ATV等速驱动半轴中间轴上下料机械手结构设计毕业论文
2020-04-11 17:40:51
摘 要
在现代高速发展的工业生产中,制造行业为提高产品的生产率,加快生产进度,提高产品质量水平,非常重视生产线的自动化程度。工业机器人从面世起经历了长时间的发展,越来越多的被应用在自动化生产线上,直到现在,机械手仍被不停改进设计,具有越来越多的优点,机械手从而被企业大量采用。目前,工业机器人广泛的应用在一些工作环境恶劣的情况。
在ATV等速驱动半轴中间轴的生产线上,为了提高工作效率,需要使用工业机械手来进行上下料工作,本文将设计一台三自由度的机械手,用于工件的上下料。设计之前,首先学习了前人在工业机器人的方面所做的研究,综合得出自己的设计。本论文中,首先,对工件进行特点分析,确定中间轴的工艺流程,接着确定工作环境,确定机械手的方案,然后进行机械手的结构设计,包括夹持式手爪机构,大小臂俯仰摆动结构,基座的结构,计算选择合适内径的液压缸并进行其他参数的计算选择,本文还进行三维建模与静应力分析,判断机械手设计的安全性。
关键字:机械手;轴;结构;液压
Abstract
In the modern high-speed development of industrial production, the manufacturing industry places great emphasis on the automation of the production line in order to increase product productivity, speed up production progress, and improve product quality. Industrial robots have experienced a long period of development since their launch, and they have been increasingly applied to automated production lines. Until now, robots have been continuously improved in design and have more and more advantages. Robots have been used in large numbers by companies. At present, industrial robots are widely used in some harsh working conditions.
In the production line of the ATV isokinetic semi-shaft intermediate shaft, in order to improve the work efficiency, industrial robots are required to perform the loading and unloading work. This article will design a three-degree-of-freedom robot for the loading and unloading of workpieces. Before designing, first of all studied the research done by predecessors on the aspect of industrial robots and synthesized their own designs. In this paper, firstly, analyze the workpiece, determine the process flow, then determine the working environment, determine the robot's scheme, and then carry out the structural design of the robot, including the gripping gripper mechanism, the large and small arms, the pitching swing structure, and the structure of the base. Calculate and select the appropriate inner diameter of the hydraulic cylinder and calculate the selection of other parameters. This paper also conducts three-dimensional modeling and static stress analysis to determine the safety of the robot design.
Keywords: Manipulator; Shaft; Structure; Hydraulic
目录
第1章 绪论 1
1.1前言 1
1.2 国内外机械手发展历程 1
1.3 机械手的未来发展趋势 2
1.4 课题的目的及意义 2
1.5 本文的主要研究内容 3
第2章 机械手方案设计 4
2.1 轴的分析 4
2.1.1 零件的作用 4
2.1.2 零件特点分析 4
2.1.3工艺路线制定 5
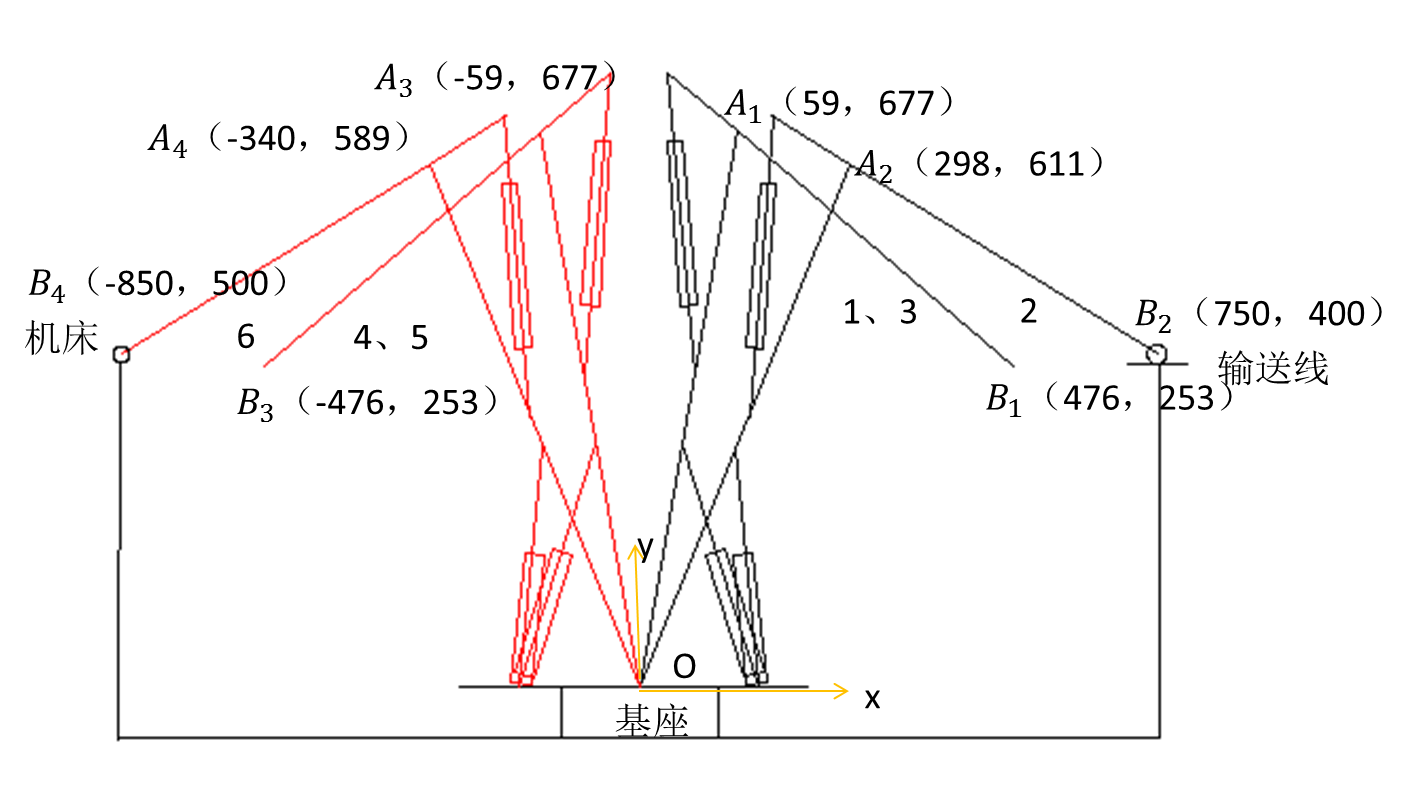
2.2 生产线布局及工作环境 5
2.3 机械手方案 7
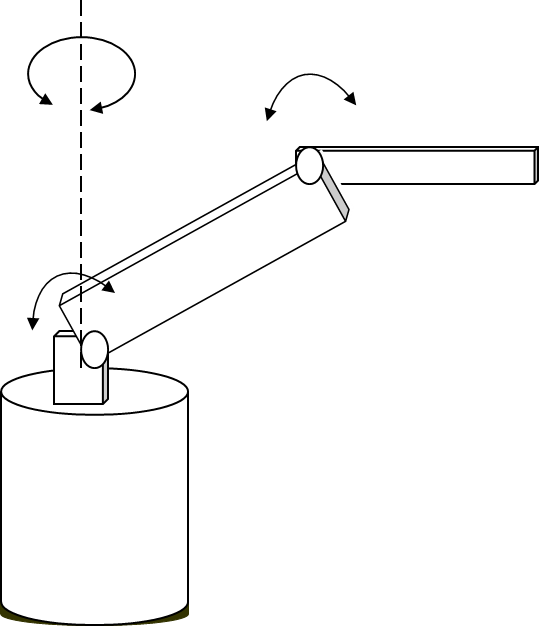
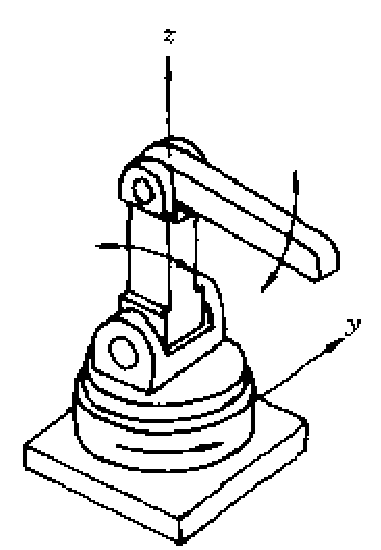
2.3.1 机械手坐标形式 7
2.3.2 自由度确定 8
2.3.3 工作流程 9
2.3.4 机械手相关参数 11
2.4 本章小结 11
第3章 机械手结构设计及计算 12
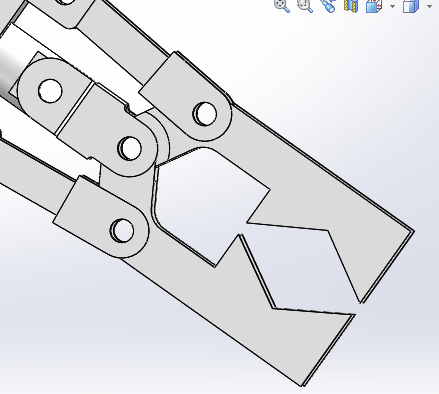
3.1 夹紧装置设计 12
3.1.1 夹紧机构设计 12
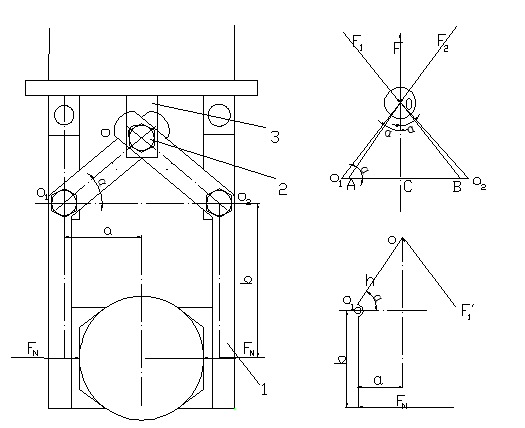
3.1.2 夹紧力计算 13
3.1.3 驱动力计算 14
3.1.4 夹紧液压缸设计 15
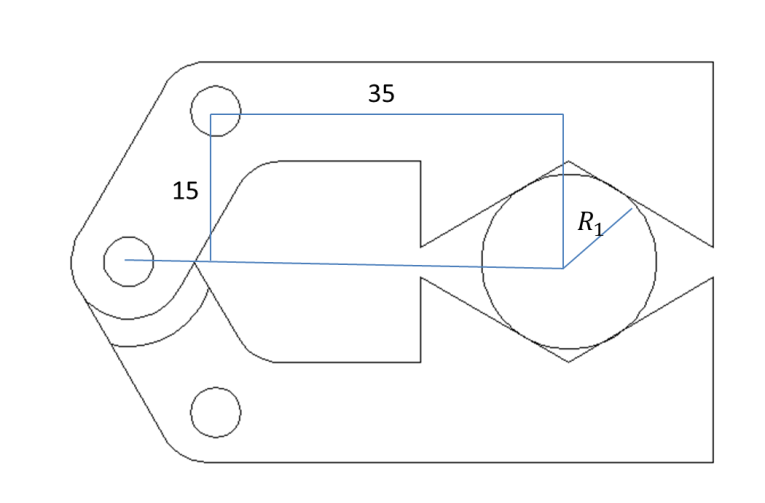
3.1.5 手爪夹持范围 15
3.1.6 夹持误差分析 16
3.2 手臂设计 17
3.2.1 手臂结构设计 18
3.2.2 手臂尺寸设计 19
3.2.3 大臂驱动力矩分析 19
3.2.4 大臂驱动力矩计算 20
3.2.5 大臂驱动力计算 21
3.2.6 大臂俯仰摆动油缸的设计计算 22
3.2.7 大臂活塞杆校核 23
3.2.8 大臂液压缸缸盖螺钉计算及选定 23
3.2.9 小臂俯仰摆动油缸设计 24
3.3 基座设计 25
3.3.1 基座结构设计 25
3.3.2 回转缸驱动力矩的计算 26
3.3.3 回转缸尺寸的初步确定 27
3.3.4 液压缸缸盖螺钉计算及选定 27
3.4 本章小结 28
第4章 机械手建模与仿真 29
4.1 机械手建模 29
4.1.1 摆动液压缸 29
4.1.2 机械手手爪 30
4.1.3 机械手整体 30
4.2机械手有限元分析 31
4.3 本章小结 33
第5章 总结 34
参考文献 35
致谢 37
第1章 绪论
1.1前言
机械手是根据人类手臂工作模式设计的,能按照预定路径进行工作。自动化的生产线上应用了大量的工业机械手来代替人的劳动,因为机械手有很多优点,比如能始终如一的进行同一项工作,不会倦怠;不论环境如何,机械手都能正常的工作;机械手的抓重大,远超人类等。因此,机械手现世后,就不停的有人深入研究机械手技术,扩大机械手的使用范围,改进优化机械手的结构,使机械手更加灵活,功能更丰富,更加高效的应用于自动化生产。
1.2 国内外机械手发展历程
(1)国外研究现状
世界上最早出现的工业机器人,是由Griffith P. Taylor 1935 年设计的。1962年,美国联合控制公司开发了一种工业机器人,它的手臂臂可以转动、伸缩,使用液压驱动方式。1978 年,美国Unimate 公司开发了 Unimation—Vic.am1 型机器人,采用微电脑控制,该机器人主要用于装配工作。自1970 年以来,在德国的机械制造行业,机器人已经初步用于执行焊接,产品运输,生产组装等工作。日本基于美国两种典型机器人进行投资优化,已经达到世界领先水平。20世纪80年代,机器人技术不仅广泛应用于制造业,而且广泛应用于海洋开发,救灾,甚至军事行动。90 年代,对于机器人的研究越来越深入,越来越广泛,在机器人上应用传感器技术,进行反馈控制,能提高机械手的工作精度及适用范围。目前工业机械手有高精化,多轴化发展趋势,产品可以达到6轴,并且负载2 KG的总产品系统重量超过了 lOOKG。
(2)国内研究状况分析:
国内接触工业机器人较晚,国内第一台机械手是1972年出现的,之后,许多研究所开始研发制造各种用途的机器人:北京机械自动化研究所开发了喷涂机器人;广州机床研究所开发了焊接机器人。在国内,在汽车行业中,工业机器人受到企业青睐,汽车生产线上使用大量的机器人。
穆临平设计了具有5 个自由度的关节型装卸机械手,手爪的张合采用的是气动方式。因此,机器人机构输出的力矩小,需要使用传递机构来提高力矩,提高机器人的负载能力。
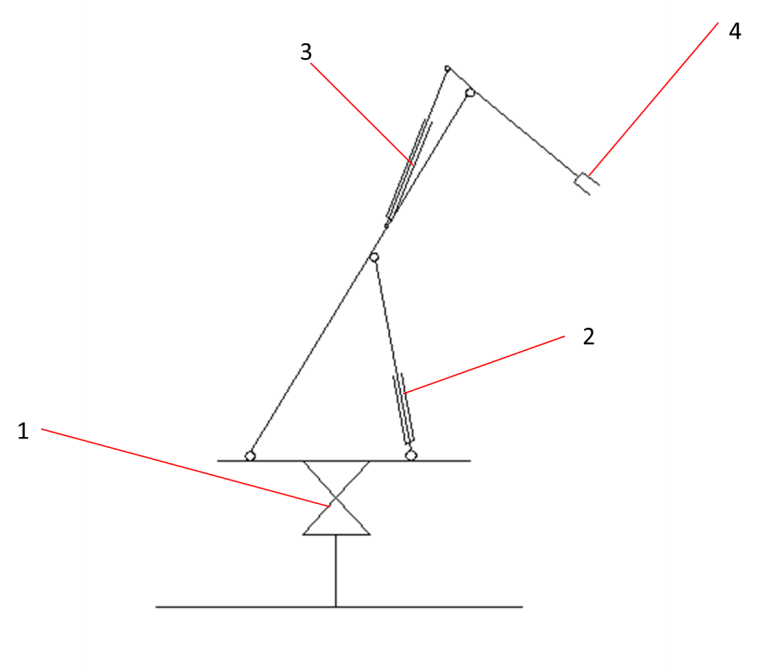
在设计机械手手臂时,还有前辈选择直线形式,对机械手的运动稳定性和工作安全性要求更高。因此,机械手手臂在实际操作中,需要根据自身的控制要求,在进行结构设计时,不能只偏重于手臂的长度,如果只靠使用加大液压缸的直径来提高手臂的刚度,不足以满足系统的需要。根据这种情况,在实际设计中,可以通过添加导杆机构,并在小臂上安装两个导杆,使其与活塞杆形成一个三角形,这就加大了结构的稳定性,从而提高小臂的刚度。另外,可以在大臂上安装四个导杆,形成一个四边形,并要使各个导杆保持空心的状态,以减少大臂的总体重量。
1.3 机械手的未来发展趋势
随着工业的发展进步,自动化程度要求越来越高,工业机械手被越来越多的应用。现在,机械手已经成为实现工业自动化的一种重要手段,在未来,具有以下发展趋势:
1)模块化
一般来说,模块化拼装的机械手的灵活性非常高。模块化机械手方便在机械手上应用不同的模块而使机械手具有不同的功能,进行某些专用工作, 模块化模块化使机械手其可以个性化的运动,从而扩大机械手的使用范围,提高机械手的适应性。
2)重复高精度
机械手的重复定位误差通常是固定的,而且这个误差可以校正, 通过一定次数地重复进行动作,可以测定误差,然后通过编程予以校正,就可以使机械手在重复的工作中具有较高的精度。
3)节能环保
随着新型材料的不断出现,在机械手设计制造中应用自润滑材料、新型轻质高强度材料,能省去润滑,不污染环境,节省能源,使用寿命长。
4)机电一体化
自动化技术的核心目前是由“PLC-传感器-液压元件”组成典型的控制系统,使用反馈控制,校正使用中的各项问题,提高系统的可靠性。
1.4 课题的目的及意义
机械手是一种高度自动化的机器,可以更改机械手的运动路径来进行另外的工作,机械手可以应用在众多不适合人力的工作环境中,机械工业中,应用机械手的优点有:提高生产过程的自动化程度,提升效率;改善劳动条件,保障工人安全;减少人力,减小成本;完成人力不能完成的工作,应用范围广。
因此,工业蓬勃发展必将大量有效的应用机械手。
然而,在国内很多工厂的生产线上的工作仍由人工完成,工人劳动强度大,产品生产效率低,产品质量参差不齐,工人工作安全性低。因此,在ATV等速驱动半轴中间轴的生产线上就需要使用机器来代替人工,使用机械手进行轴的上下料来提高生产加工的工作效率,降低成本,使生产线成为柔性制造系统,适应现代自动化生产,所以针对具体生产工艺,利用机器人技术,设计一种上下料机械手进行搬运工作,来提高劳动生产率是很有必要的。
本次设计的机械手主要与机床、输送线组合,最终形成轴的完整生产线,实现上料、加工、下料的自动化。同时,本次设计能对大学本科四年的所学知识进行整合,进行驱动轴中间轴上下料机械手的设计,能够比较好地检验机械工程专业毕业生的理论水平,实践动手能力以及专业精神和态度。
1.5 本文的主要研究内容
本文设计的机械手主要是用于ATV等速驱动半轴中间轴的加工过程,使用机械手在生产线上对轴进行上下料,降低工人的劳动强度,提高产品生产效率,设计的机械手要能在复杂的环境中使用,且具有良好的定位精度,将工件放置在夹具上进行夹紧定位,鉴于以上要求和目的,本文主要包括以下几个方面:
(1)机械手方案设计:根据轴的加工工艺及生产线布局,设计一种合适的机械手,能完成工作,定位精度高,占用空间小,灵活性好。
(2)机械手各部件设计:合理的设计机械手各个部分的结构,根据负载设计合适的驱动缸,并进行部分部件的尺寸结构校核,要能达到使用要求。
(3)机械手建模分析:使用solidworks对设计好尺寸结构的机械手进行建模并将所有的零部件组装起来,对机械手的整体有直观的认识,然后对机械手整体进行有限元分析,保证机械手能满足强度要求和精度要求。
第2章 机械手方案设计
2.1 轴的分析
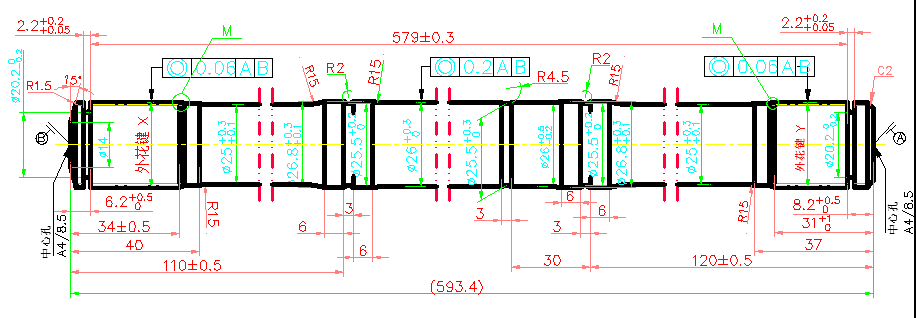
图2.1 等速驱动轴中间轴
2.1.1 零件的作用
ATV等速驱动轴是沙滩小车传动系统中的重要部件。它的主要作用是传递发动机的动力,将发动机输出的动力接收,然后通过两端花键位置输出,传递到汽车的前轮或是后轮,驱动汽车进行平稳高速的行驶。
该零件为汽车等速驱动轴中间轴,主要作用为传递运动和扭矩,使汽车获得前进的动力。
2.1.2 零件特点分析
中间轴零件是用来传递运动和扭矩的,要用在高速行驶中,就需要零件材料具有较强的刚度和强度,零件原材料选择40CrNiMoA。40CrNiMoA是合金钢,材料本身性能良好,为了继续提高材料性能,在加工过程中,还要加入调质工序。
零件是轴类零件,直径变化梯度小,因此毛坯可以选择使用棒料,加工方式选用车削。零件长径比约为1:20,是长轴类零件,为了保证加工时零件的刚度,加工时可以使用跟刀架辅助加工。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


