激光测距系统设计与仿真毕业论文
2020-04-12 08:47:26
摘 要
激光测距系统是使用激光作为光源,依靠测量激光发射与接收时间来确定与目标距离的测距系统,它有测量速度快、精度高和使用方便等优点,在军事和民用等领域都有广泛的应用。本文使用EDA技术,以Quartus II为平台,使用硬件描述语言VHDL设计一款工业用激光测距系统。整个系统由按键控制模块、传感检测模块、核心控制模块和显示模块构成。按键控制模块主要完成与用户之间的交互功能,传感检测模块发射激光、接收回波信号然后产生对后续模块的控制指令,核心控制模块实现计数和距离计算的功能,显示模块将距离结果使用动态扫描的方式进行显示。本文经过原理设计、仿真调试和优化改进之后,成功设计出能够对五十米内目标精确测距的激光测距系统。
关键词:激光测距;模块化;EDA
Abstract
Laser ranging system is a distance measuring system which uses laser as light source and depends on measuring laser emission and receiving time. It has many advantages, such as fast speed, high precision and easy to use. It is widely used in military and civil fields. In this paper, we use Quartus II as the platform and design an industrial laser ranging system using the hardware description language VHDL. The whole system is composed of key control module, sensor detection module, core control module and display module. The key control module mainly completes the interactive function with the user. The sensing detection module launches the laser, receives the echo signal and produces the control instruction to the follow-up module. The core control module realizes the function of counting and calculating the distance. The display module displays the distance result using the dynamic scanning mode. After the principle design, simulation debugging and optimization improvement, a laser ranging system capable of accurately locating the target within fifty meters is successfully designed.
Keywords: laser ranging; Modularization; EDA
目 录
第1章 绪论 1
1.1研究背景 1
1.2国内外研究现状 1
第2章 系统结构与方案设计 3
2.1系统结构 3
2.2方案设计 4
2.2.1测距方案 4
2.2.2显示方案 4
2.2.3软件选择 5
2.2.4语言选择 5
2.3小结 6
第3章 系统设计 7
3.1传感检测模块 7
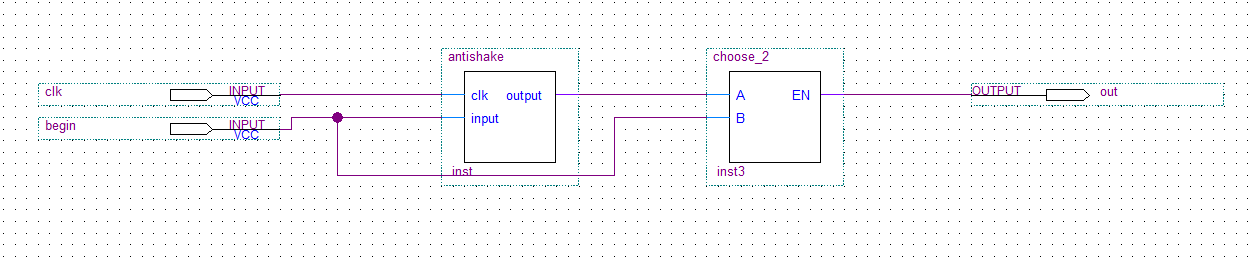
3.2按键控制模块 9
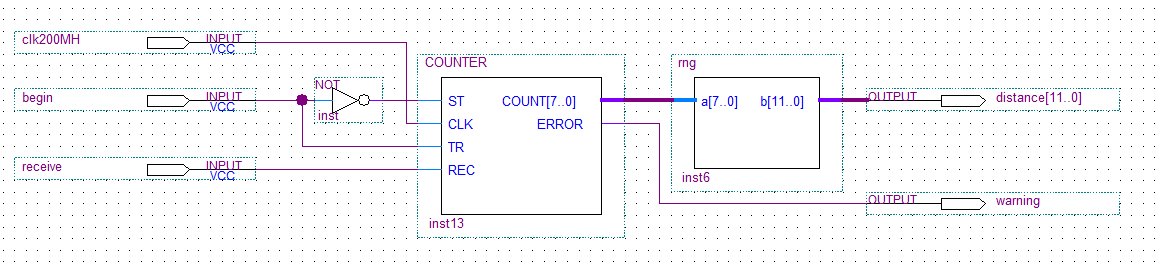
3.3核心控制模块 10
3.4显示模块 13
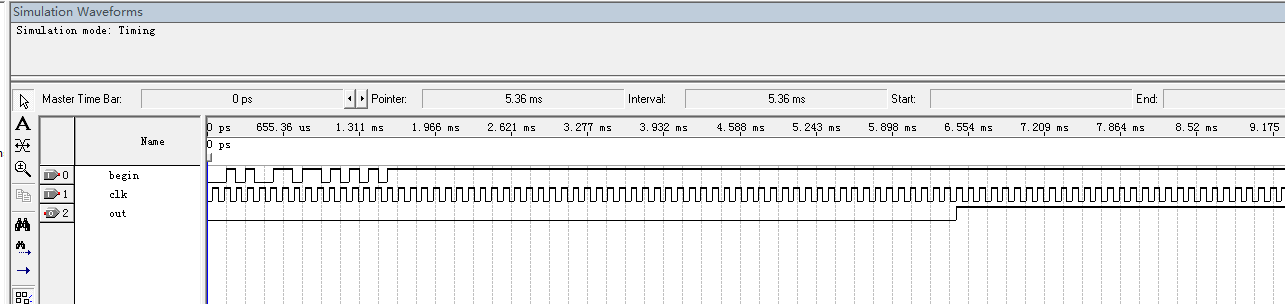
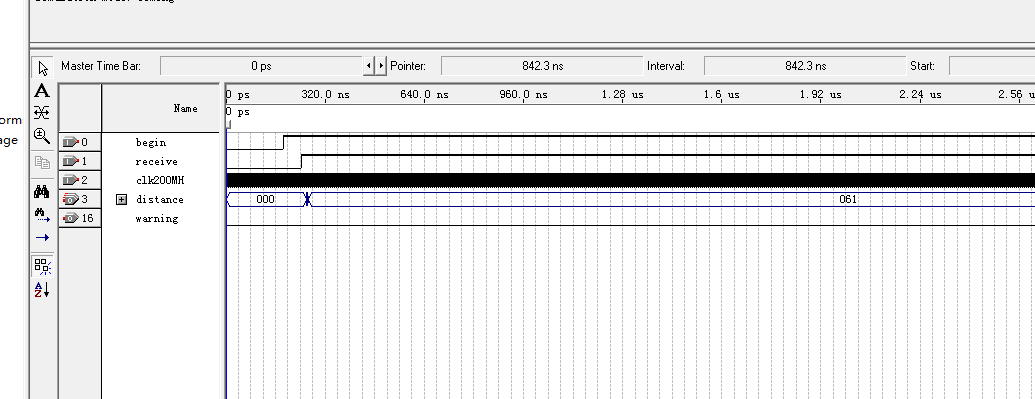
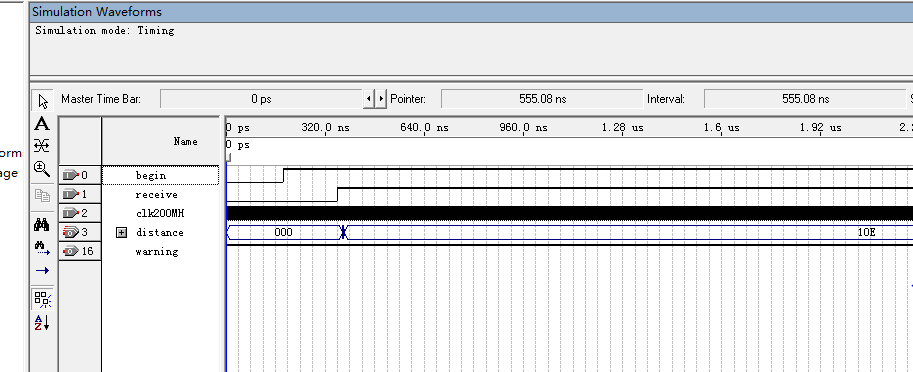
3.5系统仿真 15
3.6小结 18
第4章 总结与展望 19
4.1总结 19
4.2展望 19
参考文献 20
致 谢 21
附录A激光测距系统程序 22
第1章 绪论
1.1研究背景
无论何时,人类对距离掌控的需求从未断过。而且随着科技的发展,人类更迫切的需要能够快速准确测量距离的技术。激光测距技术就是一种高效又精确的测距技术。它是以激光这种自然界中不存在的光作为光源进行距离测量的技术。因为激光的单色性、相干性和方向性等性能比其他光源更好,所以激光测距技术无论在测距速度还是测量精度或者测量范围上都比其他测距技术优秀。它的远距离测距能够测得地球与月球距离,高精度测距的精度可以到达毫米级。
激光测距技术带给人类很多便利。现有的激光测距系统被大量的运用在军事、建设、测绘和医学等领域。在建设工作中,建筑施工、测绘等等都需要精准的测量距离,激光测距技术可以精确高速的测量这些数据,提高工作效率。而在军事领域,不但需要测距结果准确,更需要测量迅速。在战斗中目标可能不停运动,迅速测量出的结果才有价值,否则即使结果再准确也毫无用处。医学领域中很多治疗方法非常依赖激光测距技术的高精度测距,但同时也需要尽可能减少激光对人体造成的伤害。
本文从工业生产的角度出发对激光测距技术进行相关研究。现代工业的自动化的生产过程中有可能会出现一些安全事故,其中部分安全事故时由于人或异物进入危险区域造成的。为了防止安全事故的发生,需要对相关区域进行距离检测。激光测距系统测距速度快、体积小、不易受电磁干扰,因此本文的目标是使用EDA工具设计一款激光测距系统。其能够对生产过程中的需监控区域进行快速、密集的距离数据采集测量,并使用数码管显示测量结果,防止安全事故的发生。
1.2国内外研究现状
激光测距技术非常依赖激光发射装置的性能,所以激光测距技术的发展是在1960年第一台红宝石激光器出现之后才开始的。美国休斯飞机制造公司制作出了世界上第一台激光测距器,随后很多公司被激光测距技术的市场吸引,开始进行激光测距的研发工作。但是这一时期的激光测距器体积巨大,使用极其不方便,因此当时激光测距的应用范围较小。激光测距技术的广泛应用是在发达国家的大公司生产出半导体激光二极管之后。使用半导体激光二极管的激光测距仪相对于之前的产品有巨大的优势:体积小、可靠性高、成本低、安全性高还有控制方式简单等。有了可靠的光源后,激光测距技术突飞猛进,向着不同的方向多样化发展。目前国外的研究方向有两个。一是通过使用新型传感器或采用新技术等方法将激光测距仪在结构和功能上进行优化,使其体积更小、操作更方便。这一部分激光测距仪主要是民用。而另一个研究方向是更着重于低功率和安全性,这一研究方向又叫做人眼安全激光测距,即根据人眼安全性测试(人眼安全性的测试是由不同激光波长下的最大允许照射极值来限制的)来选择波长合适的激光,使其对人眼小伤害或无伤害。它们主要用于医学领域。目前已有的人眼安全激光测距产品主要使用1.54um和10.6um两种波长的激光。美国生产的斯米尔人眼安全激光测距仪就是一个代表性产品。
国内激光测距技术的研究开始于20世纪80年,发展到现在,在该领域已有了一定的成果。国内民用领域开发的各种激光测距仪主要用于工程建设中,因此主要提高了激光测距仪的可靠性和精度。例如:中科院上海光机所开发的便携式激光测距机、西南技术物理研究所研制出了半导体激光高度表。因为部分公司的产品主要面向平民,所以使用单片机为核心,将传感模块和信号处理部分使用简单逻辑电路来实现,大大降低了产品的价格。总体来说国内激光测距技术与国外的差距主要体现在人眼安全激光测距上。国内的部分研究院也在向着这个方向努力。
本文使用EDA工具设计激光测距系统,主要功能是对中短距离内的目标进行测距来防止人员或异物进入生产区域造成安全事故。相对于使用单片机加组合逻辑电路设计的激光测距器,本文设计的激光测距系统的硬件结构较为简单,而且更容易改动或者拓展相关功能。由于使用EDA工具进行设计,在设计过程中使用软件建模仿真,降低了设计的难度而且缩短了开发周期,降低了研发的时间成本。
第2章 系统结构与方案设计
2.1系统结构
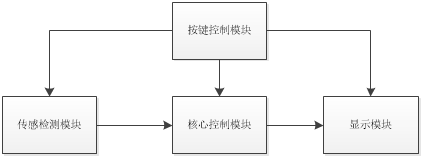
图2.1 系统框图
激光测距系统的系统框图如图2.1所示。
采用模块化设计的思想,整个系统划分为传感检测模块、核心控制模块、按键控制模块和显示模块四个模块。
传感检测模块是对传感器进行控制并且对接收到的反馈信号进行相关处理以便得到所需的信号形式的部分。在本文中,传感检测模块主要功能是发出相关控制信号以驱动激光发射器发射激光,在接收到反射回的激光后向其他模块发出控制信号。
核心控制模块主要由一个计数器和一个计算元件组成,主要的作用是接收传感检测模块的控制信号进行计数,以此来计算激光从发射到接收的时间,并且以此为依据在计算元件中将计数器得到的计数结果计算成激光测距仪与目标之间的距离,再将距离结果以二进制的形式输出给显示模块。因为本文是对五十米以内的目标进行测量,如果超出测量距离则对测量精度有影响,所以在核心控制模块中对是否超量程进行比较判断,再将结果以警告指示灯的形式传递给使用者。
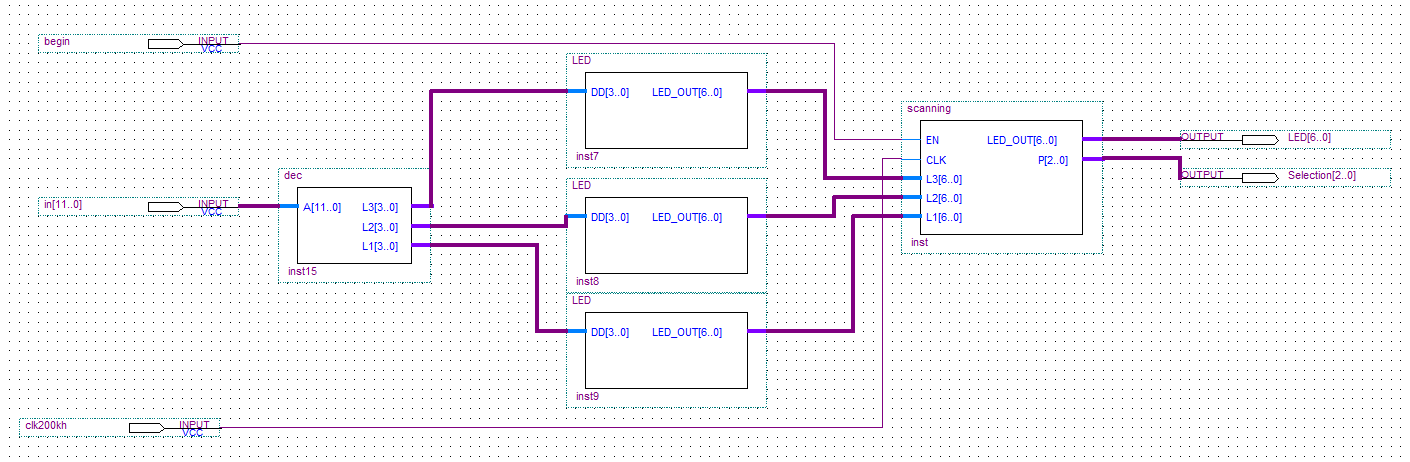
显示模块的主要作用是将核心控制模块计算出的距离信号进行译码并使用数码管输出。该模块在输出时分为三步,首先将接受到的来自核心控制模块的距离信号按十进制的个十百位拆分,分别以四位二进制输出个位、十位和百位。然后再将个十百位分别译码。译码后再使用动态扫描的方法驱动三个数码管进行显示。
本文的目的是使用EDA工具设计激光测距系统,该系统的功能是对中短距离内的目标进行测距来防止人员或异物进入生产区域造成安全事故。将其细化总结为以下功能:
(1)根据用户的控制,对五十米以内目标的实现精确测距。
(2)判断目标距离是否超出量程,若超出量程测发出警告提示。
(3)对测距的结果进行显示。
2.2方案设计
2.2.1测距方案
激光测距的方案在技术上可以分为连续波体制和脉冲波体制。
脉冲波体制的测距原理跟雷达测距的原理类似,激光测距器向测距目标发出激光信号,激光将被目标表面反射回来,由于已知在介质中光的传播速度,所以激光测距器测量其出发射激光信号与接受到回波信号的时间间隔,就可以计算出所要测量的距离。该方法的优点是测量速度快,测量距离远,而且对目标表面粗糙性的要求不大,适合用于大部分民用的领域。
连续波体制,激光测距仪的激光器发射出给定频率的正弦波激光信号,发射出的激光碰到被测目标反射回来后,测量出发射激光信号与接收激光信号的相位差。根据相位差进行相关计算,即可算出激光测距器与被测目标之间的距离数据。假设发射激光信号与接收激光信号的相位差 ,那么激光从发射到接收之间的时间
,那么激光从发射到接收之间的时间 为:
为:
 (2.1)
(2.1)
计算出激光测距仪与被测目标之间的距离 :
:
 (2.2)
(2.2)
脉冲波体制的主要优点是精度高,为了保证高精度测量,常需要在目标表面安装反射器,使用时较为繁琐而且成本较高。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


