基于深度学习的自动避障小车设计毕业论文
2020-04-11 17:56:49
摘 要
随着深度学习成为计算机应用领域最热门的话题,人们对其应用的方向也越来越广泛。从上世纪六十年代出现的第一辆无人驾驶车辆开始,到近几年百度无人驾驶汽车的问世,智能车技术取得了重大的进展,特别是目前深度学习算法应用在车辆自动避障这一方面,不但具有重要的科研意义,同时还具有远大的市场前景。
由于智能小车这种轮式移动机器人具有体积小、重心低和易于操控等优点,本次毕业设计以智能小车为研究对象,对基于深度学习的自动避障小车系统进行研究和实现。不同于传统的红外和超声波避障小车,论文采用Socket框架将Darknet-YOLOv3深度学习图像识别框架和树莓派智能小车结合,完成了基于深度学习的自动避障小车设计。
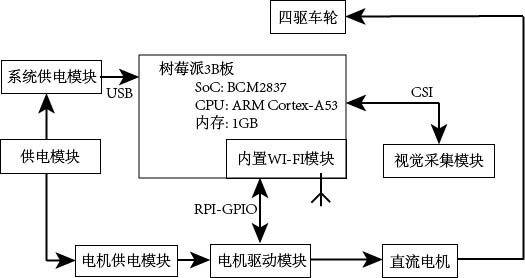
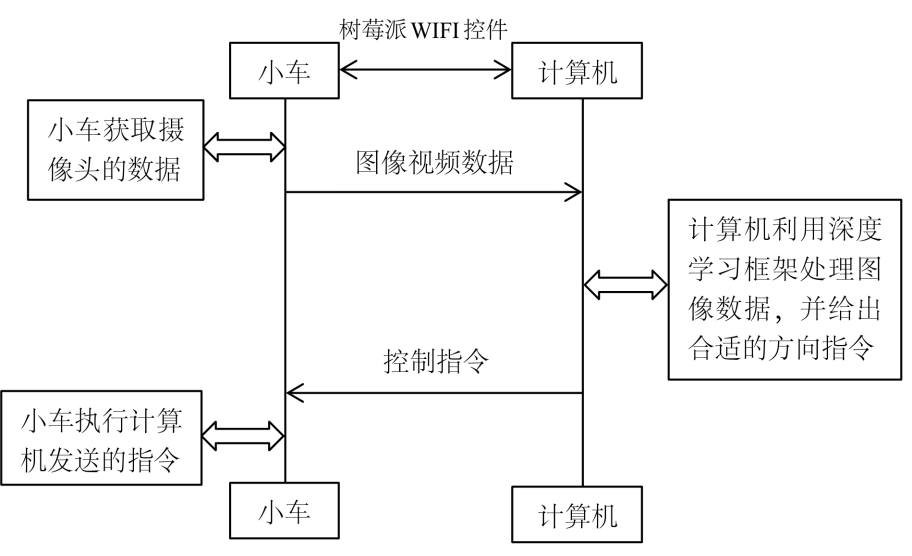
整个自动避障小车系统的设计内容为:利用树莓派CSI单目CMOS摄像头对小车所处环境进行拍摄,并将图像存储在搭载Linux系统的树莓派上;通过其开启Socket Server,接收PC控制端发来的指令,也将树莓派的图片发送给PC控制端,然后利用深度学习算法对障碍物进行识别、分类;再将识别结果应用到避障中,实现小车的实时避障。
本次设计的创新点体现在:目标识别的准确性和及时性能够达到较高的实时响应要求。
关键词:深度学习;自动避障;python3;树莓派3B
Abstract
As deep learning has become the hottest topic in computer applications, people have become more and more widely used. From the first unmanned vehicle that appeared in the 1960s, to the advent of Baidu unmanned vehicles in recent years, smart car technology has made significant progress, especially in the current application of deep learning algorithms in vehicle automatic obstacle avoidance. On the one hand, it has important scientific significance, but also has a great market prospect.
Because the intelligent mobile vehicle has such advantages as small size, low center of gravity, and ease of manipulation, this graduation project takes the smart car as the research object, and studies and implements the automatic obstacle avoidance car system based on deep learning. Different from the traditional infrared and ultrasonic obstacle avoidance vehicles, the paper uses the Socket framework to combine the Darknet-YOLOv3 deep learning image recognition framework and the Raspberry Pi smart car to complete the automatic obstacle avoidance car design based on deep learning.
The design content of the entire automatic obstacle avoidance car system is: using the Raspberry Pi CSI monocular CMOS camera to take pictures of the environment in which the car is located, and store the images on the Raspberry Pi equipped with a Linux system; and open the Socket Server through it to receive the PC. The instruction sent by the control terminal also sends the picture of the Raspberry Pi to the PC control terminal, and then uses the deep learning algorithm to identify and classify the obstacles; then the recognition result is applied to the obstacle avoidance to realize the obstacle avoidance of the car in real time.
The innovation of this design is reflected in the fact that the accuracy and timeliness of target recognition can achieve high real-time response requirements.
Key Words:deep learning; automatic obstacle avoidance; python3; Raspberry Pi 3B
目 录
第1章 绪论 1
1.1 研究意义及背景 1
1.2 国内外研究现状 1
1.2.1 智能车的国内外研究现状 1
1.2.2 深度学习的国内外研究现状 2
1.2.3 避障规划的国内外研究现状 3
1.3 课题研究的主要内容和目标 4
1.4 论文组织结构 4
第2章 设计方案说明 5
2.1 需求分析 5
2.2 硬件设计方案 5
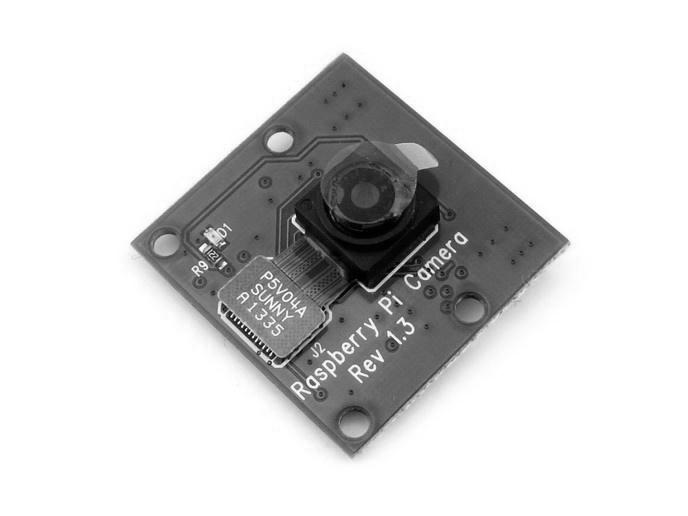
2.2.1 智能小车视觉采集部分硬件设计 6
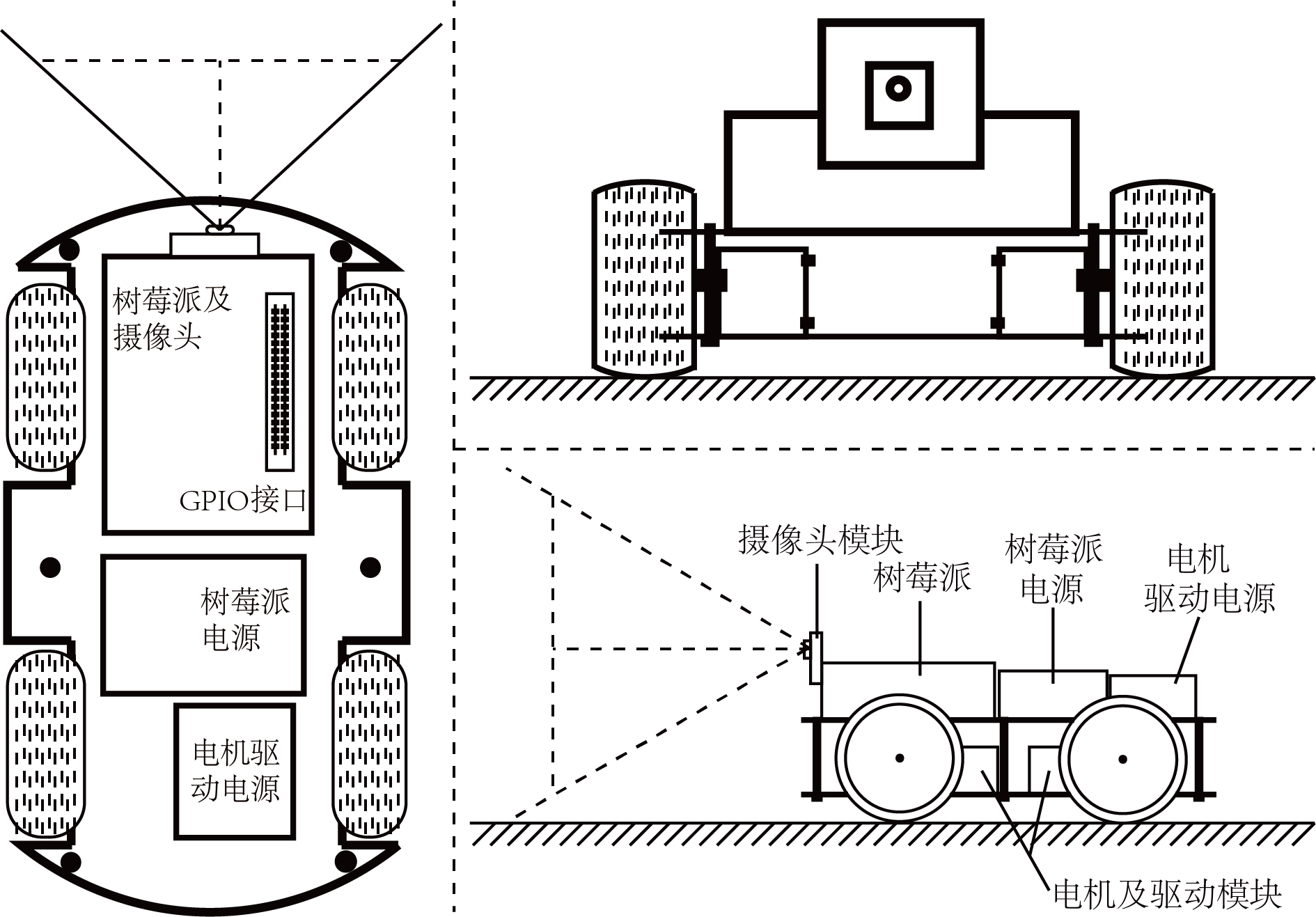
2.2.2 智能小车主体部分硬件的总体设计 7
2.3 程序设计方案 7
2.3.1 图像识别方式 8
2.3.2 数据通信方式 9
第3章 基于深度学习的自动避障小车硬件电路设计 11
3.1 硬件平台 11
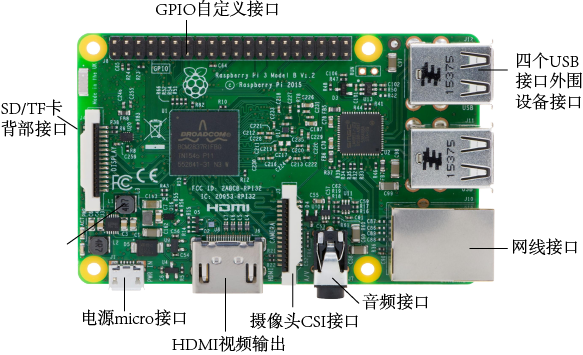
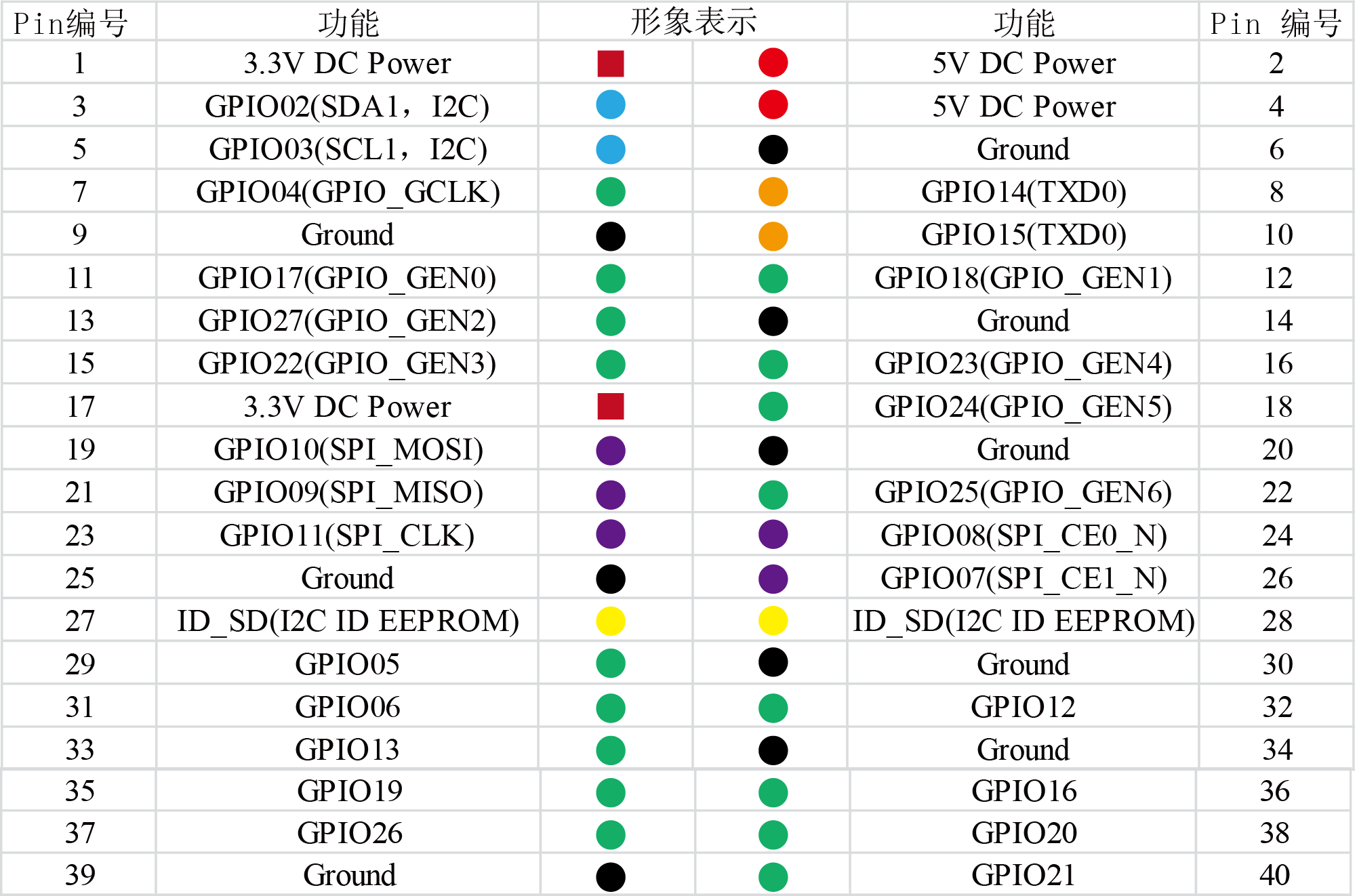
3.1.1 GPIO接口 11
3.1.2 CSI接口 12
3.2 电机驱动及电机模块 12
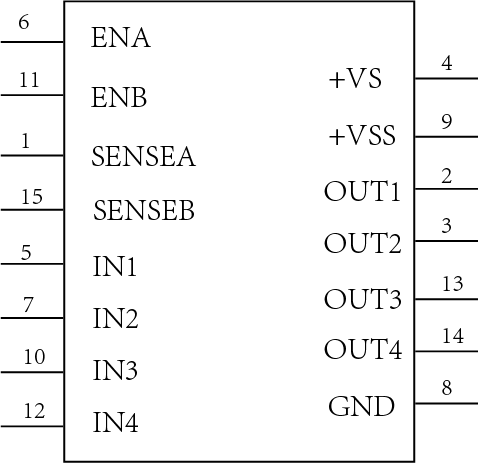
3.2.1 L298N电机驱动 12
3.2.2 电机 13
3.3 电源供电模块 13
第4章 基于深度学习的自动避障小车程序系统设计 15
4.1 YOLOv3卷积神经网络模型 15
4.1.1 卷积神经网络 15
4.1.2 GoogLeNet模型 16
4.1.3 YOLOv3网络模型 16
4.2 Socket通信程序模块 18
4.2.1 TCP三次“握手”协议 19
4.2.2 Python Socket创建 20
4.3 小车运动控制 22
4.3.1 Motion程序框架 22
4.3.2 避障程序框架 23
4.3.3 树莓派GPIO控制程序设计 24
第5章 综合配置与测试 26
5.1 系统运行环境配置 26
5.1.1 开发环境配置 26
5.1.2 树莓派摄像头模块测试 26
5.1.3 Motion模块配置 26
5.2 YOLOv3图像识别测试与分析 27
5.3 小车运动测试 29
5.3.1 智能小车方向测试 29
5.3.2 智能小车避障测试 29
第6章 总结与展望 31
6.1 总结 31
6.2 展望 31
参考文献 32
致 谢 34
第1章 绪论
1.1 研究意义及背景
随着《中国制造2025》的提出,新一轮科技革命和产业革命已经到来。围绕汽车、飞机和船舶相关方面的智能机器人应用需求必将不断增长,因此积极开发新产品,促进此类机器人标准化、模块化发展,必将成为未来一段时间的研究热点,也必将使科技技术创新在时代发展的过程中将呈现出越来越突出的作用。
智能小车避障是进行人工智能研究的重要方法,通过研究小车避障的人工智能算法,既能节省研究成本,又能对当前最新的无人驾驶需要的核心技术进行基础性研究,是当前比较流行的方式。
目前,智能小车的研究成果是通过各种传感器、测量器等来获取环境的信息,然后利用人工智能技术进行独立思维、学习、识别、推理,并做出判断和决策,使小车能自主行动并实现预定目标。
深度学习是当前人工智能算法的典型代表之一,目前处于快速发展阶段,将其作为智能小车的避障方法,是当前研究的主流形式。为此,本文将对基于深度学习的自动小车避碰系统进行设计和试验,探索智能避障的新方法。
1.2 国内外研究现状
智能小车作为一种多轮驱动的智能机器人,又被称为轮式移动机器人,它具有体积小、重心低、运动灵活、操控简单等优点。自上世纪六十年代以来移动机器人产业不断发展,人们对于此类机器人的应用要求也从原来仅限于做一些简单的工作,慢慢地变成让机器人智能化,与周围环境产生交互,并做出自主响应。具体来说,目前,智能小车是一个具有感知环境、路径规划、决策运行速度和方向等功能的综合系统。通俗的说,就是要实现其在无人类主动干涉的情况下,自动、安全且有效地完成给予的指令。
在近十年间,深度学习理论得到了很大的发展,从模拟人脑的思维方式出发,它与智能小车之间的应用结合也为其自身的发展提供了新思路。
1.2.1 智能车的国内外研究现状
上世纪五十年代国外开始研究智能车辆,具体发展过程可以分成初始阶段、有效研究阶段和大规模系统研究阶段。第一阶段,智能车辆研究的初始阶段。1954年,美国巴雷特公司研发了世界上第一个AGVS(自动导引车系统),它是无人驾驶的雏形,该系统是一个基于拖车的货运平台。早期对于AGVS的开发是为了提高仓储和运输的自动化水平,但是其适用范围难以满足货物运输之外的应用。第二阶段,欧美国家开始对智能汽车开始了有效地研究。1986年,在欧洲,政府开始普罗米修斯计划;1996年,在日本,日本政府为加快智能汽车的发展,成立巡航、辅助驾驶学院,以解决车辆自动导航的方法;1995年,在美国,美国政府出资成立了国家公路系统,用于研究并系统性地论证智能汽车发展的可能性,最终起到了重要的促进作用。第三阶段基本上是从上世纪九十年代末开始,智能车进入大规模研究阶段。比如,马斯克的特斯拉汽车和谷歌团队目前研究的无人车,都是现阶段智能车发展的重要方向。
随着我国改革开放政策的不断深化,经济得到快速发展,国内汽车行业蓬勃发展。车辆相关应用在近几年里,需求不断增长。国内各高校投入的研发资金也相当可观,成果显著,比如说基于TX1智能小车研究、关于ROS机器人程序设计的研究、“中华牌”月球车等。
美国电气和电子工程师协会(IEEE)预测,本世纪初,无人车必将进入普通家庭,实现以往科幻片中的情景。
1.2.2 深度学习的国内外研究现状
近几年深度学习发展迅猛,尤其Google AlphaGo(谷歌阿尔法狗)的围棋大战轰动一时。一定程度上,促进了深度学习的研究和发展。
国内深度学习相关研究始于世纪之交,但在当时国内并没有学者对深度学习理论进行概括和总结,一直到2005年才有学者发表较为全面、系统的研究论文。此后十年,深度学习技术在国内的研究可以简单概括为以下4个方面:①关于深度学习的理论认识研究;②关于深度学习的影响因素研究;③关于课堂教学中深度学习研究;④关于信息技术支撑下的深度学习研究。
2012年国内互联网领军企业百度公司将深度学习最新技术成果应用到人脸识别和自然图像识别上,并推出相应的产品。2018年国内通信行业巨头华为公司推出的旗舰手机P20 pro,就是搭载具有AI智能算法的SOC芯片。
深度学习的理论研究始于上世纪四十年代中期,神经科学家麦卡洛克(W.S.McCilloch,如图1.1)和数学家皮兹(W.Pitts,如图1.2)在《数学生物物理学公告》上发表论文《神经活动中内在思想的逻辑演算》(A Logical Calculus of the Ideas Immanent in Nervous Activity)。建立了神经网络和数学模型,按照生物神经元的结构和工作原理构造出来的一个抽象和简化了的模型,也就诞生了所谓的“模拟大脑”,深度学习的大门由此开启。
国外学者费伦斯·马顿(Ference Marton)从学生阅读方式入手,研究学生阅读过程中采用的方法。在长达20年的研究后,1976年对外公布出研究结果,并首次提出深度学习(Deep learning)和浅层学习(Surface learning)的概念。纵观科学发展史,无疑都是充满曲折的,深度学习也毫不例外。上世纪七十年代到八十年代末,深度学习的研究停滞不前。直到1986年,神经网络之父杰弗里·希尔顿(Geoffrey Hinton)发明了适用于多层感知器的BP神经网络算法,才有效解决了深度学习中非线性分类和学习问题,这也为后来深度学习的发展奠定了基础。

图1.1 神经科学家麦卡洛克 图1.2 数学家皮兹
1.2.3 避障规划的国内外研究现状
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


