基于solidworks的RTG40起升机构设计及虚拟装配毕业论文
2020-04-12 16:26:09
摘 要
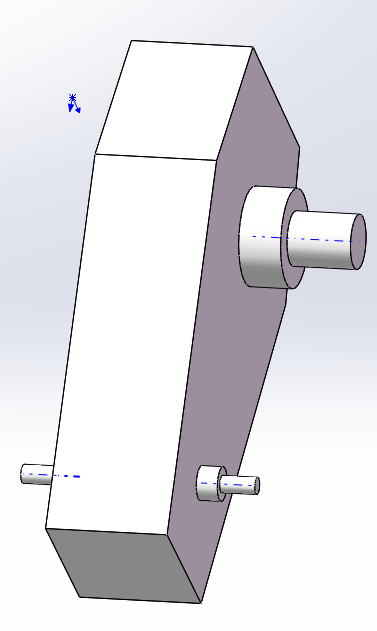
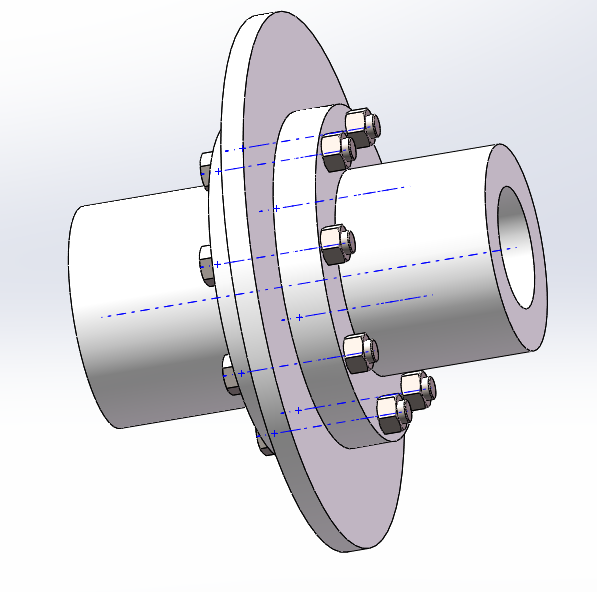
本文在给定RTG40基本参数的基础上,进行了对起升机构减速器、卷筒、电机、联轴器、制动器以及钢丝绳卷绕系统的计算和选型,并进行了强度和稳定性校核,完成了工作循环时间计算。利用AutoCAD绘制了主要零部件、起升机构及整机的三视图;利用SOLIDWORKS完成了对各零部件的建模并进行了虚拟装配。
论文主要研究了RTG40起升机构各零部件的作用及运行方式以及对整机工作的影响。
研究结果表明,本台轮胎式集装箱龙门起重机的起升机构能满足给定的起升速度、加速度、起重量等要求。
本文的特色:以计算为主,辅以部分CAD及SOLIDWORKS图片进行形象地介绍,条理分明,具有很强的逻辑性和说服力。
关键词:工作循环时间 传动方案 钢丝绳卷绕系统 过载校验 减速器 联轴器 高速浮动轴
Abstract
This article is based on the basic parameters of a given RTG40 ,the calculation and selection of hoisting mechanism reducer, drum, motor, coupling, brake and wire rope winding system are carried out. The strength and stability were checked, and the working cycle time was calculated. The three views of the main parts, lifting mechanism and the whole machine were plotted by AutoCAD.SOLIDWORKS is used to complete the modeling and virtual assembly of all parts.
This paper mainly studies the function and operation mode of each part of RTG40 lifting mechanism and its influence on the whole machine work.
The research results show that the lifting mechanism of the Longmen container crane can meet the requirements of lifting speed, acceleration and lifting weight.
The characteristics of this article: Take the calculation as the main part, supplemented by some CAD and SOLIDWORKS pictures to make an introduction.
The alticle is clear,logical and persuasive.
Key words: working cycle time transmission plan steel wire winding system overload check reducer coupling high speed floating shaft.
目录
第1章 绪论 1
1.1引言 1
1.2 国内研究现状 1
1.3 国外研究现状 1
1.4 起重机的组成及基本工作原理 2
1.4.1 工作机构 2
1.4.2 金属结构 2
1.4.3 动力装置及控制系统 3
1.5 主要设计内容 3
1.6 设计方法介绍 3
第2章 设计初始参数 5
2.1基本参数 5
2.2载荷计算 5
第3章 工作循环时间计算 7
第4章 起升机构的设计 12
4.1 起升机构传动方案的确定 12
4.2 八绳防摇机构的设计 13
4.3 钢丝绳的选取 13
4.4 滑轮的选取及相关尺寸的确定 14
4.4.1滑轮直径 14
4.4.2滑轮绳槽尺寸 15
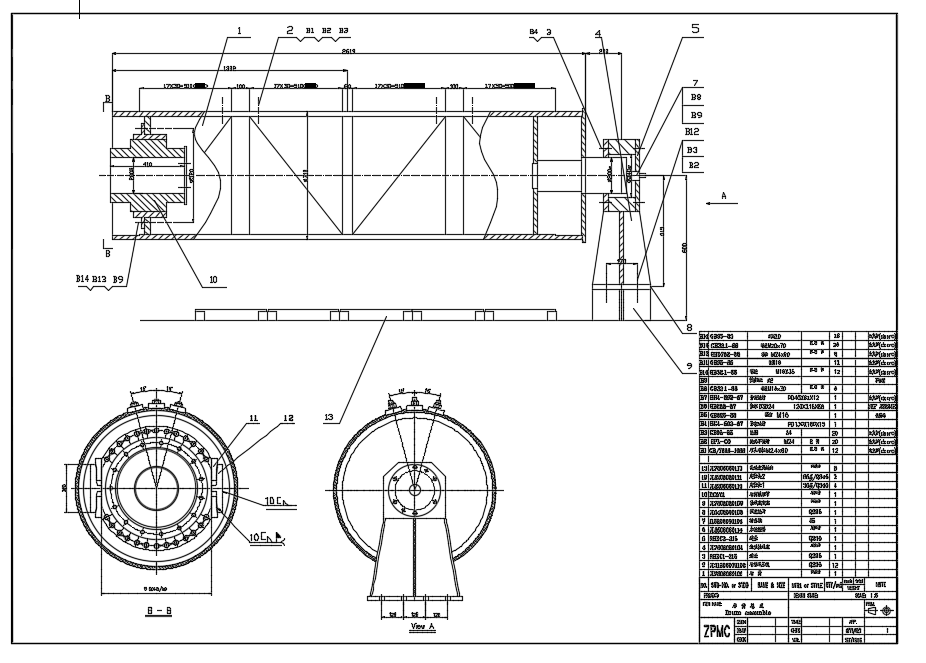
4.5 确定卷筒尺寸并验算强度 15
4.5.1卷筒直径 15
4.5.2卷筒长度 16
4.5.3卷筒壁厚及卷筒的验算 16
4.5.4卷筒的绳端固定 17
4.5.5卷筒的转速 18
4.6 电机的选型及校核 18
4.6.1 起升静功率 18
4.6.2 加速功率 19
4.6.3 转动惯量加速功率 19
4.6.4 电机的发热校验 20
4.6.5 电机的过载校验 20
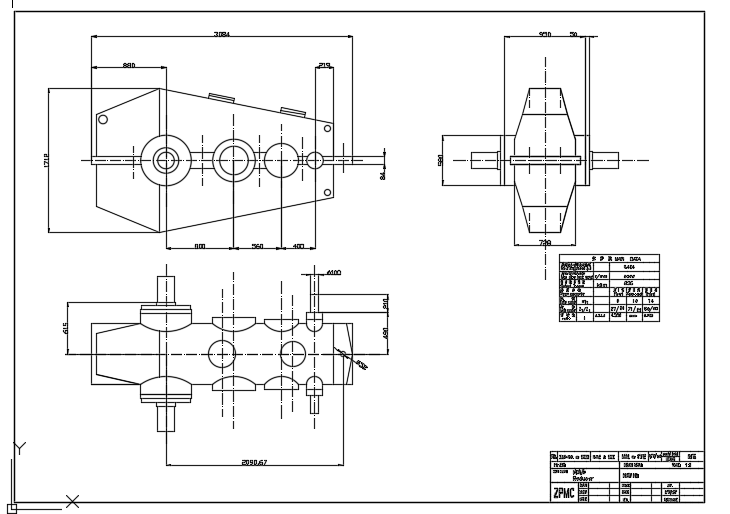
4.7 减速器的选用 20
4.8 联轴器及制动器的选型 22
4.8.1 高速轴联轴器的选型 22
4.8.2 低速轴联轴器的选型 22
4.8.3 制动器的选取 22
4.8.4 起、制动时间验算 23
4.9 高速浮动轴验算 24
4.9.1 疲劳验算 24
4.9.2 强度验算 25
第5章 环境影响与经济性分析 26
5.1 环境影响分析 26
5.2 经济性分析 26
第6章 结论 27
致谢 28
参考文献 29
第1章 绪论
1.1引言
本论文工作旨在对RTG设计中起升机构存在的不足之处进行改进与优化,设计出额定起重量为40t的RTG起升机构,并实现虚拟装配,让自己在选型设计及计算过程中深入理解RTG的工作原理及安装方法,深化对专业知识的认识并为之后在实际工作中的应用积累经验。
RTG全称轮胎式集装箱门式起重机,在各大港口的集装箱码头均作为主要设施使用。RTG的运行方式为轮胎支撑方式,输出来源使用柴油发动机,主要功能为实现集装箱的装卸和堆垛作业。RTG同时具有RMG(轨道式集装箱门式起重机)大堆场作业和高效率的特点以及轮胎式港口机械的灵活性能,能够在大堆场灵活运行,同时具备高空间利用率、较高生产率和大堆场机动的优势。此外,RTG与各类岸边集装箱起重机配套产生的集装箱码头生产装卸工艺系统,存在生产装卸效率高、吞吐量大、成本低,不难实现自动化和智能化操作得各种优势。目前,RTG已成为现代化集装箱堆码头的主要起重机机型[1],而起升机构作为起重机的核心机构,它的优化设计以及生产装配工艺的研究具有十分重要的现实意义。
1.2 国内研究现状
伴随着当今国内港口的蓬勃发展以及政策上的优势,RTG起升机构的规格和各种参数要求日益提高。RTG金属结构的重量以及其起重量的提高会导致轮压的增加,从而造成一些码头基建受到破坏;由于起升高度的提高,传统的机械式或液压式防摇机构效果不理想,而新的八绳防摇机构建设及维护成本高,小车及钢丝绳布置复杂;采用柴油发电机组的RTG的排烟问题所引起对环境的破坏,现行的油改电方法对储能元件的要求又非常高;起升机构的布置形式有很多不便安装或者占用工作空间较大,需要进行改进。由于国内开始建设专业化集装箱码头的时期与轮胎式集装箱门式起重机码头堆场作业方式在国外风靡的时期刚刚吻合[2],因而,国内各大港口集装箱码头使用这种工艺方式持续了很长时间。
国内RTG无论从性能上还是质量上与国外一直存在着一定的差距,钢丝绳的疲劳程度一直较高且难以被检测,导致事故频发;零部件的性能以及工艺性较差,使用寿命较低,与金属结构的交互较差;安全性能比较差,且RTG上的安全装置不够完善;维护保养较为困难,主要是因为模块化的生产工艺体系没有建立。国内RTG的设计和制造发展情况相对良好,技术水平也在不断提高,然而与国外早已成熟的RTG标准体系尚有差距,发展空间相当巨大。
1.3 国外研究现状
在国外,一般认为,在相同的堆场提升了货物量之后, RTG 在密度增加的情况下难以操作,在RTG本身结构的限制下,位置监控和自动纠偏很难进行 ,维修次数频繁,由于对司机的专业化程度要求高导致成本较高 ,自动化和智能化很难实现,而以柴油机作为动力来源,其环保性能很差。国外已经采取和准备实施了各种相关的技术措施有助于改进 RTG 的这些问题。由于RTG 大型化导致的堆箱高度急剧增加,使得在低能见度的日夜工作中,驾驶员很难看到标记线,形成安全生产的隐患。然而 ,目前几乎所有的大型 RTG 供应商都能提供各种技术方案来解决此类问题, 如KalMAR的SimTRAIL、DOKKWAT、Noel-Calk系统、HunDayi重工、HunDayi重工业、利勃海尔等[3],以及相应的利用G tting KG 的控制技术和ZPMC公司开发的相应的控制技术。利勃海尔利用高精度的生产工艺,采用高标准的发动机, 在降低噪声、减少能耗和污染排放量方面独树一帜;Kalmar 于2002 年向港口Olso提供了4台全电气驱动的RTG设备 ,铺设高压电缆并利用高压电缆供电,创造了 9 列集装箱插入1 车道的大堆场布局[4],并且使得起升高度满足“堆4过5”的基本要求。国外公司主要在高密度堆存方式,位置纠偏及自动监控,减少维护工作量和成本,实现自动控制,增加发动机的环保性能等几个方面进行了创新和改进,随着技术的进步, 这些情况也将循序渐进地得到改善,而且对有些港口的集装箱堆场码头来说 , 解决这些问题并非刻不容缓[5]。
此外,RTG的材料和制造工艺也在逐步得到提升,高强度材料和高精度、高效的制造工艺有利于RTG加工质量的提升和成本的降低。由于集装箱对位的困难,要求有较高操作的司机,因而所支付的人工费用相对昂贵,而效率又不够高,因此国外在传感器及RTG智能化方面取得了较大成果。国外在钢丝绳断裂检测以及计算机载荷信息分析方面也处于一个领先的地位,先进的计算机技术能够提前预警从而减少事故的发生,RTG的安全性能大大增加。RTG的各部分已经开始实现标准化模块设计,使得生产维修更加方便快捷。由此看来,RTG的正在向智能化、自动化、数字化的方向蓬勃发展。[6]
1.4 起重机的组成及基本工作原理
1.4.1 工作机构
工作机构是起重机械不同运动的执行机构,它的作用是利用机构的配合运行,产生货物在空间的移动并且实现一些重要操作,比如货物的装卸、转载、搬运和安装。[7]起重机一般包含四大工作机构,分别是起升机构、运行机构、变幅机构及回转机构。起升机构在四大工作机构中是各种起重机械的基本工作机构,任何的起重机都不可缺少起升机构,而其他机构则起到配合起升机构工作以及实现货物搬运的功能。[8]
1.4.2 金属结构
金属结构起到起重机械的骨架作用,完成起重机械作业空间的构建,主要功能是支承和承力,用来工作机构及动力装置的安装和起重机的外形的形成。[9]
1.4.3 动力装置及控制系统
起重机械最常用的动力装置是电动机和柴油机,而RTG控制系统(如变频器)可以实现工作机构的启动、调速、倒车、制动和停车等动作,另外还包括安全保护装置及照明装置等。
1.5 主要设计内容
- 集装箱门式起重机的起升驱动装置有电机轴和卷筒轴平行布置和垂直布置两种形式,由于原则一般是布置方式应紧凑,我们使卷筒轴与电机轴平行布置;
- 确定起升机构的传动方案,进行滑轮组的选型计算工作,确定钢丝绳、滑轮、卷筒的主要尺寸并验算强度,选择电动机并验算其发热条件及过载条件,选择减速器、制动器和联轴器并校核其强度,验算高速浮动轴静强度及疲劳强度,校核起升速度、起升加速度及减速度是否满足参数要求,查阅起重机设计手册确定计算标准以及具体的指标体系;
- 外文资料翻译和文献资料阅读;
- 编写设计计算说明书;
- 利用AUTOCAD完成轮胎式场桥RTG40起升机构的总体设计,结合其他机构的设计完成整机的CAD图;
- 学习SOLIDWORKS,实现岸边集装箱门式起重机起升机构的虚拟装配。
1.6 设计方法介绍
港口起重机械包括但不限于以下四种设计方法:如信息化设计、合作式设计、模块化设计、环保设计等。设计方法的根本基础是产品的质量,因为港口起重机械的质量要求决定了整机和零部件的寿命。在设计过程中一般只使用一到两种方法以达到设计要求。本论文仍以传统设计计算为主,以提升基础能力。在结构设计方面,RTG主要采用结构计算和机构计算的设计方法,机构计算涉及的机构有:起升机构、运行机构、回转机构、变幅机构等,同时,需要进行卷筒、各类轴、钢丝绳滑轮组、电机、减速器、制动器以及联轴器等部件的选型设计[10]。在起重机设计规范中,可以在标准统一的计算方法下对起重机的金属结构、机构以及零部件进行详细的计算。
论文设计主要参考《起重机设计规范》及《起重机设计手册》,采用最新的国家标准,进行零部件的选型计算以及校核工作,绘制起重机总图、起升机构部分零部件的图以及起升机构布置图并进行起升机构的虚拟装配。
第2章 设计初始参数
2.1基本参数
参数名称 | 数 值 | 备 注 | |
额定起重量t | 吊具下 | 40 | |
含吊具及上架 | 51 | ||
起升速度m/min | 额定载荷 | 20 | |
空载 | 40 | ||
起升加速时间s | 额定载荷 | 20 | |
空载 | 4 | ||
起升减速时间s | 额定载荷 | 2 | |
空载 | 4 | ||
跨距m | 23.47 | 堆六列,集卡边置 | |
起升高度m | 15.24 | 吊具下,堆四过五 | |
基距m | 6.4 | ||
柴油机电动驱动 | |||
整机工作级别 | A7 | ||
轮压t≤ | 32 | ||
2.2载荷计算
起升机构载荷作用特点:
- 货物起升下降时,在驱动装置上由钢丝绳拉力产生的扭矩方向不变;
- 由于货物惯性所引起的附加转矩对机构影响很小;
- 机构起制动时间与稳定运行时间相比可以忽略不计,因此可以把稳定运行时的起升载荷作为机构的计算载荷。[11]
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


