无人驾驶推土机转向执行机构设计毕业论文
2020-04-12 15:57:05
摘 要
转向机构是履带车辆里最重要的机构之一,转向机构的灵敏度、简单性、高效率一直是人们所最求的目标,然而人工操作会出现效率低和灵敏度不高。利用驾驶机器人的原理去设计一个机械机构代替人工操作是解决这一方案的最优选择,对推土机转向操作的研究,设计了一个机械结构去模仿人工转向操作。本文通过将手柄的运动轨迹简化为了简单的横向与纵向的平面直线运动,利用数学几何思想计算出了运动轨迹。本文设计了丝杆传动的直线执行机构和齿轮齿条的直线执行机构去完成横向与纵向的直线运动,并对齿轮齿条与丝杆进行了设计与校核,三维建模软件作为现今机械行业使用率最高的软件,应用三模仿真软件对设计的转向执行机构进行了执行机构零件设计与装配。随着机电一体化的发展,单片机控制系统越来越发达,利用单片机去完成控制步进电机是目前最常见的方法,本文从步进电机的驱动原理出发,通过单片机的脉冲宽度调制去完成步进电机控制所需要的控制脉冲信号,完成了对步进电机正转、反转和停机的控制。
关键词:推土机转向;丝杆传动;齿轮齿条传动;步进电机控制;
Abstract
The steering mechanism is one of the most important organizations in the tracked vehicle. The sensitivity, simplicity and efficiency of the steering mechanism have always been the most sought after. However, the efficiency and sensitivity of the manual operation will be low. Using the principle of driving robot to design a mechanical mechanism instead of manual operation is the best choice to solve this scheme. A mechanical structure is designed to imitate the artificial steering operation on the study of the steering operation of the bulldozer. In this paper, the trajectory of the handle is simplified for simple horizontal and vertical linear motion, and the trajectory is calculated by mathematical geometry. This paper designed a screw drive linear actuator and gear rack linear actuator to complete horizontal and vertical linear motion, and the gear rack and the screw rod is designed and checked, the 3D modeling software as the machinery industry the highest utilization rate of the software application, the third mock exam simulation software for steering design The mechanism has carried out the design and assembly of the actuator parts. With the development of mechatronics, single chip microcomputer control system is more and more developed. It is the most common method to complete control step motor using single chip microcomputer. This paper, starting from the driving principle of step motor, completes the control pulse signal needed by the stepper motor control through the pulse width modulation of the single chip microcomputer. The control of the forward, reverse and shutdown of the stepping motor.
Keywords: Bulldozer steering; screw drive; rack and pinion transmission; stepper motor control;
目录
第1章 绪论 1
1.1 选题的背景及意义 1
1.1.1 研究背景和意义 1
1.2 无人驾驶机器人国内外研究现状 1
1.3 本文主要工作 2
2.1 推土机转向系统概述 3
2.1.1 推土机转向机构类型 3
2.1.2 转向操纵过程分析 3
2.2 推土机单手柄操纵手柄原理 4
2.2.1 概况 4
2.2.2 单手柄操纵系统 5
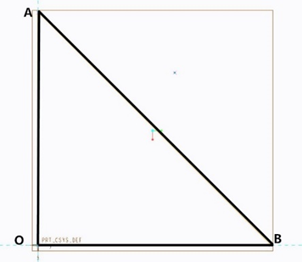
2.2.3 手柄操纵简化模型 5
2.3 本章小结 6
3.1执行机构的设计分析 7
3.1.1机械机构分析 7
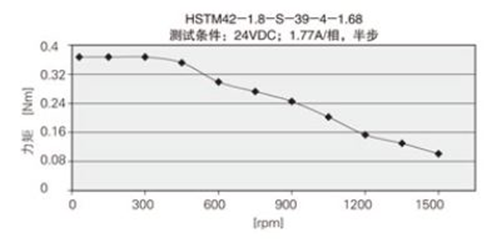
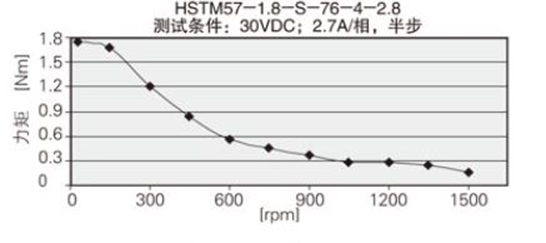
3.1.2控制用电机分析 7
3.2 执行机构的机构构成 8
3.2.1执行机构设计原则 8
3.3 执行机构总体设计方案 8
3.3.1 滚珠丝杆设计 9
3.3.2 齿轮齿条传动设计 13
3.4本章小结 18
4.1三维建模软件简介 19
4.2 执行机构建模 19
4.2.1 夹具建模 19
4.2.2 直线机构建模 20
4.2.3 执行机构装配 22
4.3运动仿真 22
4.3.1 纵向执行机构运动仿真 22
4.3.2 横向执行机构运动仿真 25
4.4本章小结 26
第5章 电机控制 27
5.1 步进电机与单片机简介 27
5.1.1步进电机工作原理 27
5.1.2步进电机驱动器 27
5.1.3单片机对步进电机控制原理 27
5.2步进电机调速与位置控制 28
5.3软件设计 28
5.3.1程序代码设计 29
5.4本章小结 30
第6章 总结与展望 31
6.1 工作结论 31
6.2展望 31
参考文献 32
致谢 33
第1章 绪论
1.1 选题的背景及意义
1.1.1 研究背景和意义
推土机是一种基本工程机械,且在一般情况下没有作业质量的要求,广泛应用于建筑、农林业、国防建设等领域。其作业工况十分复杂、负荷变化频繁且范围较宽。推土机是基础建设中主要应用的工机械之一,在我们国民经济发展中占有重要地位,但是国产推土机存在非常多的问题,如耗油大,可靠性差,自动性差等[1],但最主要问题是司机所要操作的机构较多,长时间工作往往会出现操作失误并且大部分工作环境恶劣,因此急需对推土机的自动化,智能化的研究,去帮助驾驶员完成部分操作。然而如今智能驾驶发展不够成熟,工程机械上不能够完全使用智能驾驶技术去完成作业。针对现如今的发展现状,驾驶机器人成为了自动驾驶的另一途径,本文主要设计推土机的转向机构去完成推土机的前进、后退、转向,代替司机的体力劳动并且能够解决部分推土机无法直接控制的问题。
1.2 无人驾驶机器人国内外研究现状
自1980年以来,国外自动驾驶机器人技术得到了突飞猛进的进展,研究单位主要是发达国家的一些较的仪器测试公式和零部件供应商,如日本的Horiba 公司,英国的Froude Consine,Anthony Best Dynamics(ABD)公司,德国的STAHLE、WITT公司 ,美国的LBECO公司等。英国ABD公司研究出来的SR系列转向机器人,通过该转向机器人可以测试出车辆转向性能,也可以按照规定的路径进行行驶,有着高的精确度和高的重复性的特点。作为世界上最大的零部件与整车试验用自动驾驶机器人的供应商德国STAHLE公司,其开发的驾驶机器人可应用于变速箱试验、环境试验、噪声试验、公路里程累计试验、耐久试验等[2]。 一些汽车制造商也对自动驾驶机器人进行了一些研究和开发。例如,德国大众开发了一款户外道路测试驾驶机器人,福特所开发的驾驶机器人能测试汽车的加速度,制动和转向。
20世纪90年代中期国内开始自动驾驶机器人的技术研究,主要是在汽车公司、高校、和科研机构中进行。东南大学和南京汽车研究所共同研制的,并于2014年12月申请专利,它是一种气电混合式驾驶技巧人装置,能够在不对车辆改造的条件下,安装在试验车的驾驶室内,适用于不同类型、不同挡位分布、不同踏板行程的车辆,并能根据行驶循环工况协调控制油门机械腿,制动机械腿,离合器机械腿和换挡机械手、实现汽车的运行。目前拥有自主知识产权用于汽车性能试验的DNC-1型气动驾驶机器人和用于汽车排放耐久性试验的DNC-2型气电混合驾驶机器人是由东南大学和南京汽车研究所联合研制的。东南大学张维公设计了一台气动机器人和“伺服电机 滚珠丝杠”驱动机械手[3];清华大学研究组设计的“电动缸 滑轨”自动驾驶机器人[4]。
1.3 本文主要工作
本文在阐述履带车辆行驶原理的基础上,设计了一套针对推土机转向的执行机构,本文主要内容如下:
(1)通过学习履带车辆的行驶原理,分析了推土机的转向机构类型并以差速转向机构为研究对象,以履带推土机的转向原理和操纵原理为基础进行直线机构设计。
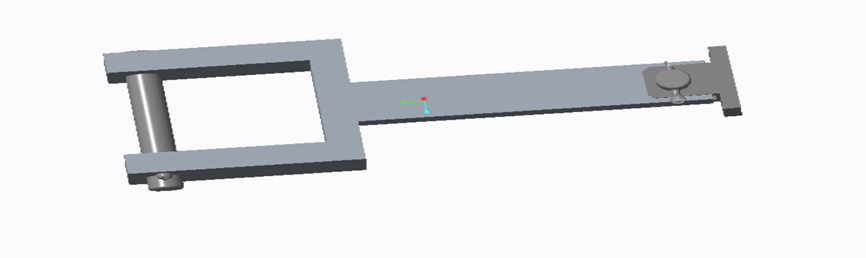
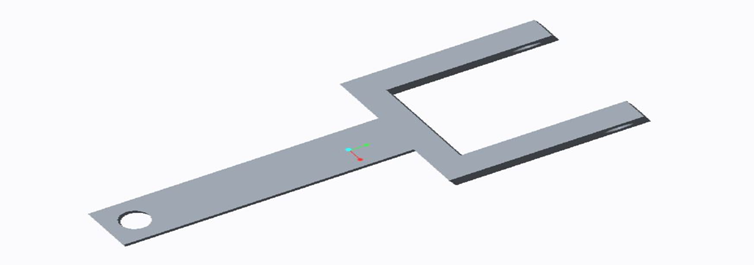
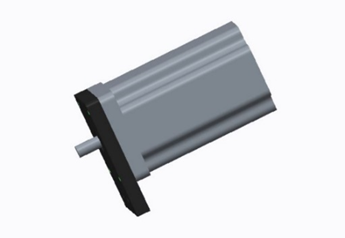
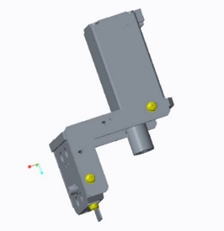
(2)利用CREO三维建模软件,对直线执行机构进行设计,并完成装配,控制操纵杆Y方向的执行机构为丝杆滑台传动机构,控制操纵杆X方向的执行机构为齿轮齿条执行机构,以机械设计为基础对这两个机构进行选型计算。
(3)完成直线机构方案设计,进行电机选择,了解步进电机和伺服电机原理,并分析了其在本方案中选择的优缺点。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


