电力线路巡检无人机双目视觉导航方法研究毕业论文
2020-04-12 08:46:34
摘 要
电力线路巡检工作保证了保障了国家电网运行的安全性和可靠性,是国家电网很重要的一环。从古至今,电力线路巡线的方式一直都在变化,从以前的地面人工目测法对电力线路巡检到后来的直升机载人巡检技术,再到后来的无人直升机进行巡线工作,以及现在正在测试中的巡检机器人和四旋翼飞机巡检技术。随着科技的日益发展,电力巡检工作变得越来越智能化、迅速以及精准。
首先,本文介绍了无人机电力线路巡检的基本组成,分析了目前电力线路巡检的优点和缺点,根据目前存在的一些缺点进行改进设计出了一款搭载双目视觉传感器的无人机电力线路巡检设备,以实现更加智能化的电力电路巡检工作。
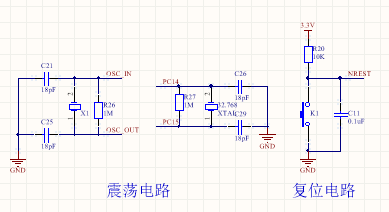
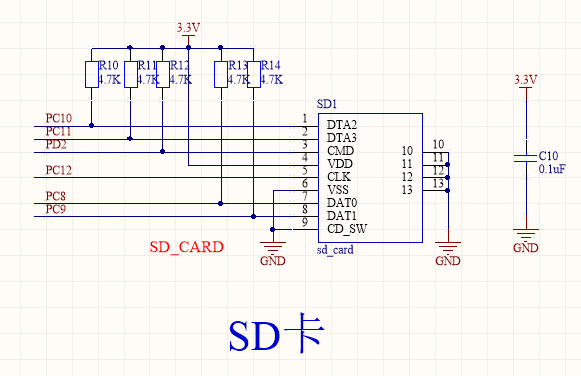
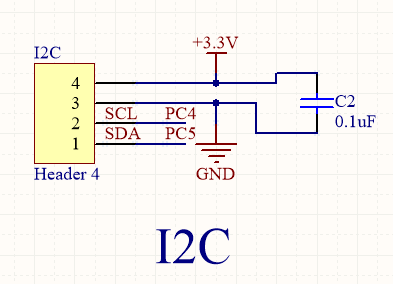
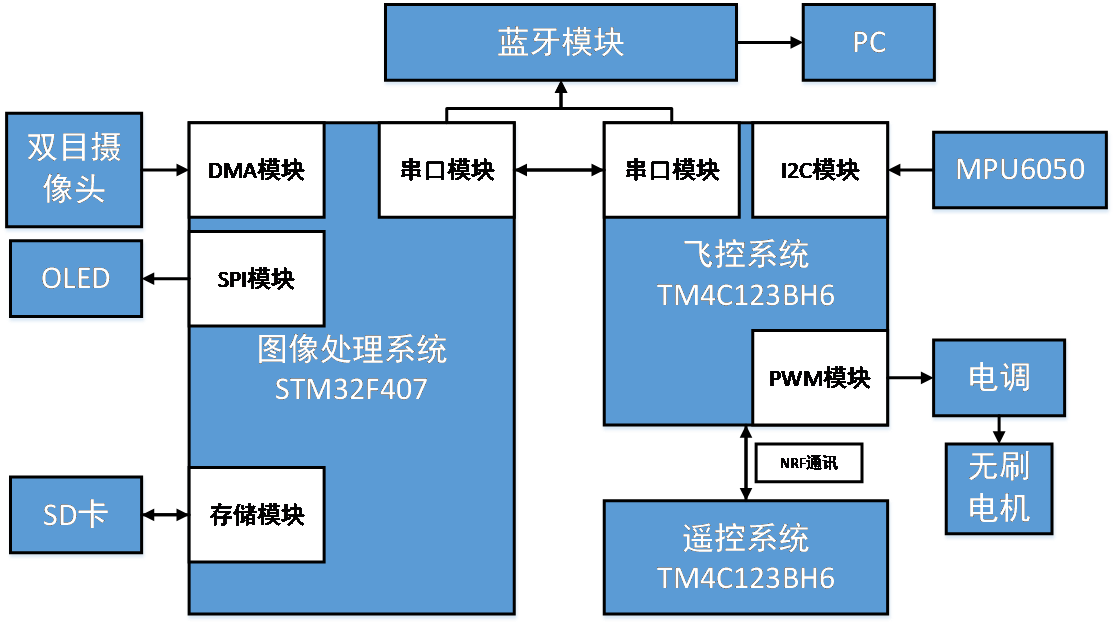
其次,本文建立了一套基于无人机的电力线路巡检系统硬件结构。其硬件结构采用模块化设计,主要由图像处理系统和飞控系统构成。图像处理系统包括DMA模块、串口模块、SPI模块、存储模块,飞控系统包括串口模块、模块和PWM模块,并对两个系统协同作用的方法和电路结构进行了分析和说明。
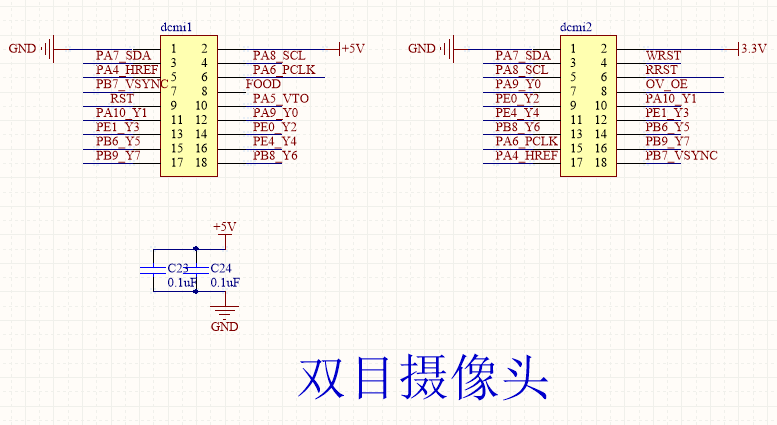
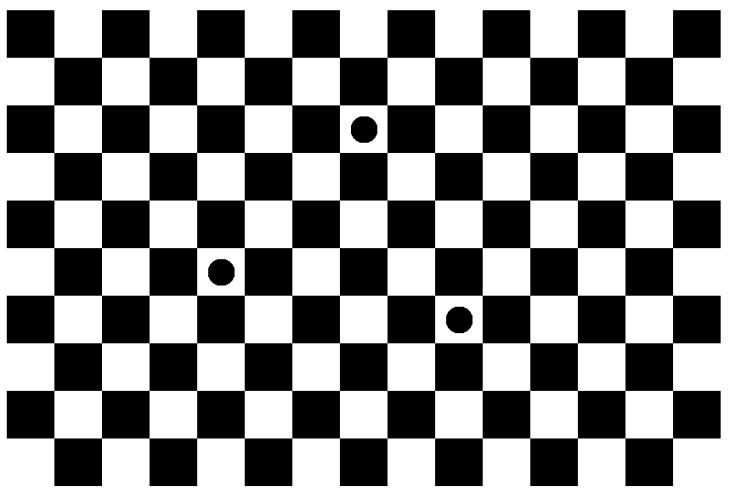
然后,设计了双目视觉图像的处理方法,通过对双目摄像头进行标定、左右图像的矫正、立体匹配、三角测量、高斯滤波、中值滤波、二值化处理、边缘检测等一系列操作,从左右图像中得到输电线路的轮廓,找到输电线路周围可能存在的安全隐患。
最后,本文设计了无人机导航的控制策略。通过双机通讯获取图像处理后的数据,由单片机定时器分配每个环节的时钟周期,将角速度内环、角度外环、输电线位置环、飞机高度环这四环按运行周期由低到高的方式利用PID算法进行串联,组成多级PID算法的闭环控制系统,使无人机快速而稳定地沿着输电线路进行导航和巡检工作。
关键词: 立体匹配;边缘检测;串级PID算法;电力线路巡检
Abstract
The patrol work of the power line has ensured the safety and reliability of the operation of the national grid and is an important part of the national grid. From ancient times to the present, the way of patrolling the power line has been changing. From the previous ground-based artificial visual inspection method, the power line was patrolled to the subsequent helicopter manned inspection technology, and then the unmanned helicopters were patrolled. The patrol robots and four-rotor aircraft inspection technology are now being tested. With the development of science and technology, power inspection work has become more intelligent, rapid and accurate.
First of all, this paper introduces the basic components of UAV power line inspection, analyzes the advantages and disadvantages of current power line inspection, and improves the design of a UAV equipped with binocular vision sensors based on the existing shortcomings. Power line inspection equipment to achieve more intelligent power circuit inspection work.
Secondly, this paper establishes a UAV based power line inspection system hardware structure. Its hardware structure adopts the modular design, mainly consists of image processing system and flight control system. The image processing system includes DMA module, serial port module, SPI module and memory module. The flight control system includes serial port module, I^2 C module and PWM module. The method and circuit structure of the two systems are analyzed and explained.
Then, a binocular vision image processing method was designed to perform binocular camera calibration, left and right image correction, stereo matching, triangulation, Gaussian filtering, median filtering, binarization, and edge detection. The contours of the transmission lines are obtained from the left and right images and potential safety hazards around the transmission lines can be found.
Finally, this paper designs the control strategy for UAV navigation. Through the dual-computer communication to obtain image-processed data, a single-chip timer allocates clock cycles for each link, and the four loops of the angular velocity inner ring, the outer ring of the angle, the power line position loop, and the aircraft height loop are run from low to high according to the operation cycle. The method uses a PID algorithm to connect in series to form a closed-loop control system with a multi-level PID algorithm, enabling the drone to quickly and steadily navigate and inspect along the transmission line.
Key Words:Stereo matching; Edge detection; Cascade PID algorithm; Power line inspection
目 录
第一章 绪论 1
1.1 研究背景 1
1.2 目前国内外现状 2
1.2.1 国外现状 2
1.2.2 国内现状 3
1.3 本文主要研究内容 5
第二章 导航系统硬件设计 6
2.1 双目摄像头 6
2.2 嵌入式单片机 6
2.2.1 图像处理系统 6
2.2.2 四旋翼飞机飞控系统 9
2.3 四旋翼飞机结构 11
2.4 电力线路巡检无人机总体设计 11
2.5 本章小结 12
第三章 导航系统软件设计 13
3.1 图像处理方案设计 13
3.1.1 双目摄像头的标定及矫正 13
3.1.2 双目摄像头的立体匹配 14
3.1.3 双目摄像头的三角测量 15
3.1.4 图像处理得到输电线轮廓 15
3.2 无人机导航方案设计 17
3.2.1 姿态解算和PID算法 17
3.2.2 飞机程序运行流程 18
3.3 本章总结 19
第四章 双目视觉导航系统实验分析 20
4.1 室内设备测试 20
4.2 户外实地实验 21
4.3 飞机导航实验 25
4.4 本章总结 26
第五章 结论 27
参考文献 28
附录A 图像处理程序 30
附A1 图像处理主程序 30
附A2 图像处理滤波及二值化程序 33
附录B 四旋翼飞机程序 39
附B1 飞机主程序 39
附B2 飞机时序程序 39
附录C 嵌入式单片机原理图及PCB图 45
附C1 图像处理部分单片机系统 45
附C2 飞控系统 47
致谢 48
第一章 绪论
1.1 研究背景
电力线路的可靠运行对一个国家的经济发展起着不可忽视的作用,采用高压和超高压架空电力线路进行电力输送是长距离输配电力的主要方式,在这种方式下,电力线及杆塔附件长期暴露在自然环境中,受到各种自然力的作用,比如内部的电力负荷压力、电气设备老化、自然灾害、小动物引起等外部因素的影响[1]。这些自然因素都会持续性的破坏电力线路的可靠运行,如果不能够及时检测到这些潜在的隐患,对电力系统可能会造成不可估量的损失,所以电力公司需要对线路设备进行定期巡检,从而确保电力系统的安全、稳定和可靠运行。
纵观全球,许多地方都发生了大面积停电事故。2013年9月3日,委内瑞拉发生大面积停电,全国大部分地区受到了影响,这次事故主要是由于其中的一个变电站的防护网脱落掉在输电线上,而下雨使空气潮湿导致了短路故障的发生2012年7月30日,印度发生了大面积停电,印度北方境内的一座超高压变电站出现问题,导致部分输电线路和变电站过负荷,影响了约6亿人的用电[2]。2009年11月10日,巴西发生大面积停电,整个停电事故影响了巴西18个州的供电正常,而这次事故的主要是由于当天晚上的强降雨和雷电导致的。从上述事件可以看出电力线路巡检的重要性,目前我国电力系统还不够完善,安全性还没有达到很高的水准,所以保障电力系统供电的安全对于我国电力事业极为重要。人力巡检费时费力并且并没有很好的成效,主要是由于输电线高度太高,无法直观地观察问题,另外超高压电力线路穿越的地形复杂,给电力线路巡检造成了更大的困难,此外在冰雹、地震多发地带,更需要实时获取电力巡线的数据。
从1950年开始,各国部分地区开始利用直升机进行电力线路巡检工作。直升机巡检更加的安全和高效,不受地形限制的同时,还能发现人工巡检难以发现的隐蔽性问题,然而直升机巡检需要对飞行员进行严格的培训,特别是在恶劣环境下对飞行员来说有着极大的挑战[3]。对飞行员的要求太高以及飞行员的安全不能得到保障等因素,导致了载人直升机不能大规模的投入的电力线路巡检工作中。随着这几年来科学技术的发展,无人机引入电力巡检工作成为可能,无人机电力巡检技术结合了通讯、测控、遥感、计算机、传感器检测和自动化飞行控制等现代科技技术,对输电线路导地线、绝缘子等电力线路设备的运行状态进行全面和精确的检测。电力线路巡检无人机具有智能化以及自动化的特点,使得电力巡检工作变得更安全更有效率。无人机电力线路巡检技术的发展极有可能在未来取代人工电力线路巡检的工作。
将双目摄像头作为装配到无人机上的传感器,在实时获取巡检情况的同时,能够得到空间三维信息以及距离信息,使得在巡检工作中能够准确地得到故障位置的信息,进而进行全方位的缺陷、故障诊断。双目摄像的原理类似于人眼成像,它包含两个左右并行摄像头,在同一时间段内同步拍照,利用左右图片的差距进行计算,获得目标物体与定点之间的距离信息。采用双目视差理论获取传输线的场景能减少单眼视觉系统误报和漏报。目前,在四旋翼飞机上装设双目摄像头进行电力巡线检测,计算出危险因素的空间坐标和线路,将极大地提高输电线路日常巡查和异常应急处理的效率,大量节约巡线成本和降低劳动强度,使得电力供应设施更加可靠。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


