基于视频的车辆检测与跟踪算法研究毕业论文
2020-04-12 16:13:08
摘 要
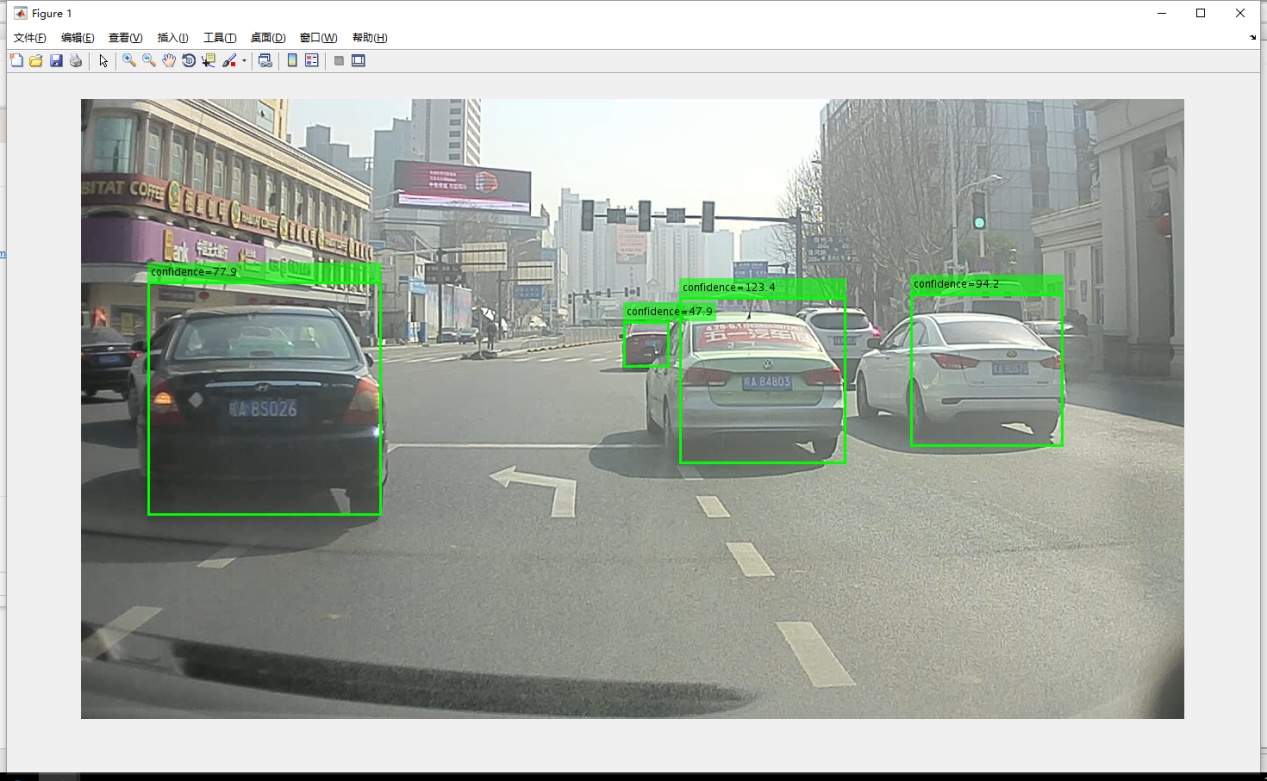
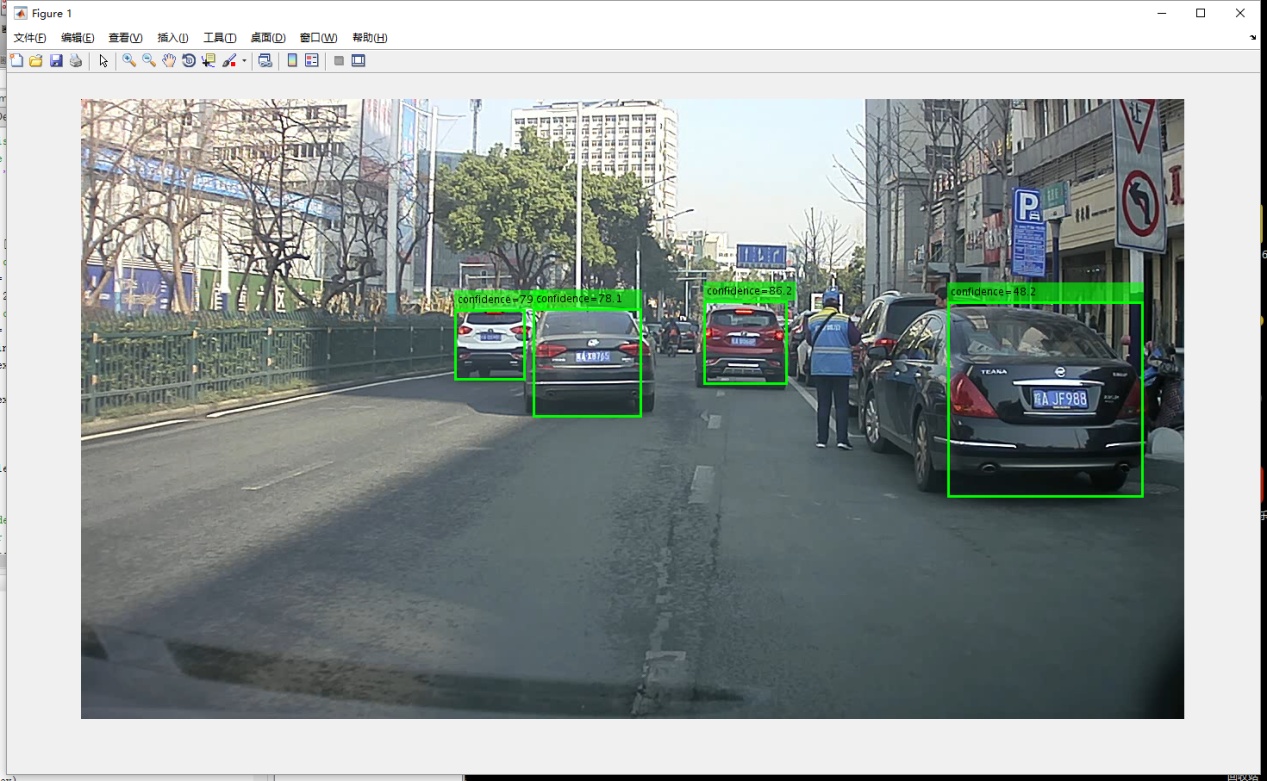
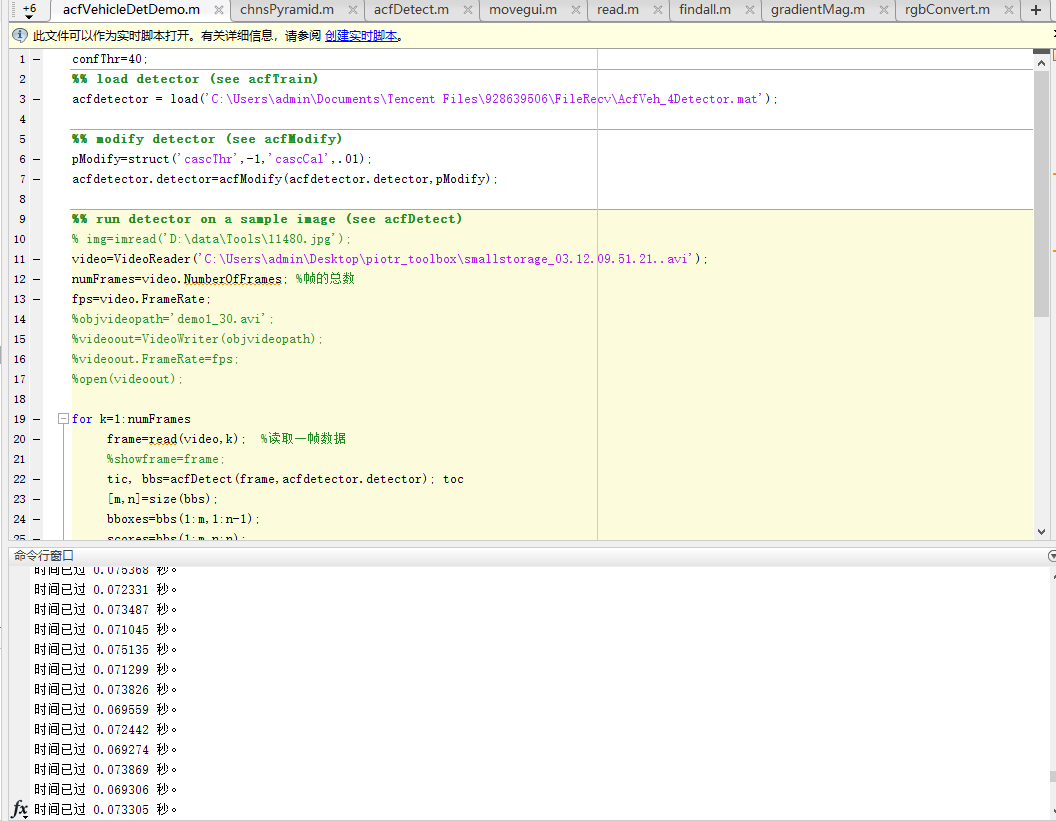
基于视频的车辆检测与跟踪算法在现阶段的生活与工作的运用中越来越多。本文介绍了这些年国内和国外的一些基于视频的车辆检测与跟踪技术,例如帧间差分法、光流法、背景差分法、检测线法等等。其中,自从viola和Jones(vj)的具有开创性的工作以来,大多数的基于视频的车辆检测与跟踪算法都是基于他们的研究工作的。但是,大多数的最新的检测器在计算更加丰富的图像时需要好几秒来处理单个图像,无法满足应用所需要的快速检测率。因为对检测速率的需求,本文介绍了acf检测算法与kcf跟踪算法完成了对视频的车辆与检测跟踪算法,acf检测算法有较好的检测率和检测速度。同样,作为车辆跟踪算法,kcf也在同类的车辆跟踪算法中具有较为优异的性能。本文最后利用matlab的工具箱完成了acf车辆检测的仿真,用opencv结合vs完成了对kcf车辆跟踪的仿真。
关键词:车辆检测;车辆跟踪;acf;kcf;
Abstract
Video-based vehicle detection and tracking algorithms are increasingly used in the current life and work applications. This article describes some video-based vehicle detection and tracking technologies at home and abroad during these years, such as inter-frame difference method, optical flow method, background difference method, detection line method, and so on. Among them, since the groundbreaking work of Viola and Jones (vj), most video-based vehicle detection and tracking algorithms are based on their research work. However, most of the latest detectors take several seconds to process a single image when calculating a richer image, failing to meet the fast detection rate required by the application. Because of the requirement of the detection rate, this paper introduces the acf detection algorithm and the kcf tracking algorithm to complete the video vehicle tracking and detection algorithm. The acf detection algorithm has a better detection rate and detection speed. Likewise, as a vehicle tracking algorithm, kcf also has superior performance in similar vehicle tracking algorithms. In the end, the simulation of acf vehicle detection is completed with the toolbox of matlab, and simulation of kcf vehicle tracking is completed with opencv combined with vs.
Keywords:Vehicle detectors; Vehicle tracking;acf;kcf
目录
第1章 绪论 1
1.1论文研究背景 1
1.2 国内外研究现状 1
1.2.1 车辆检测技术 1
1.2.1.1帧间差分法 2
1.2.1.2光流法 2
1.2.1.3背景差分法 2
1.2.1.4检测线法 3
1.2.1.5 本文采用的检测技术 4
1.2.2 车辆跟踪技术 4
1.2.2.1基于车辆模型的跟踪 4
1.2.2.2基于车辆区域的跟踪 5
1.2.2.3基于车辆轮廓的跟踪 5
1.2.2.4基于车辆特征的跟踪 5
1.2.2.5 本文采用的跟踪技术 5
第2章 acf车辆检测算法 7
2.1 haar adaboost算法原理 7
2.2 acf算法原理 8
2.2.1特征计算 8
2.2.2分类器学习 9
第3章 kcf车辆跟踪算法 11
3.1 线性回归 11
3.2 循环矩阵 11
3.3 结合 12
3.4 快速核心相关(fast kernel correlation) 13
3.4.1 点积和多项式核 13
3.4.2 径向基函数和高斯核 13
3.5 一般形式 13
第4章 实验结果及分析 15
第5章 结论 20
5.1 工作总结 20
5.2 未来的展望 20
参考文献 21
附录A MATLAB代码 23
附录B KCF代码 25
致谢 29
第1章 绪论
1.1论文研究背景
随着生活节奏的不断加快,交通情况逐渐成为人们关注的重要信息之一。随之诞生的便是智能交通系统(intelligent transportation system)。智能交通系统是一种综合交通管理,通过将先进的信息技术、数据通信和传输技术相结合,有效地集成和应用于整个交通管理中。其中包含电子传感技术、电子控制技术和计算机处理技术。
1.2 国内外研究现状
1991年,加州理工学院在高速公路上使用基于视频的车辆和检测和跟踪算法。对当时正在使用的各种基于视频的车辆检测技术进行了非常详细的分类。1994年,明尼苏达州交通部的MN/DOT对FHWA(联邦公路管理局)进行了非常严格的评估。结果表明,该视频探测器的效果非常令人满意。FHWA利用这种技术来提取更多的交通参数,如交叉路口的交通和车辆转向信息。国内对交通视频检测的研究水平与国外相比,技术基础薄弱,而且在初期不够得到重视,所以发展相对较慢。然而,许多公司都有对此方面的研究与成果,例如清华紫光视频流量检测系统VS3001、深圳神州交通系统有限公司开发的视频跟踪器、厦门恒神智能软件系统有限公司、公司开发的TM等。事实上,与其他车辆检测方法相比,基于视频图像技术的方法具有直观、宽监测范围、多类型交通参数、低成本等优点,可广泛应用于交叉口和高架交通监控系统。但是,随着视频车辆检测技术的逐渐发展,人们对车辆的检测的效率和准确率仍然不会满足。
1.2.1 车辆检测技术
现如今车辆检测的方法层出不穷。
Roberts Cross Edge Detector采用两个代表正交空间导数运算的微小内核(2x2)。这些滤波器的响应,非线性组合以获得边缘强度和方向的基本测量,可以被认为是ur通道。另一项早期工作是福岛的Neocognitron架构,它采用分层增强辨别力的渠道。在接下来的几十年中,出现了许多扩展。例如,Malik&Perona的纹理辨别方法采用了几十个通道,这些通道是通过一组带通滤波器的响应的非线性组合计算出来的。 Malik&Perona通过高斯平滑进行空间整合,使用基于直方图表示的最终统计数据今天仍然很流行。
不久之后,Viola和Jones提出了一种前端物体检测方法,该方法避开了使用积分图像实现的高效Haar-like小波计算昂贵的带通内核。尽管如此,随着计算能力的迅速提高,计算一组带通滤波器的响应变得不再是瓶颈。
现如今所有检测方法大致分为下面4种方法。
1.2.1.1帧间差分法
帧间差异是基于对运动图像序列中两个相邻帧之间的关系的分析的检测方法。
在高速的情况下,帧间差分法的操作简单,而且检测速度比较快,车辆定位也比较准确。它有以下几个缺点:第一,对于速度较慢或者静止不动的物体,它没有办法测量。第二,对于运动速度比较高的对象,真实目标会远远小于分割区域。速度过快的物体会导致分割区域过大,导致检测的效果非常不好;第三,如果目标中的灰度比较均匀,相邻的帧之间的差距会比较小造成重叠部分形成非常大的空腔,会导致分割结果不在一起,物体目标的识别会出现问题。
1.2.1.2光流法
光流场方法的原理是:在三维空间中,运动场可以用来描述运动的过程,而在二维平面中,物体的运动可以用图像中各个像素点的灰度值变化来反应。光流场相对于运动场,就是三维空间相对于二维空间。光流场可以表现图像中各个像素点的运动趋势。它也是实际运动场的二维表现。
在相对理想的情况下,就算不知道任何有关场景的信息,也能够检测出独立运动的物体,物体的运动速度,可以被很准确的计算出来。然而,光流法存在以下缺点:有时,即使没有运动,也可能因为外界的光照改变时观察到光流。此外,在灰度变化不够的区域中,经常没有观察到实际的运动。三维物体的运动可以通过二维图像像素点的变化来反应。但由于某些信息的丢失,光流法中存在许多的问题,例如光阑问题和遮挡问题。因此这种情况无法用光流法估计运动轨迹。必须用其他的模型来仿真运动。分割精度可以用各种空间特征来提升。同时,光流法采用迭代法计算复杂耗时。如果硬件性能达不到要求的话,检测速度很难达到应用的要求。
1.2.1.3背景差分法
背景差分法首先选择背景图像,就是多个图像的平均值。然后减去背景和当前帧以消除背景。如果像素数量大于特定阈值,则确定在视频中存在正在移动的物体,运动目标就可以通过这种方式获得。
差分方法对复杂背景下的运动目标有非常好的效果,可以提供最完整的特征数据,具有较小的计算量和较大的实用价值。缺点是很容易受光线和天气等外界条件的影响。
背景差分法是运动分割中最常用的方法。实际上,它的具体应用需要某些算法来动态更新背景模型。目前,大多数人致力于如何实现背景图像的建模和自适应更新,使得背景可以接近并保持理想状态,以减少场景变化对视频图像检测和分割的影响。
背景建模是通过视频序列的帧间信息来估计和恢复背景场景。背景建模的主要方法是基于统计的背景模型、基于卡尔曼滤波的背景模型和基于高斯分布的背景模型。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


