无人艇航向控制系统研究毕业论文
2020-04-12 08:46:20
摘 要
无人艇具有体积小,流动性高,速度快等特点,广泛应用于搜索和救援,泄漏收集,监视,放置网络,测深图创建,运输,勘探任务,环境监测,海洋调查,沿海和内陆监测等,并且在各种应用中越来越受到重视。由于受到海风,波浪,海流等海洋环境的干扰,无人艇在航行时将不可避免地偏离原来的航向,而精确的航向控制是解决轨迹跟踪,自主导航和避撞等问题的先决条件,因此无人艇航向控制器的设计是控制理论和控制工程共同关心的问题。
PID控制是航向控制的有效方式,但是传统及改进的PID控制已经越来越不能满足人们对无人艇精准快速控制的要求,因此除了利用优化算法在线优化PID控制器参数的研究外,如今已有多种智能控制算法被应用于航向控制系统研究。
由于PID控制器的结构和参数调整简单,可靠性高,成本效益高等优点,因此仍被广泛应用于各大工业控制领域,其研究作用不可忽视。本文以无人艇为研究对象,对其建模、控制和系统仿真进行了研究。
首先,本文介绍了日本学者提出的无人艇在静水域的水面二阶运动方程,并以此为基础再考虑到无人艇在水面航行过程中,受到的动力系数以及阻力系数会随着航速的大小而有所改变,即无人艇具有时变性、非线性和不确定性的特点,对无人艇模型在不同航度下分别进行了离线模型参数辨识。
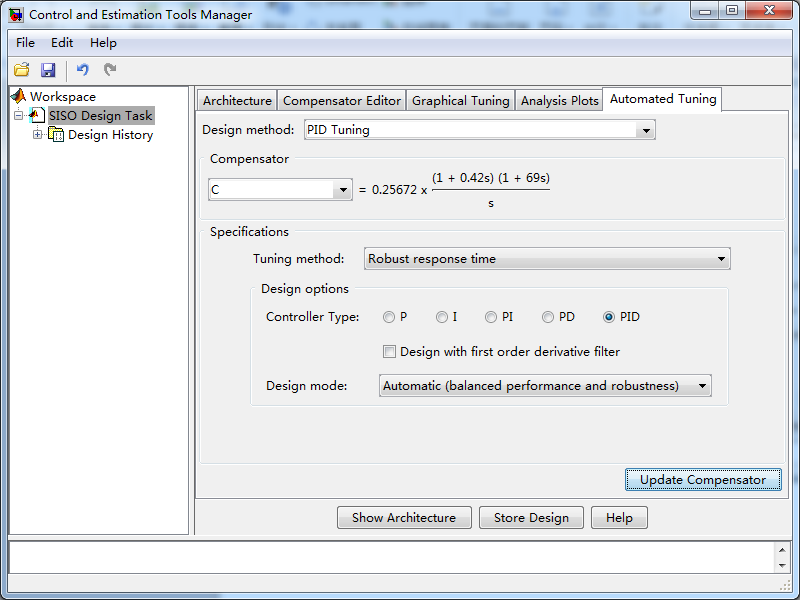
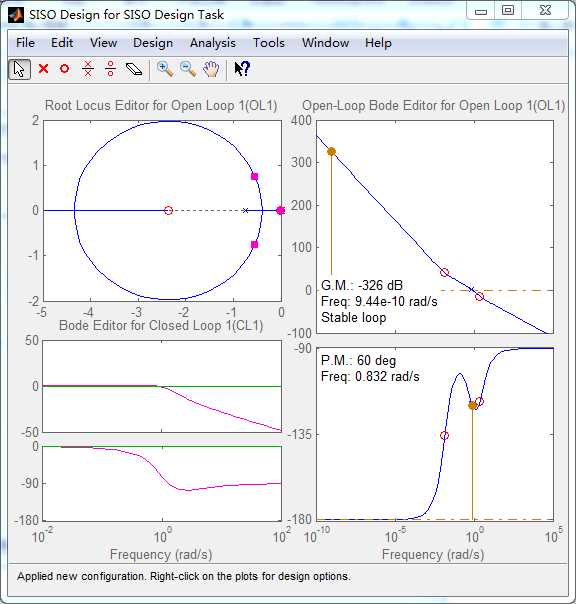
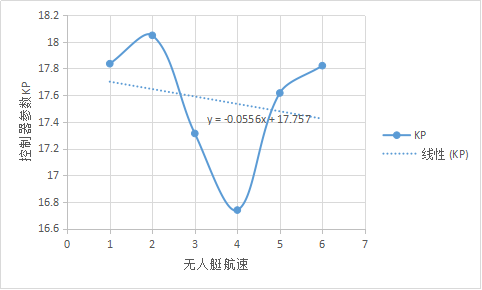
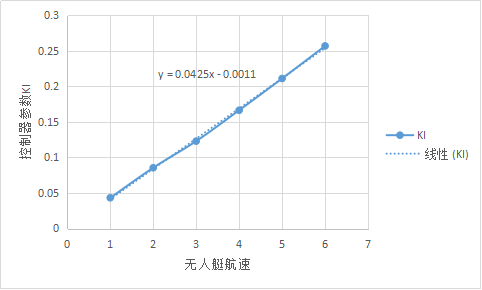
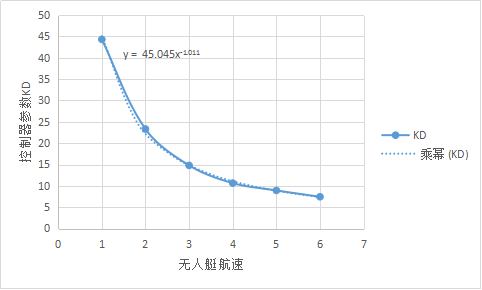
然后,本文设计了无人艇航向控制系统的控制策略,采用了非线性变参数PID控制的思想,并在已知被控对象模型的情况下,采用零极点配置法分别整定出各个航速下无人艇模型对应的最优PID控制器参数,并使用曲线拟合控制器参数跟随无人艇模型航速的变化关系。此外还借鉴了基于偏差的变参数PID控制策略的思想,对偏差较大情况下的控制器参数进行了优化。
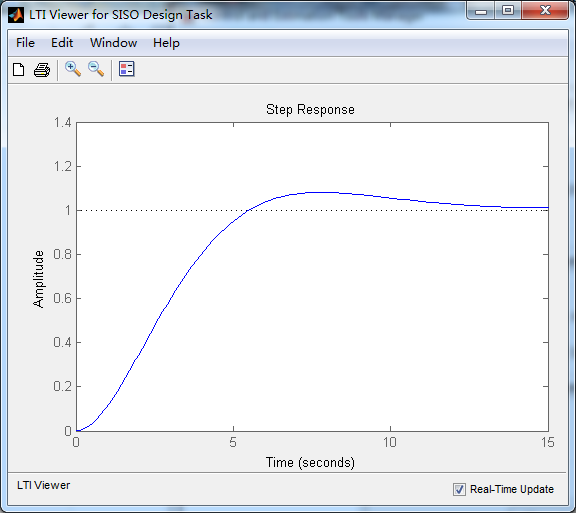
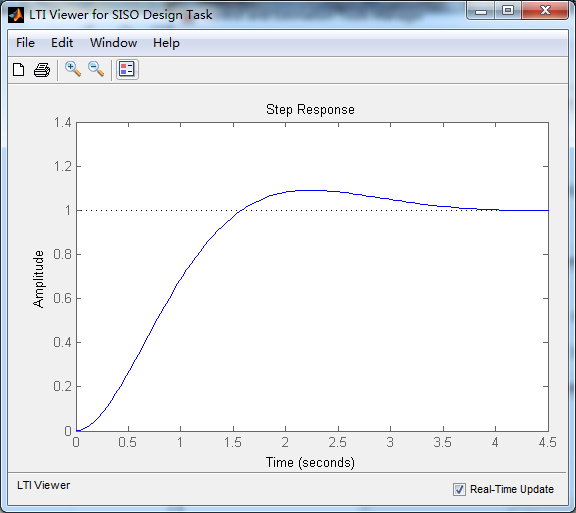
最后,本文基于MATLAB/SIMULINK平台对所设计的控制器参数跟随无人艇航度变化而变化的非线性变参数PID无人艇航向控制系统进行了模拟实现和仿真运行试验。仿真结果表明该非线性变参数PID控制器相比固定参数PID控制器具有明显的优越性。
关键词:无人艇;航向控制器;变参数PID;零极点配置法
Abstract
Unmanned boats are characterized by small size, high mobility, and high speed. They are widely used in search and rescue, leakage collection, surveillance, placement networks, bathymetric map creation, transportation, exploration missions, environmental monitoring, oceanographic surveys, coastal and intra- Land monitoring and so on, and more and more attention in various applications. Due to the disturbance of the marine environment such as sea breeze, waves, currents, etc., unmanned craft will inevitably deviate from the original heading during navigation, and precise heading control is a prerequisite for solving problems such as trajectory tracking, autonomous navigation, and collision avoidance. The design of the unmanned heading controller is a common concern for control theory and control engineering.
PID control is an effective way of heading control, but the traditional and improved PID control has been unable to meet people's requirements for precise and rapid control of unmanned boats. Therefore, in addition to the study of optimizing PID controller parameters online using optimization algorithms, A variety of intelligent control algorithms are applied to the research of the heading control system.
Because of its simple structure, parameters adjustment, high reliability, and high cost-effectiveness, the PID controller is still widely used in all major industrial control fields, and its research role can not be ignored. This article takes the unmanned boat as the research object and studies its modeling, control and system simulation.
Firstly, this paper introduces the second-order equations of motion for unmanned watercraft in still waters proposed by Japanese scholars. Based on this, it also considers that the unbalanced speed and drag coefficient of the unmanned hull will increase with speed. The size has changed, that is, the unmanned boat has characteristics of time-variation, nonlinearity, and uncertainty, and the unmanned boat model has been identified by offline model parameters at different voyages.
Then, the control strategy of the unmanned boat heading control system is designed and the idea of nonlinear variable parameter PID control is adopted. Under the condition of known controlled object model, the zero-pole configuration method is used to determine the speed at each speed. The man-boat model corresponds to the optimal PID controller parameters and uses the curve-fit controller parameters to follow the changing relationship of the speed of the unmanned model. In addition, the idea of variable-parameter PID control strategy based on deviation is also taken into consideration, and the controller parameters under large deviation are optimized.
Finally, based on the MATLAB/SIMULINK platform, this paper simulates and simulates the nonlinear variable-parameter PID unmanned ship heading control system, which is designed according to the change of unmanned rudder voyage parameters. The simulation results show that the nonlinear variable parameter PID controller has obvious advantages over the fixed parameter PID controller.
Key Words:unmanned boat; course controller; variable parameter PID; zero-pole configuration method
目录
摘 要 I
Abstract II
第1章 绪论 1
1.1 无人艇航向控制系统研究背景 1
1.2 无人艇航向控制系统研究现状 1
1.3 PID控制器研究现状 2
1.4 PID控制器原理 2
1.5 关于本研究 3
1.6 本章小结 4
第2章 无人艇模型辨识 5
2.1 无人艇模型辨识方法 5
2.1.1 无人艇模型参数K的辨识 5
2.1.2 无人艇模型参数T的辨识 6
2.2 无人艇模型参数辨识步骤 7
2.2.1 参数K的辨识 8
2.2.2 参数T的辨识 10
2.3 本章小结 12
第3章 无人艇航向控制器设计 13
3.1 PID控制器参数整定方法 13
3.1.1 零极点配置法原理 13
3.1.2 非线性变参数设计 14
3.2 PID控制器参数的整定步骤 14
3.3 本章小结 20
第4章 非线性变参数PID控制器的实现 21
4.1 控制器参数的曲线拟合 21
4.2 变参数控制器的程序实现 22
4.3 本章小结 29
第5章 仿真试验 30
5.1 效果验证 30
5.2 对比分析 33
5.3 本章小结 36
第6章 总结与展望 37
6.1 工作总结 37
6.2 工作展望 37
参考文献 38
致谢 40
第1章 绪论
1.1 无人艇航向控制系统研究背景
USV(无人艇)是Unmanned surface vehicle(无人水面艇)的简称[1],是一种能够自主航行的水面无人小型船舶[2]。无人艇具有体积小,流动性高,速度快等特点,广泛应用于搜索和救援[3],泄漏收集,监视,放置网络,测深图创建,运输,勘探任务,环境监测,海洋调查,沿海和内陆监测等,并在各种应用中越来越受到重视。人们对运输服务质量要求的不断增加以及对更高安全水平的需求一直是推动船舶航行系统控制技术不断提高的驱动力。通常,无人艇在海上航行,必定会受到海洋环境因素诸如海风、波浪、水流等的干扰,从而偏离期望的航向[4],因此航向控制器的设计是无人艇运动控制的一个重要研究课题,它不仅与经济性和安全性USV导航有关,而且也是自动避撞,轨迹跟踪和稳定航行的基础[5],因为精准的航向控制有利于躲避障碍物并防止事故的发生。另一方面,优良的航向控制器需要较少的控制力,从而使其执行器能够有较长的使用寿命。无人艇在水面航行的过程中,其受到的动力系数以及阻力系数会随着航速的大小而有所改变,即无人艇的运动系统具有时变性、非线性和不确定性的特点[6],同时,由于无人艇在航行过程中受海洋环境干扰力的影响较大[7],因此要建立精确的无人艇动力学模型非常困难[8]。这些都导致无人艇的航向控制相当复杂。而航向控制系统的控制算法必须能够很好地适应被控系统模型参数的变化[9]。本研宄的目的就是针对无人艇数学模型参数的不确定性、非线性问题,设计出控制器参数能够根据无人艇模型参数变化而变化的无人艇航向自动控制系统。
1.2 无人艇航向控制系统研究现状
在无人水面艇的研究领域,美国遥遥领先于世界各国。在功能方面,无人水面艇近几年有了很大突破,以刚性充气艇为平台的无人艇在大型舰船上进行布放和回收己经成为可能,并且具备了远洋作战的能力。以往的无人艇只能够的完成单一的反水雷任务,而如今的无人艇在搭载不同的任务载荷的情况下,可以通过远程操控、预先制定程序等方式完成监视、谍报搜集、排雷、武装掩护和精准打击等多种复杂的军事任务。而当下中国对无人水面艇的研究方面尚处于起步阶段。虽然已经取得了一些值得肯定的研究成果,但要想完成高速、智能等方面的集成应用却还远远不够,与国外相对比还有很大差距[4]。
为了减少人们在危险环境中人为干预,以及实现更精确和更高效的控制,目前在水面无人艇航向控制方面,国内外己经有在研究较先进的智能控制策略。随着自动控制科学在理论和技术上的不断进步,无人艇航向控制技术已经从传统的PID控制技术,自适应控制技术,发展到智能控制技术[10]。PID控制器的设计不完全依赖于被控对象的模型[11],通过实际调试效果和经验整定控制器系数即可获得较好的控制效果[12]。但是常规固定系数的PID航向控制器只能满足某一种航速或是海况下的航向控制,其大幅度、高频率的操舵会给无人艇推进产生明显的附加阻力,并最终导致舵机较快磨损。自适应自动舵[13,14]的显著特点是能够连续自动调整或辨识控制器参数以适应无人艇和环境条件的动态改变[12],但是造成控制器设计非常复杂,在实际应用中不易实现。智能控制的显著特点是控制器的设计主要依靠设计者的经验而不依靠系统模型,对于非线性、不确定系统的控制效果良好。智能控制算法如神经网络[15]、模糊控制[16]、专家系统等智能都依赖于设计者的学习与推理能力,虽然基于这些算法的航向控制系统能够不依赖于无人艇的运动数学模型,但其自身参数的设计却是一个难题[17]。为此一些研究者还提出了将内模控制[17],反步自适应滑模控制[8]和基于分布算法的精英估计算法[18]等应用于无人艇的航向控制。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


