基于计算机视觉的道路交通线和障碍物检测系统设计毕业论文
2020-04-12 09:05:09
摘 要
随着交通安全问题日益严重,将图象处理用于辅助驾驶系统能够有效地为行驶安全提供保证变得越来越重要,本文通过运用图象处理的多种办法并进行了改进,重点研究了道路标识线识别及障碍物距离的算法。
本文借助了opencv对道路交通标识线以及道路内障碍物进行了研究,主要分成两个方面:对道路线的识别以及对障碍物的检测。对道路线的识别是在单目视觉的基础上,先进行图像预处理然后再采用Canny边缘检测之后后再用Hough变换的方案来实现,总体来说该算法对于道路线的检测实现效果还是比较好。对障碍物的检测则是利用双目摄像头拍摄,再利用SGBM算法对障碍物进行距离检测。
本文的主要工作有:首先对双目摄像头进行标定,标定完成后先对图像基于Hough变换对道路直线成功识别,基于Hough变换进行了改进实现了弯道交通标识线的检测,对于障碍物采用双目匹配的方法进行了检测成功测出了距离。
关键词:道路线识别;障碍物检测; Hough变换;SGBM算法
Abstract
With traffic safety problem become more and more serious, the image processing is used for auxiliary driving system can effectively to ensure driving safety is becoming more and more important, in this paper, by using image processing ways and was improved, road marking line recognition and the algorithm of obstacle distance are mainly studied.
In this paper, opencv is used to study road traffic identification lines and obstacles in the road, which are mainly divided into two aspects: road route identification and obstacle detection. The recognition of the route is based on monocular vision, to image preprocessing and then uses the Canny edge detection after the reoccupy after Hough transform scheme, overall the algorithm for the route of detection effect is well. The detection of obstacles uses the binocular cameras to take photos and use SGBM algorithm to conduct distance detection .
In this paper, the main work includes: The first calibrate camera calibration, after the calibration image based on Hough transform in road line successfully.based on Hough transform is improved to achieve the corner detection of traffic signs line, adopt the method of binocular matching for obstacles were tested to measure the distance from success.
Key Words:Road line recognition;Obstacle detection; Hough Transform ;SGBM algorith
目录
摘 要 I
Abstract II
第1章 绪论 1
1.1 研究目的及意义 1
1.2 国内外研究现状 1
1.2.1道路线研究现状 1
1.2.2障碍物研究现状 3
1.3本文的主要内容及章节小结 3
第2章 图像预处理及总体思路 4
2.1引言 4
2.2灰度化 4
2.3滤波 4
2.3.1中值滤波 4
2.3.2高斯滤波 5
2.4边缘增强 6
2.4.1 Robert算子 6
2.4.2 Sobel算子 6
2.4.3 Laplace算子 7
2.4.4 Canny算子 7
2.5本文总体思路 9
2.6本章小结 10
第3章 道路线识别算法 11
3.1道路线识别算法概述 11
3.2方案及实验结果 11
3.2.1结构化道路 11
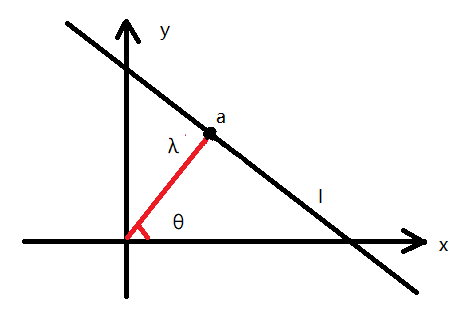
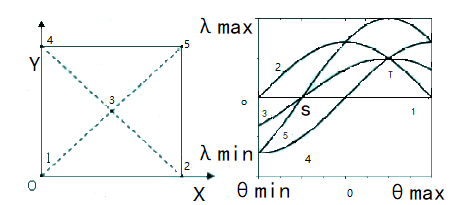
3.2.2 Hough变换原理 12
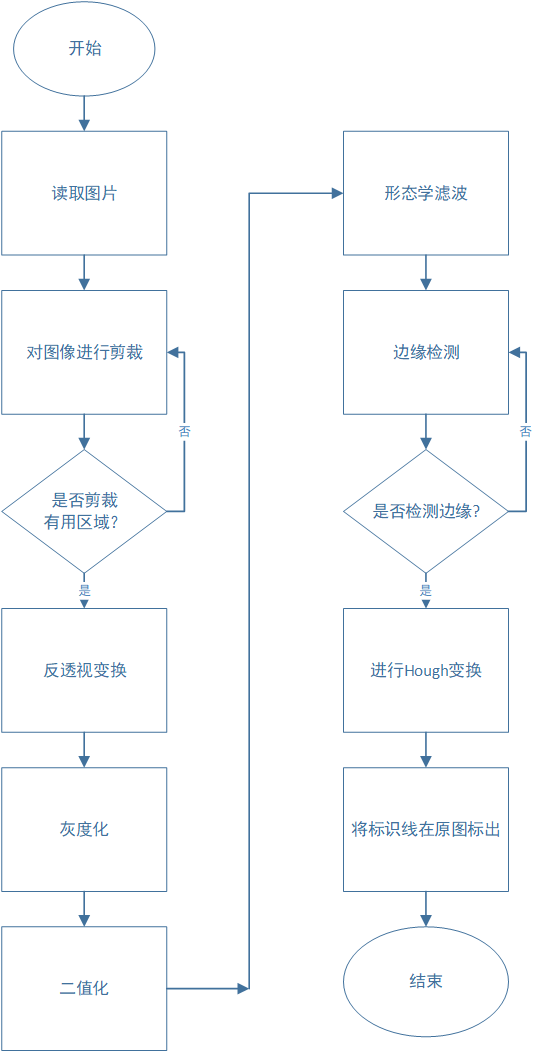
3.2.3道路线识别 13
3.3本章小结 20
第4章 障碍物识别算法 21
4.1障碍物检测原理 21
4.2立体匹配算法 22
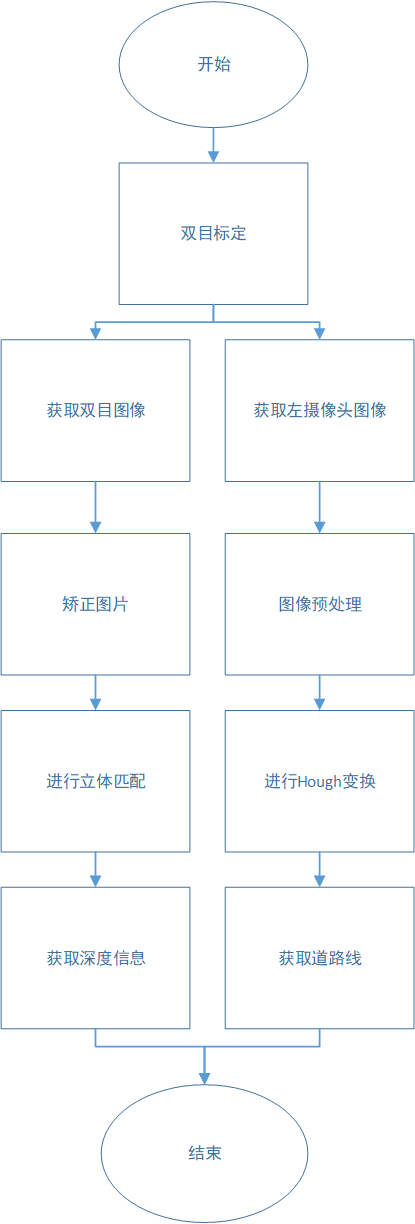
4.3障碍物检测的流程 22
4.3.1双目相机标定 24
4.3.2矫正图片 27
4.3.3立体匹配 28
4.4本章小结 31
第5章 总结与想法 32
参考文献 33
附录A 34
致 谢 35
第1章 绪论
1.1 研究目的及意义
随着我国的人均拥有汽车数量的快速增长,交通安全严峻。然而我国的交通想匹配的基础设施建设并非完善,人们对于安全驾驶的意识不强以及法律法规的不健全,因此交通事故已成为社会的一个大顽疾。其中09、10、11年全国因为交通事故而死亡的人分别为:67759、65225、62387人。并且已经多年处于世界第一。行驶安全威胁着我们的生命财产安全,这已经是相关部门最为关注的一个问题。
根据国内外所发布的调查结果分析表明,绝大部分的交通事故驾驶员有不可逃避的责任。其中直接关系达到70%,而间接则达到了90%。事实上,绝大多数交通事故并非由低驾驶技术引起,而是由于疲劳驾驶,注意力不集中等原因造成地。因此,研开一种能够通过提醒及时纠正驾驶员的操作失误汽车驾驶的辅助系统可以大大减少交通事故发生的概率。而计算机辅助驾驶的基础便是道路识别,本文所探讨的便是基于计算机视觉的交通标识线以及障碍物的识别。
1.2 国内外研究现状
车辆辅助驾驶的研究是目前非常热门的学科,研究的成果也是百花齐放。总的来说,基于计算机视觉的道路标志线的辨认的方式可归结为两类:基于特征的方法和基于模型的方法。
1.2.1道路线研究现状
基于特征的方法:
基于特征的识别方法通过与车道线边缘的特征(颜色、灰度、梯度等)来识别出道路交通标识线[1]。首先,对图像进行处理以提取便于识别车道线的特征,然后根据识别出来的特点来表示交通标识线。车道线的特点提取可从区域和边缘两个方面来考虑。
(1)基于区域特征的方法
这种方法通过车道和非车道像素点之间特点(色彩、纹理、亮度等)的差异来区分。一般来说,这种算法对于非结构化道路的实现效果比较好。
在道路线或者道路与背景不易辨认的环境中,因为光线在整个图像中分布不平均或者其他影响因子例如阴影等,待测图像中的交通标志线的颜色有所差异,加上周围环境的颜色更加多样化。把道路区域与非道路区域进行多个以类别进行分割来提升分段的可靠性及准确性。在一些国内外文献中,以形态学为基础从而实现目标图像内比较类似区域的部分聚合,之后再进行各个区域的结合,来获得一个完整的道路区域。实际处理时,车道的条纹也能作为一个非常明显的特征,相对于周围环境来说,道路面的纹理简单明了,但是,背景环境非常复杂,所以可以通过这一显著特征来划分道路区域。在一些特殊的环境中利用这个特征可以实现非常好的效果(室内机器人的道路的识别)。美国斯坦福大学研究团队所研发的智能汽车经过将物体进行分类的方法来自动探索道路。其方法式通过获取在车顶装配摄像头所拍摄的图像来进行对于道路及非道路区域像素的分辨训练,所分辨的道路区域就是通过图像的像素所得到的。
(2)基于边缘的特征的方法
这种方法通过道路与非道路的特征变化从而找出道路的边界,并通过所找到的边缘来判断道路所在的区间。这种方法非常适合结构化道路的识别,由于其边缘结构的鲜明特点。
青岛大学的董瑞先基于Digabel以及Lantuejoul所提出的分水岭算法提出了改进。所谓分水岭算法首先进行道路的初始化定义,然后分水岭变换图像[2]。该方案的优点是简单,噪声影响因素小,鲁棒性好。但是再前方存在建筑物时,算法计算效果便不大理想。吉林大学研究团队的研究的JULUIV-4智能汽车通过车内的摄像头进行图像的获取,对图像的预处理后, Hough变换用于在获得梯度后识别交通标志线。这种方法能够有效地减少处理图像地时间,而且还能提升道路标志线地可靠性。对于结构化道路来说道路地分界线也是一个非常明显的特点清华大学便利用这一特征来实现道路线的识别
基于模型的方法:
基于模型的方法用于适应道路的拟合,针对情况不同的道路,可分别使用Hough变换、模板匹配技术、神经网络技术等来识别交通标志线[3]。目前有直线与曲线两种模型。
(1)直线模型
直线模型是最简单的一类模型。假设道路边缘与有限长度内地两条直线平行,我们可以用霍夫变换来查找图像中的道路标识线。M Bertozzi反向透视变换摄像机采集的图像,将前视图转换为俯视图,然后从图像中提取平行线。这种方法更适用于具有明显道路特征的结构化道路。徐友春、王荣本等人提出了一种基于直线道路边界模型的道路识别方案[4]。这种方法是基于直线模型的方法。但是当道路为弯道时,基于直线模型的方法便不再适用,这时候就需要以曲线为模型来实现道路线的识别。
(2)曲线模型
当道路前方为弯道时,直线不能够准确地描述道路,曲线可用于拟合道路。卷积模型、抛物线模型、多项式模型、样条曲线和双曲线模型是常见的曲线模型。
VAMP系统和Damiler-kleister系统都使用回旋曲线作为道路模型;密西根大学的MOSFET系统用数学的抛物线作为交通标识线的模型;俄亥俄州立大学的研究人员使用低阶多项式曲线模型来描述交通标识线[5];南洋理工大学的Yue Wang等采用B-样条和Catmull-Rom样条来拟合道路曲线[6]。
1.2.2障碍物研究现状
目前对于障碍物的检测主要分为:基于光流法、重投影和立体匹配。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:



课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


