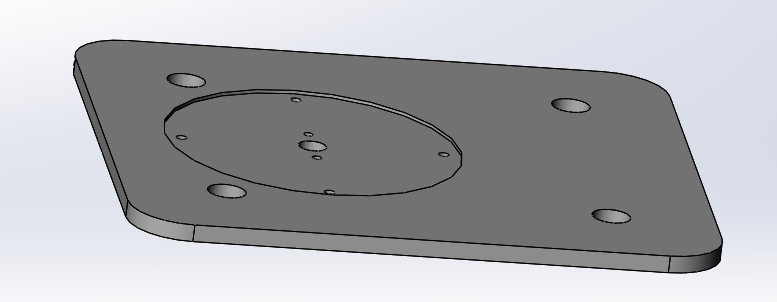
图2.1 支撑平台
(2)连杆模型
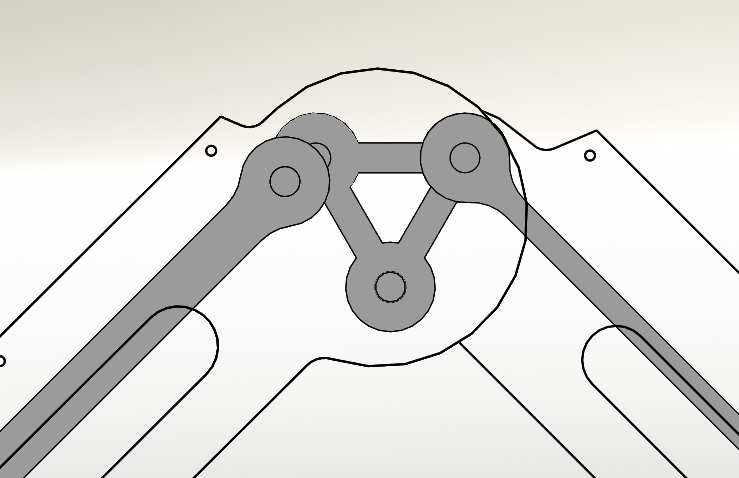
Dobot机器人的动力都是通过连杆传动,其中连杆有不同尺寸,图2.2展示的是其中一种尺寸的。它的建模主要是草图的处理,首先确定好距离画出两端的内外圆,再用矩形命令以其中任意圆心为矩形中心画个长度足够长,指定宽度的矩形,最后用实体裁剪命令将多余的线全部裁剪,凸台拉伸,将四个拐角用圆角命令处理。
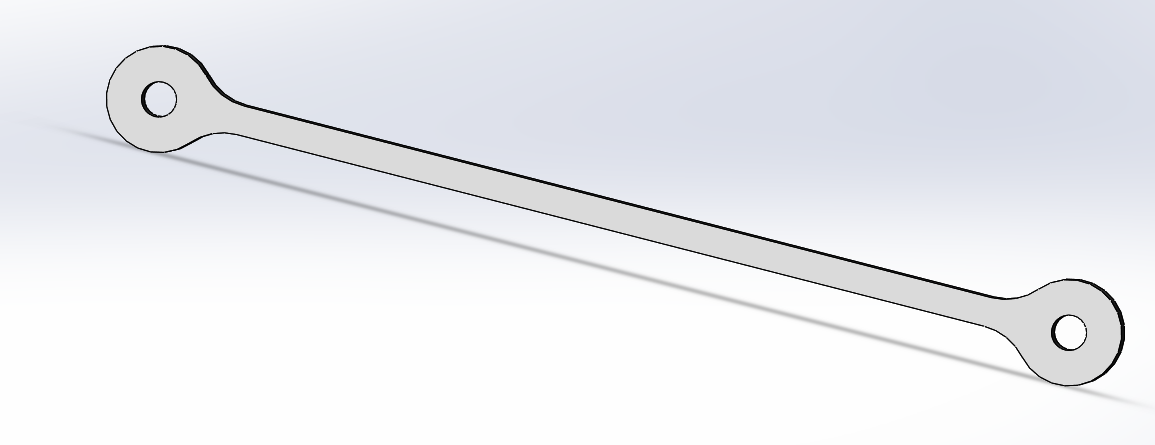
图2.2 连杆模型
(3)前臂模型
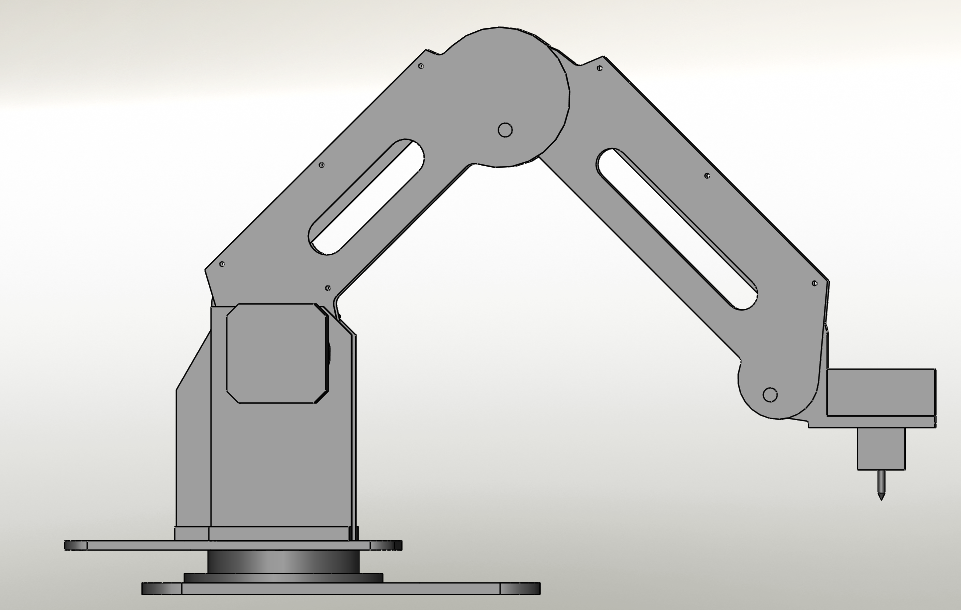
前臂模型如图2.3。前臂模型外轮廓相对复杂,它的处理是在草图中用直线命令做参考线找到各个圆的圆心,把圆画出,两圆间的直线通过添加相切几何关系画出,所有轮廓画出后凸台拉伸,就完成一个臂的模型,再做个基准参考面,用镜像命令画出另一端。注意这左右侧的臂并不是一样,左下角一侧有孔一侧没孔,还有用个拉伸切除命令。
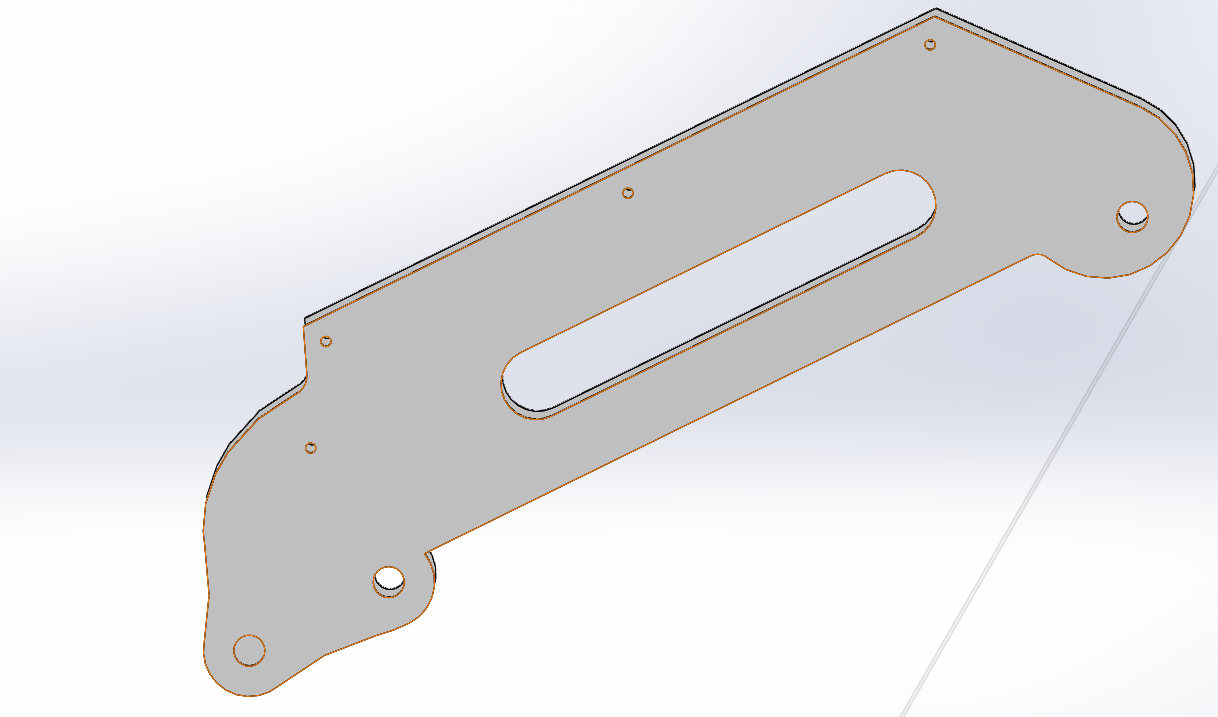
图2.3 前臂模型
(4)喷头支架模型
喷头支架模型如图2.4,它的建模思路是先画出一侧的模型,再做的基准面镜像对称出另一侧。中间部分是选其中一侧做草图的绘制平面,画出矩形,在凸台拉伸成形到另一侧,再在上面拉伸切除图中的各个孔型。
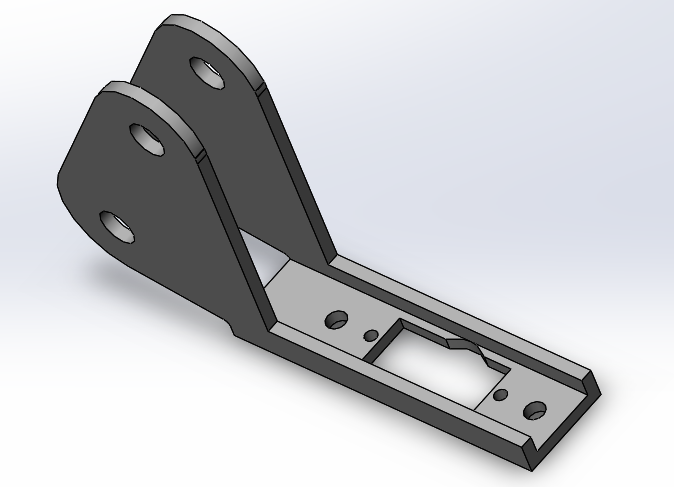
图2.4 喷头支架
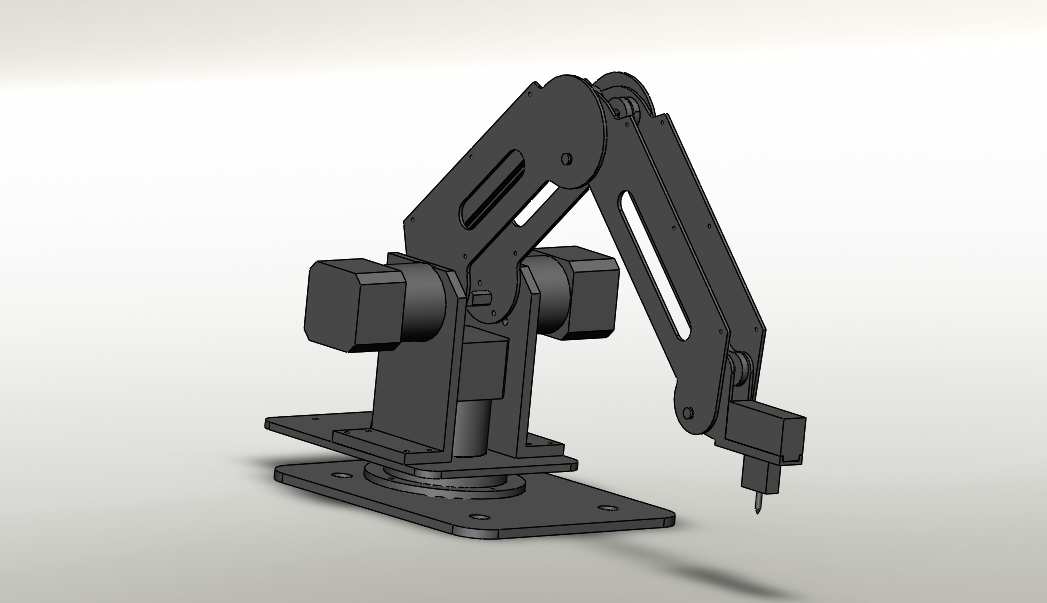
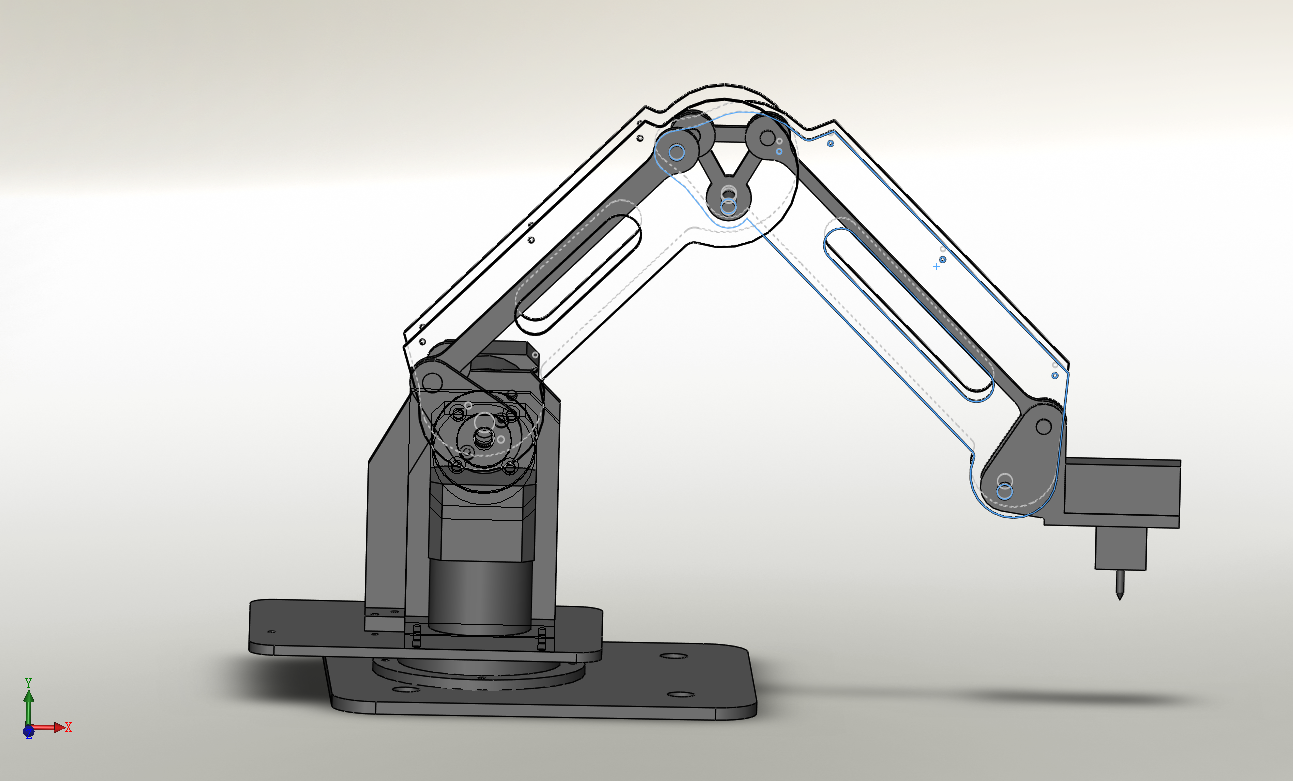
(5)总装配体模型
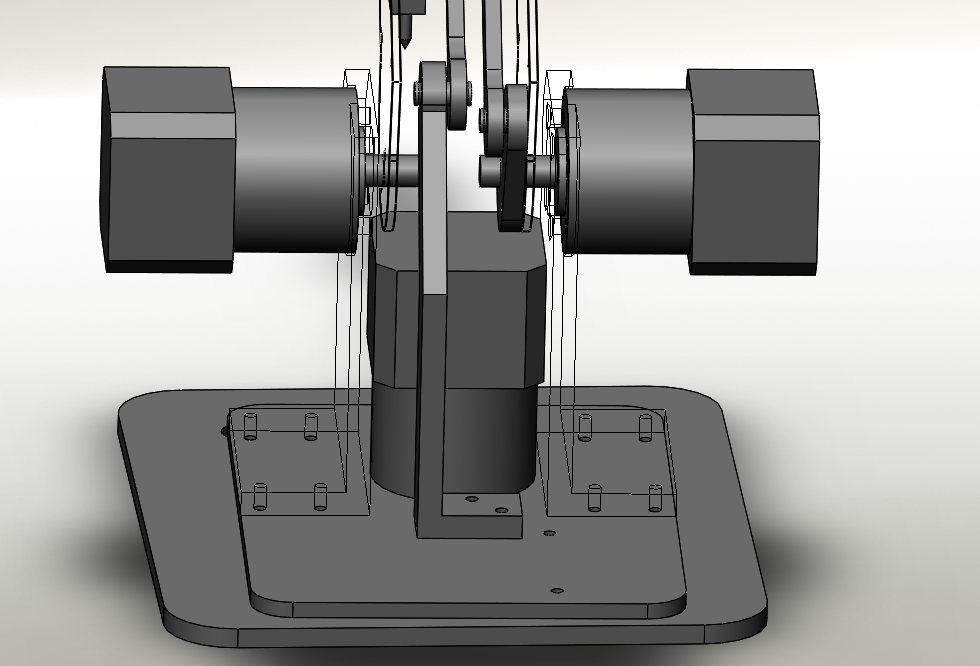
总装配体模型如图2.5。总装配体主要是根据各个零件间的位置关系添加装配关系,确保每个零件间的相对位置和一些零件间的相对转动。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


