基于ARM的码垛机械手控制系统设计毕业论文
2020-04-12 14:11:11
摘 要
就目前的社会,人口基数快速增长,对各类的需求也在加大,仅仅依靠双手来生产已经不可能满足眼下的需求,传统的劳动被当代机器人取代。机器人有着高效率、高精度及广泛的适应能力等系列的优点,其带来的巨大效益不容忽视,机器人的成功研制,对相关领域的推进和发展有着至关重要的作用。码垛机器人在各生产线上最为常见,它能够搬运和组装目标物体,伴随着自动化和智能化的飞速发展,智能化码垛机器人的研究成为热潮。
本次设计是研究码垛机器手的控制系统。机器手工作的效率、精度及安全性,与机器手的控制系统息息相关,尤其是路径的规划。控制轨迹的计算极其复杂,位置的正反解和速度、加速度的正反解都需要进行坐标的优化计算,涉及到物体的运动学和动力学的分析计算。在设计控制系统时,首先,要选定编程调试软件平台及单片机的选择,所选用的单片机性能要满足控制需求;其次,选择步进电机的驱动模块,设计外部电路的连接;接着,对码垛机器人进行运动学分析,选择合适的求解机器末端的方法;然后,根据设计机器人抓取的步骤,编写控制程序,可控制单个电机来验证部分程序的完整性,比如控制电机转动的角度; 最后,对机器手进行调试方案的确定。
关键词:码垛机器手、路径规划、运动学、步进电机、动力学
Asbtract
The traditional labor force can no longer meet the needs of modern production lines and is gradually being replaced by contemporary robots. Robots have the advantages of high efficiency, high precision, and a wide range of adaptability. Their huge benefits cannot be ignored. The successful development of robots plays a crucial role in the advancement and development of related fields. Palletizing robots are the most common on various production lines. They can handle and assemble target objects. With the rapid development of automation and intelligence, research on intelligent palletizing robots has become an upsurge.
This design is to study the control design of the palletizing robot. The efficiency, accuracy, and safety of the robot's work are closely related to the robot's control system, especially the path planning. The calculation of control trajectories is extremely complex. The forward and inverse solutions of the position and the forward and inverse solutions of velocity and acceleration all require the optimization of the coordinates, which involves the analysis and calculation of the kinematics and dynamics of the object. In the ARM-based control system, the teaching method is used to predetermine the robot trajectory, and then put the object on its trajectory. To achieve the pre-determined trajectory, it is necessary to record the angle at which the stepper motor rotates each time the palletizing robot reaches a point; the data of this angle includes the data of the robot's hand, the left, the right, and the front and the back movement motors. According to the obtained data, the optimal point is selected and the path that the robotic hand passes through during work is determined. After the path is planned, put the object to be transported and let the robot grip the object for transportation.
Keywords: palletizing robot, path planning, kinematics, stepper motors, dynamics
目录
摘要 I
Asbtract II
第一章 绪论 1
1.1研究的目的及意义 1
1.2国外研究现状 1
1.3国内研究现状 2
1.4课题研究的基本内容和目标 3
1.5技术方案及措施 3
1.5.1码垛机器人的机器构造 3
1.5.2码垛机器人的运动轨迹的分析 3
1.5.3码垛机器手的控制系统 4
1.6本章小结 5
第二章 硬件选型 6
2.1单片机的选型 6
2.2步进电机驱动器的选型 6
2.3电源模块的选型 7
2.4手部抓取部分的选型 8
2.5本章总结 9
第三章 硬件电路的设计 10
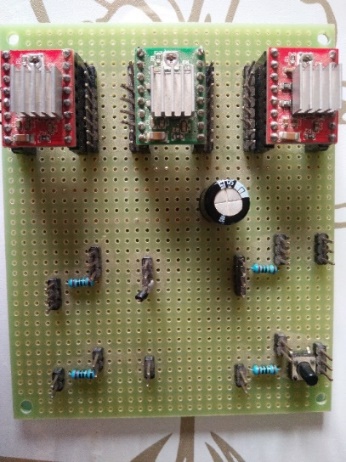
3.1驱动模块的焊接 10
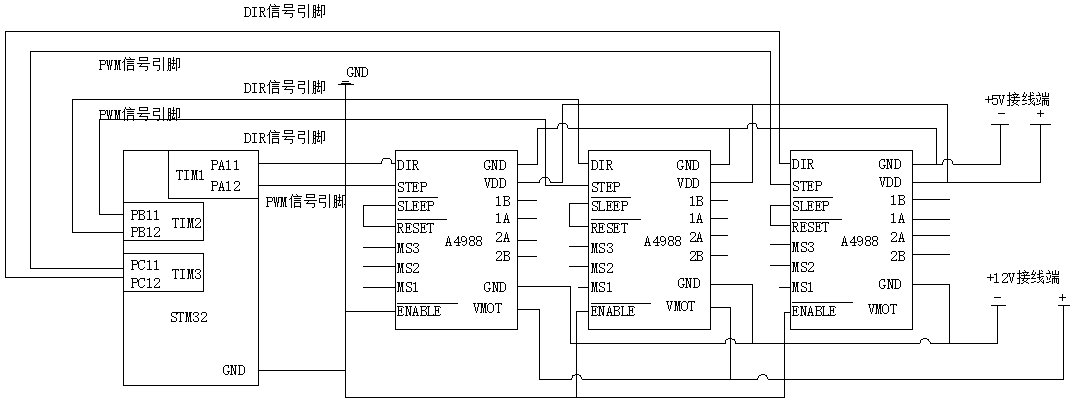
3.2单个电机驱动电路 11
3.2本章总结 12
第四章 控制系统的设计 13
4.1软件平台的搭建 13
4.2I/O引脚和资源的分配 13
4.3机器人运动学 15
4.4机器人运动学正解 16
4.5机器人运动学逆解 18
4.6轨迹的规划 21
4.7程序的组成及流程 22
4.8程序的设计 23
4.9本章小结 24
第五章 测试方案 25
5.1测试步骤 25
5.2本章小结 25
第六章 总结与展望 26
参考文献 27
附录 29
致谢 35
第一章 绪论
1.1研究的目的及意义
码垛,简单的理解,就是把物体按照一定的摆放顺序及形式,整齐的堆放好,可以实现对货物的运输、搬运;也能做精细的工作,比如开发板的焊接、精密仪器的组装。在智能化机器人投入到实际的生产线上之前,生产线上的工作基本上是由人和简单的机械共同完成的,以智能化、精确度比较低的机械作为辅助,工作内容受到限制且工作量大,导致实际效率低,生产力低,浪费了大量的资源。为了提高生产力和生产效率,人们开始研究用于代替人工作的机器人,由此提出了码垛相关的规划技术[1]。在不断的研究,借鉴国外的技术,结合国内的资源,符合解决当下实际生产力问题的码垛机器人,被成功研制并投入运用,这使得生产力得到了巨大的改变。在人和简单机械不能完成的精密任务、大规模的准确搬运任务都得到解决,节约了大量的人力物力资源。
码垛机器人的研制成功后,其在调试过程当中,容易出现速度、加速度的超限问题,且在很多情况下,驱动机构的驱动性能并没有能够得到充分发挥[2]。对机器人运动学的分析尤为重要,特别是最机器人 末端的位姿的描述,选择恰当的运动学求解方法,比较容易的得出轨迹的最优规划[3]。
至今为止,对新的搬运技术依然在不断的探究。原先的码垛机、堆垛机都拥有各自的不足之处,如占地面积大、灵活度差等问题。近几年以来,码垛机器人因在机械结构的灵活、适用范围广、占地面积小等诸多方面的优势,在现代物流中发挥着举足轻重的作用。码垛机器人能在无人参与的情况下,按照事先预定好的运动轨迹,自动的进行物体的搬运和码垛。
1.2国外研究现状
世界上第一台六轴控制码垛机器人,是由德国的KUKA公司成功研制,随着技术的不断提高,机器人的承载能力、适应能力和机械性能得到提高[4]。日本率先在码垛工作中引入了机器人,该机器人专门用于工业生产。对码垛机器人来说,美国、德国、瑞典和日本在技术上具有领先的地位,技术相对其他国家而言较为成熟,所以,码垛机器人被分为两大派系欧日两大派系,在日本,比较被人们认可的机器人有:安川、OTC、FANUC、OKURA,欧系:KUKA、ABB[5]。
在国外,码垛机器人大部分是多关节、多连杆的机器人,为了提高工作的精度和增大工作的范围,复合材料的运用也结合到了机器人的设计中,机器人的材质也会影响到自身的特性 [6]。在机器人的设计构思上,借助仿真软件,进行仿真分析各个机器人的关节和部件,不断进行优化,提高机器人的总体性能,比如增加机械硬度和机械能力、减少在工作时器件损耗。机器人关节采用电机,一般是交流伺服电机,对于关节电机的驱动模块,还能够数字化显示。针对于某项领域的机器人也不断被研制成功,比如KUKA公司研制出了一款新的码垛机器人KR300-2PA,专门完成高速高负荷的作业[7]。它的机身摆脱传统的金属材质,使用了聚合材料,聚碳纤维材料轻盈、硬度高;在工作时,能做到轻巧、快捷、强劲有力。当新型的机器人研制成功时,能否大规模使用成为一个问题,维护机器人耗费的资源、机器人工作时对比其他的机器人是否节能成为了不可忽略的考虑因素,KUKA公司的研制人员为了解决这个问题,设计四轴时采用了倾斜式的方法,使得新型机器人符合了当下的设计理念。库卡码垛机器人的最大技术优势是采用了在微软 Windows界面下可操作的PCBASED 控制系统[8-9]。
码垛机器人的运行,离不开控制系统,控制系统的优劣能够很大程度上决定机器人的实用性。要让机器人能按照预定的程序运行,要知道机器人的基本原理,机器人有两种运动,一是对自身的正确运动;二是自身各部分之间的协调运动。计算机技术未成熟之前,采用的是封闭的控制系统,对开放式控制系统的研究相对要少,计算机技术取得一定的成就之后,开放式的控制系统逐渐被开发并,结合新型机器人,性能得到可靠的保证,使得后来机器人被广泛的应用于众多领域。
1.3国内研究现状
在国内,对于工业机器人的研究要比国外稍微晚些,但是所产生的研究院所和机器人厂家,它们的联合为国内的机器人的发展提高了步伐。哈尔滨博实自动化公司的RB系列机器人,凭借其简单的机械结构、安全的可靠性及工作时的高效性,成为该公司的代言机器人。沈阳自动化研究所是中国机器人事业的重要发展地,其带来的技术突破为国家机器人事业做出了巨大的贡献。总体来说,和国外机器人技术还是有差距,对机器人的应用范围、承载能力、工作精度及高度智能化的研究,还有漫长的过程。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:



课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


