水面多船舶检测及跟踪系统设计毕业论文
2020-04-12 14:23:57
摘 要
随着我国现代化运输体系的迅速发展,水路运输逐渐成为我国运输体系中一个重要的手段。航运监管对维持航道畅通、航运稳定等发挥着不可忽视的作用。而传统的监管方式如通过摄像头进行人工监控或定时人工巡航等方式,已经不能满足当前的航道管理需求。
本文提出了一种基于静止摄像头的船舶自动检测跟踪系统,实现了高效快速的航道智能监管。船舶检测跟踪的技术核心是能够在复杂水面环境中完整地分割船舶,快速地提取船舶的特征,并且准确地进行跟踪,在这个过程中要考虑算法的实时性和鲁棒性。然而,在如此复杂的水面环境下同时对多船舶目标进行跟踪往往比较困难,这就需要在考虑船舶之间遮挡问题的基础上,设计一种在各种复杂航道水面环境中,稳定检测、跟踪多个船舶的算法。
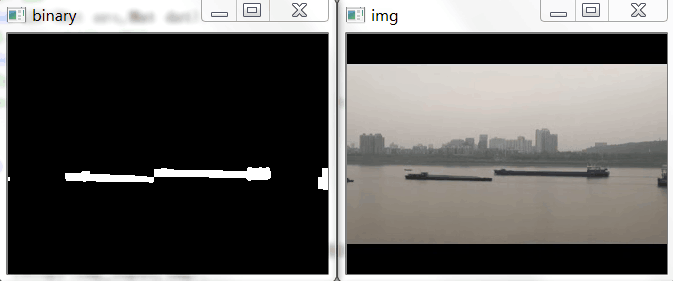
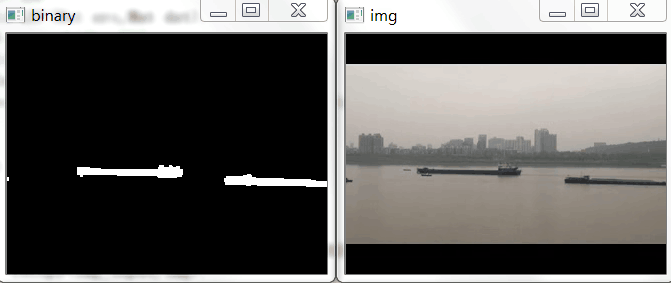
基于上述分析,本文构建了一个基于像素自适应分割的运动目标检测算法和FAST角点检测跟踪算法。首先建立水面背景模型,通过当前帧与背景模型的相识度来分割、检测水面运动船舶;然后采用FAST算法检测船舶的丰富角点,并基于这些角点来跟踪运动船舶。本文的方法不仅能够准确的检测到目标船舶,还能稳定的跟踪船舶的运动,在结合了卡尔曼滤波之后,即使目标船舶被其它船舶等遮挡,还是能够继续保持稳定的跟踪。
实验结果验证了该算法能在有遮挡的情况下,完成水面多船舶的跟踪,且鲁棒性较高。
关键词: 船舶检测;船舶跟踪;FAST;遮挡持续跟踪
Abstrac
With the rapid development of China's modern transportation system, waterway transportation has gradually become an important means in China's transportation system. Shipping supervision plays an important role in maintaining smooth navigation and shipping stability. The traditional way of supervision, such as manually monitoring by camera or timing artificial cruise, can no longer meet the current needs of channel management.
In this paper, a ship automatic detection and tracking system based on stationary cameras is proposed, which realizes efficient and fast intelligent supervision of waterways. The core of ship detection and tracking technology is that it can divide the ship completely in the complex water surface environment, quickly extract the features of the ship and track it accurately. In this process, the real-time and robustness of the algorithm should be considered. However, it is often difficult to track multiple ships at the same time in such a complex surface environment, which requires the design of an algorithm to detect and track multiple ships in the water surface environment of a variety of complex waterways.
Based on the above analysis, a moving object detection algorithm based on pixel adaptive segmentation and FAST corner detection and tracking algorithm are constructed in this paper. First, the water surface background model is set up, and the water surface moving ship is detected by the recognition degree of the current frame and the background model. Then the FAST algorithm is used to detect the rich angle of the ship, and the moving ships are tracked based on these angles. The method not only can detect the target ship accurately, but also can keep track of the ship's motion. After combining the Calman filter, even the target ship is blocked by other ships, it can continue to keep stable tracking.
Experimental results show that the algorithm can track multiple ships under occlusion and has high robustness.
Key Words:ship detection;ship tracking;FAST;continuous tracking under occlusion
目 录
第1章 绪论 1
1.1 课题背景 1
1.2 研究目的及意义 1
1.3 国内外研究现状 2
1.4 论文章节安排 3
第2章 图像预处理 4
2.1 双边滤波 4
2.2 中值滤波 4
2.3 均值滤波 5
2.4 高斯滤波 6
2.5 本章小结 6
第3章 水面船舶检测 7
3.1 常用目标检测算法 7
3.1.1 帧间差分法 7
3.1.2 光流法 8
3.1.3 背景差分法 9
3.2 基于像素自适应分割的运动目标检测算法 10
3.2.1 建立背景模型 11
3.2.2 背景模型的更新 11
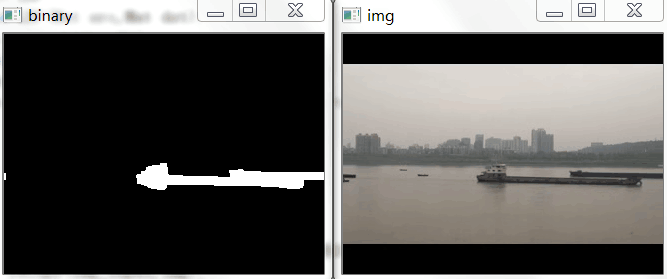
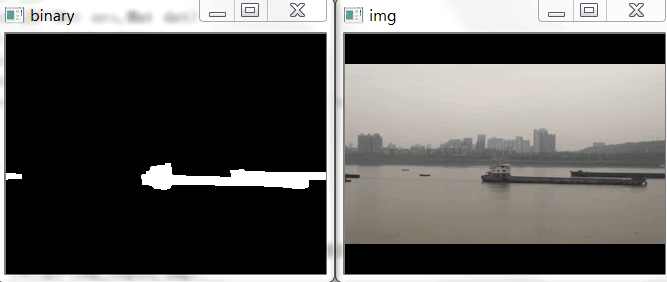
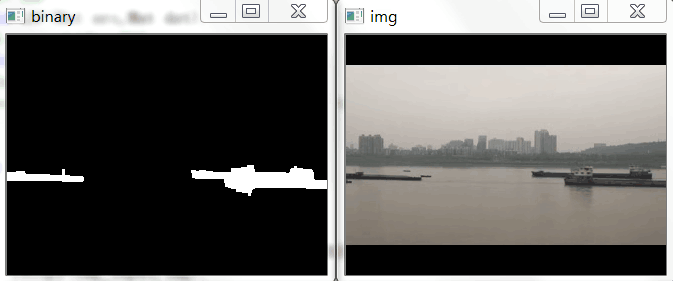
3.3 实验及结果分析 12
3.4 本章小结 14
第4章 水面船舶跟踪 15
4.1卡尔曼滤波器原理 15
4.2目标特征点跟踪算法 15
4.2.1常用特征点检测算法 15
4.2.2 FAST角点检测算法 16
4.3 结合特征点与卡尔曼滤波器的跟踪算法 18
4.4 实验及结果分析 20
4.5 本章小结 25
第5章 总结与展望 26
5.1 总结 26
5.2 展望 26
参考文献 27
致谢 28
第1章 绪论
1.1 课题背景
得益于计算机的发展,人工智能也获得了很大发展。而人工智能中又以计算机视觉发展最为迅速,因应用潜力极大,科研人员对其非常重视。过去的几年在计算机视觉的历史上是非常令人兴奋的[1],计算机视觉主要是研究利用图像采集设备如监控摄像头和计算机程序处理来模拟人类的视觉,来对运动目标进行检测识别、跟踪分析等,用于目标监测跟踪系统应能够迅速分析处理视频。目标检测跟踪技术就相当于以智能监控设备和计算机处理软件去代替人类来更加快速高效的检测识别并跟踪运动目标。所以目标检测与跟踪系统的设计是一个十分有实际应用意义的课题。
1.2 研究目的及意义
水路运输作为我国现代化运输体系中历史最为悠久的一种运输方式,早在两千多年前就有所应用,京杭大运河经过隋朝元朝等朝代的扩建,如今已成为我国内河航运的重要资源。水路运输不仅成本低、载重量大,还具有较少的污染排放与节约能源等优势,是一种高性价比且环保的运输方式。特别是能够运载如军工设备等一些大型器件,这是其它运输方式所不可比拟的。由于水路运输比较特殊,使得航运监管变得十分困难。另一方面,由于经济的快速发展,陆路运输的交通压力越来越重,公路资源越来越紧张,水路运输逐渐在运输体系中占据了重要地位,航运业发展的越来越快,来往的运输船舶数也急剧增长,水面上船舶的密度越来越大,水路运输的通行能力也大幅降低,同时经常会出现多船舶互相遮挡的情况。大量的船舶为水上交通运输带来便利的同时,也会增加发生船舶航运事故的风险,这阻碍了船舶运输行业的发展并威胁着航运从业人员的安全。航运事故主要是船舶之间的碰撞以及船舶与桥梁、闸口等的碰撞。传统水路交通管理主要采用摄像头监控和人工巡航两种模式。摄像头监控主要是海事监管单位针对辖区内重要航段、以及事故多发的航段进行摄像头布控,然后指挥中心的工作人员通过屏幕监视这些航段的航行情况。这就要求工作人员长时间保持高度注意力观察几十个电子显示器,而且对于危险的预判也要依靠工作人员的个人能力以及工作经验。人工巡航管理则是出动人力在一天内去航道巡视数次,更是一种低效率的工作方式,无法满足实际要求。上述低效的航运监管手段使得航道压力越来越大,严重制约了我国社会经济发展。采用智能监控来跟踪分析船舶的动向等不仅能够提高航道的通行能力、减少航运事故的发生,还能够提高信息化管理水平,从而就能节约人力资源、减少物力成本,从而降低污染。所以为我国的航运监管开发一套高效的智能监控跟踪系统已经迫在眉睫。
因此本文拟通过实时采集航运航道的视频,并通过基于opencv的目标检测和跟踪等技术,分析船舶的航行情况,来指挥控制船舶的航行,以避免发生船舶间的相互碰撞以及船舶与桥梁、闸口等的碰撞,能够适应各种航行环境,降低人工成本[2]。
1.3 国内外研究现状
随着计算机视觉的迅速发展,目前,目标的检测与跟踪的研究主要集中在目标跟踪。1940年前后,运动目标检测与跟踪理论才刚刚起步,但受制于当时的硬件处理能力的不足,设备也非常昂贵等,运动目标检测与跟踪发展的非常缓慢。直到1980年之后,集成电路终于有了大的发展,计算机的处理能力大幅提高,目标检测与跟踪领域才开始重新提上日程。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


