基于陀螺仪传感器的自平衡小车的设计毕业论文
2020-04-12 16:05:17
摘 要
本文介绍了平衡小车的市场前景本文借助陀螺仪传感器对平衡小车实时角度进行测量,通过测出的角度值对小车进行PID控制来使小车达到平衡的状态,然后通过不同的信号控制使小车能够前后左右的运动。论文主要研究了陀螺仪对小车倾角测量的精确度和适用情形以及不足之处。研究结果表明:单一的陀螺仪传感器会使得小车在静态的角度测量不准确,因此采用陀螺仪加速度计同时使用的方法来进行测量减少误差。本文的特色:通过两种传感器同时测量获得更加精确的角度,然后设计了一种PID算法使小车很好的完成了直立行为,然后通过蓝牙控制使得小车能够完成前后左右的操作。
关键词:陀螺仪传感器;平衡小车;PID控制;
Abstract
This article describes the market prospects of the balance of the car. This article uses the gyro sensor to measure the balance car real-time angle, through the measured value of the value of the car PID control to make the car reach a balanced state, and then through a different signal control to enable the car before and after Left and right movements. The thesis mainly studies the accuracy, applicable situation and inadequacies of the gyroscope's inclination measurement. The research results show that a single gyro sensor will make the car's static angle measurement inaccurate. Therefore, the gyro accelerometer is used simultaneously to reduce the measurement error. The characteristics of this article: Through two sensors at the same time to obtain a more accurate angle measurement, and then design a PID algorithm to complete the erection behavior of the car well, and then through the Bluetooth control to enable the car to complete the forward and backward left turn right operation.
Key Words:Gyro sensor;Balance car;PID control
目录
第1章 绪论 1
1.1研究目的及意义 1
1.2国内外研究现状 2
1.2.1 国外研究成果 2
1.2.2 国内研究成果 3
1.3本文的研究内容 3
第2章 系统原理分析 4
2.1控制系统分析 4
2.2平衡控制原理分析 5
2.3 PID控制器设计 6
第3章 系统硬件总体设计 8
3.1系统方案选择 8
3.1.1主核芯片的选择 8
3.1.2传感器的选择 8
3.1.3蓝牙模块 9
3.1.4电机的选择 9
3.2最终方案的确定 10
3.3各种芯片介绍及接口电路 10
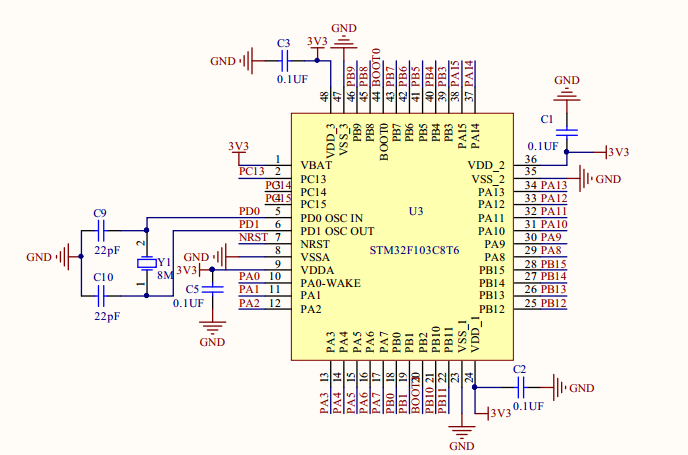
3.3.1主要控制电路 10
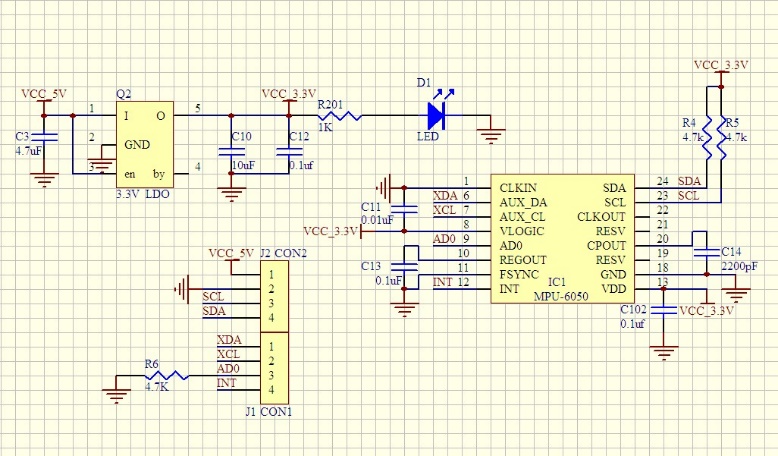
3.3.2 MPU6050设计电路 11
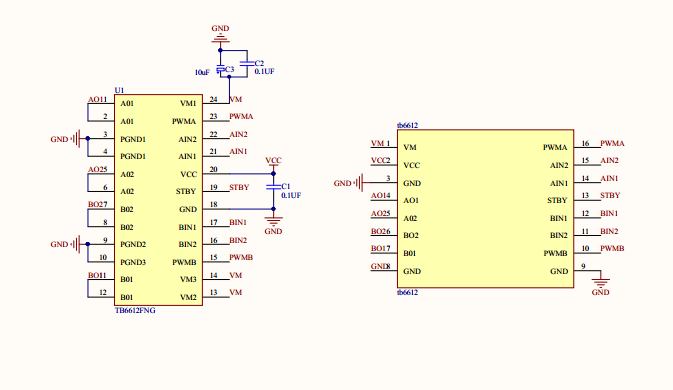
3.3.3小车驱动电路 11
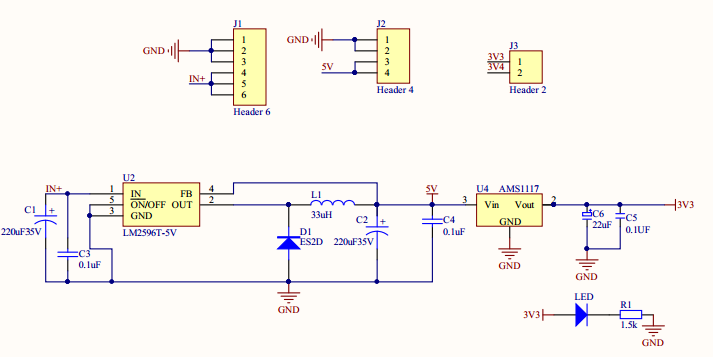
3.3.4电源供电电路 12
第4章 整体软件设计 13
4.1 软件初始化 13
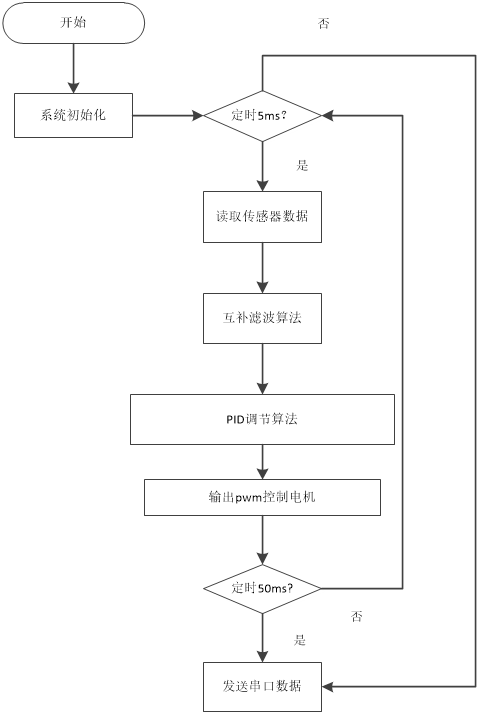
4.2小车PID程序设计 14
4.3小车滤波程序 15
4.4 小车蓝牙控制程序 16
第5章 系统制作与调试 17
5.1最小系统板的硬件调试 17
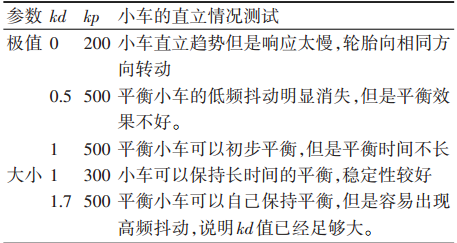
5.2小车直立PD控制调试 17
5.3小车速度控制PI调试 18
5.4 MPU6050测试 18
第6章 结论 20
参考文献 21
致 谢 23
第1章 绪论
1.1研究目的及意义
在过去的十年中,移动机器人已经走出了军事和工业环境,进入了医院,学校和普通家庭等民用和个人空间。尽管许多这些用于民用机器的机器人机械稳定,例如爱宝,索尼机器狗,或四轮吸尘器,普通的旁观者会觉得凛然的是Segway个人交通工具,这是一种机械不稳定,这种车辆已经在执法,旅游等方面得到了部署。这种车辆可以合理地称为机器人,因为没有伴随的感官能力和智能控制,每个机器人,赛格威都不能保持直立。虽然赛格威可能是一个众所周知的商业产品,但对这种机械系统的控制的研究已经多样化。两轮自平衡小车与倒立摆原理类似,它是控制教育和研究中的重要试验平台。除了赛格威的发展之外,对两轮自平衡机器人的探索已被频繁报道。例如,JOE和nBot都是具有惯性传感器,电机编码器和车载微控制器的早期版本。从那时起,对这种平台的控制设计进行了积极的研究,包括经典和线性多变量控制方法,非线性反推控制,模糊神经控制和上述的组合。值得一提的是一个相关的和有趣的工作,涉及使用经典控制来平衡四轮车在其两个侧轮上的运动。移动机器人的研究涉及计算机领域技术,软件技术,微电子技术和很多与之相关学科如C语言,电路,控制理论,现代控制技术等。因为它涉及广泛的研究困难,但技术内容是高,人才的需求,所以可以说机器人的发展可以代表一个国家的整体国民强度。噪音干扰的影响,工程,通讯,航空航天,工业自动化等领域具有广泛的应用。我们可以将双轮自平衡小车看作一种带有轮子的移动机器人,可以调整根据电机的加速度到车体的倾斜角度保证汽车的平衡。该推导出两轮车辆模型来自倒立摆,它是一个不确定性非线性系统,而且各个系统之间具有很强的耦合性。所以,两个轮子自动平衡车进行检查各种控制算法都很棒意义。在汽车和其他电机在当下盛行的车辆汽车行业带来严重环境污染,交通问题和能源问题。两轮平衡机器人获得了发展势头在过去的十年里,在一些控制和机器人技术方面世界各地的研究中心。 为什么? 两轮平衡机器人是研究人员的一个很好的平台调查各种控制器的控制效率系统。 两轮平衡机器人的研究是基于变频摆钟模型。 所以,一个两个轮式平衡机器人需要一个好的控制器来控制本身处于直立状态,无需外界的需求。如今,各类控制器得到了实施以两轮平衡机器人为例二次调节器,杆位置控制单元,模糊逻辑控制单元,PID控制单元。自平衡车辆由于重力的影响本身不稳定,为了保持姿势的平衡,电动机的控制是必要的,并且通过电动机的旋转来控制传感器,软件,微处理器和车体机构调整整个电动车的平衡。它是一个复杂的非线性系统,集环境识别,动态识别与模糊控制,动作控制以及执行于一体,难度大,控制理论难度大,控制算法复杂,为控制理论的研究带来了很大的理论价值。
1.2国内外研究现状
两轮平衡车平衡控制与倒立摆工作相同,倒立摆的研究从20世纪五十年代就已经开始了,当时麻省理工大学的教授们想要研究航天飞机和火箭的发射的状态监测和控制问题设计出了一种倒立摆系统。可以通过倒立摆来测试和验证各种PID算法的准确性。美国,日本,瑞士等国度已最先研讨自平衡车辆,并已到达优秀水平,国内一些大学和研究机构也对此实行了研究并获得了一定成绩。
1.2.1 国外研究成果
小车在两轮平衡的过程中可以被看作是一种双轮机器人,它具有不同于机器人的本质。两轮自行式机器人的最早开始的研究受到日本电子通信大学Kazu YamafUji教授的启发,该大学于1986年开始实施一种名为“这是一款平行车自平衡自行车“,这被认为是原来的电动车平衡自身的两轮车。控制电路及其驱动电路安装在车身的顶部。车轮中的小柱与地面接触以检测身体的倾向。美国乐高公司Steve Hassenplug设计了一款带有双轮Legway的自动布线机器人。该机器人采用不同的电机驱动器和远程控制操作。平衡可以保持前进,后退和角度,并且可以实现U旋转和半径脉冲.Legway是世界上首款自平衡机器人。机械结构和软件设计都是通过模块化完成的,因此装配和拆卸也变得很容易。
瑞士联邦理工学院的工业电子实验室设计并制造了一种基于反向振荡理论的双轮手推车,用于模拟人类行走。小车由DSP控制。在车架顶部,重量被固定以模拟车上的乘客。通过陀螺仪和电机编码器来稳定系统。
在1996年,日本筑波大学的Ha和Yuta设计了一种带有两个轮子的自平衡机器人,两个轮子独立地由直流电机供电,陀螺仪等惯性传感器用于测量系统的保持角度,并且使用编码器自转速度可以在二维空间自由移动,这些年来,随着对两轮自主机器人的研究越来越多,此项技术已成为研究全球机器人控制技术的热门之一。在本世纪初期,美国科学家迪恩卡门制作了一种创新的便利的两轮交通器械——Segway,此发明的出现,迅速引起全世界的关注,充分体现了两轮平衡车的巨大的市场和经济效益。驾驶员通过简单地向前后倾斜来改变重心从而操作电动车辆,从而能够执行诸如起动,加速,减速,转向和停止的正常驾驶操作,使得室外下雪的雨雪也可以在环境中使用。它可以用于旅游,娱乐,健身和观光。SegwayPT是一种成熟的产品,由四部分组成:智能传感器网络,驱动单元,机械单元,控制系统。控制计算可以达到每秒100次,电机控制在1 ms内执行一次。感知的时间差异要快得多。
1.2.2 国内研究成果
哈尔滨工业大学设计的两轮自平衡车采用Accodometry方法,通过融合数据算法和电机的码盘数据来预测位置,在双轮自动平衡车运行期间有效地解决了由于诸如障碍物,碰撞等异常现象导致的位置估计失败的问题,由此可以解决非系统测量误差。通过过程误差对机器人位置估计的测量,减少了加速阶段固有漂移的不利影响,提高了双轮自平衡车辆的定位精度。深圳大学设计的Opianbot两轮轮式车辆采用最优控制和两轮控制方法来设计控制器,并提出了一种平衡和管理两轮自力机器人的新策略。为了增强双轮平衡小车控制的效果,通过采用IPM100数字智能伺服驱动正确控制电机的左右轮,来实现对小车运动状态的实时采集,通过状态信息进行控制,提高了控制的准确性和可靠性,集成阶段控制良好。对两轮自平衡机器人的探索也在慢慢变多,但与上述发达国家之间仍存在较大差异,主要研究机构为中国科技大学,北京理工大学,华中科技技大学等。也取得了一些比较理想的成就。我们可以将双轮自平衡小车看作一种带有轮子的移动机器人,占地面积小,结构相对简单,动作灵活。它特别适合在狭窄和危险的空间工作,并且因为它具有不稳定的动态特性。这是一个典型的倒立摆运动系统模型[3]。使其成为控制理论研究人员评估不同控制算法有效性的理想物理平台。验证它们是否能够成功控制系统,对于我国控制理论的发展具有重要意义。
1.3本文的研究内容
在本文中,对两轮车的控制提出自主平衡机器人。 该系统基于在加速度传感器和陀螺仪传感器上检测机器人的倾斜度和加速度。实施PID控制系统以引导电动机以便于保持系统平衡。 机器人的控制是由操作员通过使用蓝牙遥控器进行控制。该机器人具有在移动和转弯时平衡自身的能力在平坦的地形上。
第2章 系统原理分析
2.1控制系统分析
根据系统条件,在没有外部干扰的情况下,模型必需能够使用一对平行车轮达到平衡。之后再完成前进,后退转弯等行为。通过分析可以得知提供车辆保持站立的动能来自于两个轮子移动,由两个直流电机驱动车轮。所以,从控制的角度来看,将模型看成操作对象,唯一输入变量是两个车轮的转速。整个控制系统可以分为三个分系统:(1)平衡控制系统:通过传感器得知小车的倾斜角度,根据牛顿力学,只要与角度成正比就能使小车平衡,因此控制两个发动机的正反向来保持小车平衡。(2)速度控制系统:采用M法测量出电机的速度信息,然后和设定的门阀值比较,进行反馈之后是偏差趋于零(3)方向操控系统:通过控制后轮驱动和通过调节小车的倾斜角度来调节速度来实现垂直控制和小车的方向控制。与模型不同的趋势会导致车辆加速和减速。来达到控制模型的速度的目的,三个子系统是独立控制的,因为同一控制对象(汽车发动机)的控制最终执行,所以不同子系统之间存在联系。为方便理解与分析,在对其中一个进行分析时,使用控制变量法,假定其他输入量已经达到平衡,例如,在速度控制中和在方向控制中,小车必须保持平衡直立。方向控制的时候速度固定,控制小车平衡的时候,速度和方向控制也必须稳定,必须保持三项任务。三者之间的平衡至关重要。因为模型同时受到三种控制方法的作用。从控制汽车平衡的角度来看,其他两种控制方式会影响平衡的性能。因此,为了减少对平衡控制的影响,小车在速度和方向上必须保持平稳的状态,例如,为了调整速度,小汽车的倾斜角度的设定值必须由平衡改变。通过不断的改变模型的实际角度来调试速度控制系数来完成速度控制。为了防止小车模型的平衡控制受到影响,该模型的斜率变化必须非常缓慢地进行。使小车直立时整个研究过程中的基本要求,只有小车平衡了才能够运行。这也是小车系统中操作过程的难点,值得我们好好研究学习。
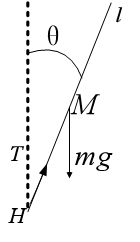
2.2平衡控制原理分析
平衡车模型是一个不稳定的非线性系统[2]。在重力的影响下,车体姿势本质上不稳定,导致在无外部控制情形下一定倾倒的现象,其受力如图2.1所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


