汽车齿轮包装自动化设计毕业论文
2020-04-12 16:36:55
摘 要
本次设计说明书先对包装自动化以及工业机器人两部分现今情况进行说明;接着总结出本次设计的目的、意义以及技术路线、方案;然后通过多种方案的比对来确定最终设计方案;其次是对输送部分的选型,以及带式输送机功率、输送能力、最大工作张力、层数等参数的相关计算;再其次是对输送机剩余零部件传动滚筒、改向滚筒、上下托辊、机架、中间架、头架等部件的选取;紧接着是对选取部分要求到需要校核的零部件进行校核;接着是对方案中出现的搬运机器人进行选型,以及两种末端执行器的设计与计算;最后是对产品运输包装箱的选取与计算,以及缓冲衬垫的设计与计算。通过一系列的工作,汽车齿轮包装自动化设计,并对其建模以及完成图纸设计。
关键词:包装自动化设计、输送机、工业机器人
Abstract
This design instruction first explains the packaging automation and the two parts of the industrial robot, then summarizes the purpose, significance, technical route and scheme of the design, and then determines the final design by comparison of various schemes; secondly, the selection of the conveying part and the work of the belt conveyor. The relative calculation of the parameters such as rate, transport capacity, maximum working tension and number of layers, and then the selection of the transmission rollers of the remaining parts of the conveyor, the reformed roller, the upper and lower roller, the frame, the middle frame, the head frame, and so on. The selection and calculation of the two terminal actuators are presented in the case and the design and calculation of the selection and calculation of the packing box for the product, as well as the design and calculation of the cushioning pads. Through a series of work, the automobile gear packaging automation design, and modeling and completion of the drawing design.
Key words: packaging automation design, conveyor, industrial robot
目录
第1章 绪论 1
1.1包装自动化生产线的发展现状 1
1.2工业机器人的发展现状及趋势 1
1.3设计目的、意义及技术方案 3
1.3.1设计目的及意义 3
1.3.2设计技术方案 3
第2章 设计方案 5
第3章 输送部分的设计与计算 7
3.1输送机的介绍及选型 7
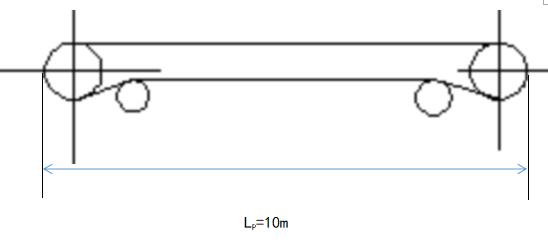
3.2原始数据 7
3.3带速的选择 8
3.4带材料的选择 8
3.5带宽的选择 8
3.6输送能力计算 8
3.7功率计算 9
3.8电动机功率计算 10
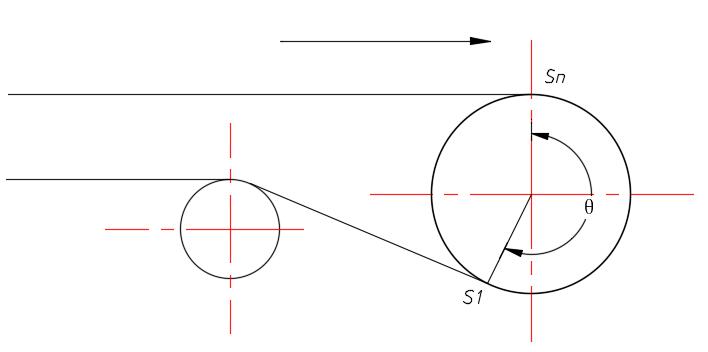
3.9最大张力计算 10
3.10输送带层数的计算 11
3.11本章小结 12
第4章 QD80型输送带零部件设计 13
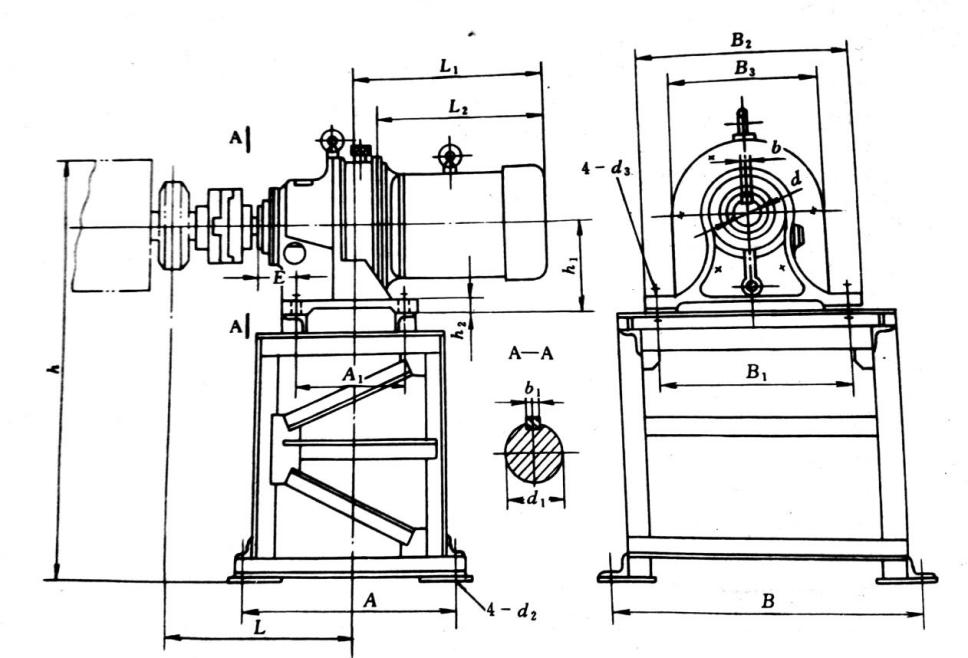
4.1驱动装置 13
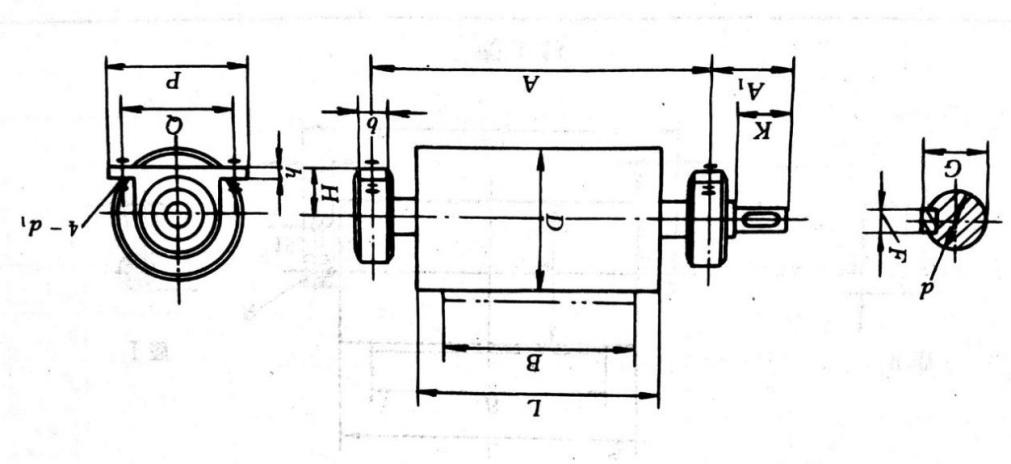
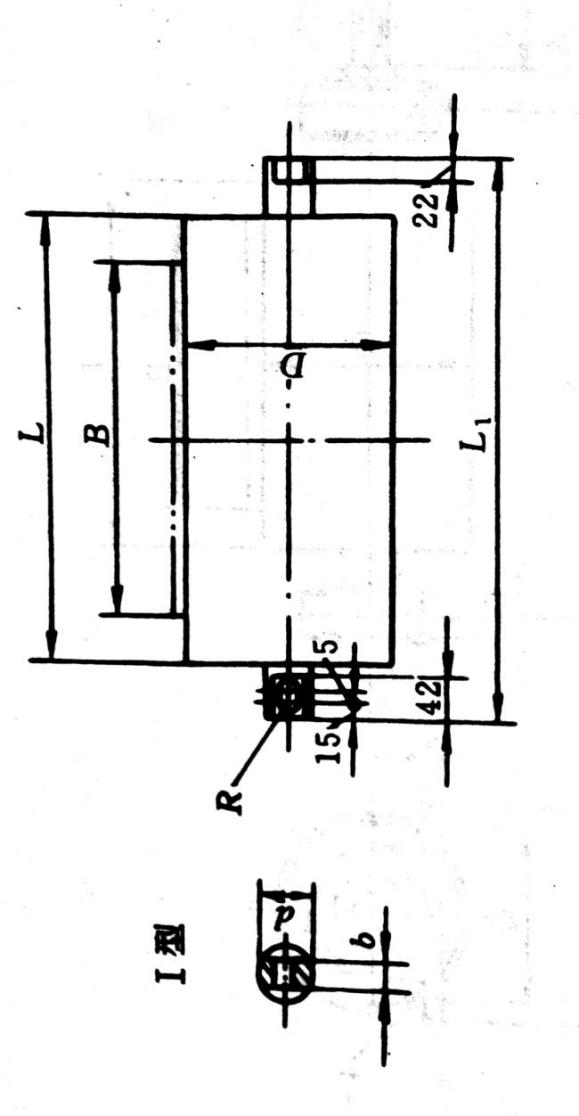
4.2传动滚筒的设计 13
4.2.1传动滚筒扭矩校核 15
4.2.2改向滚筒的校核 15
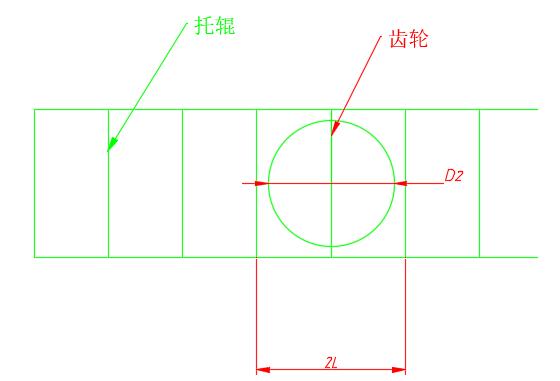
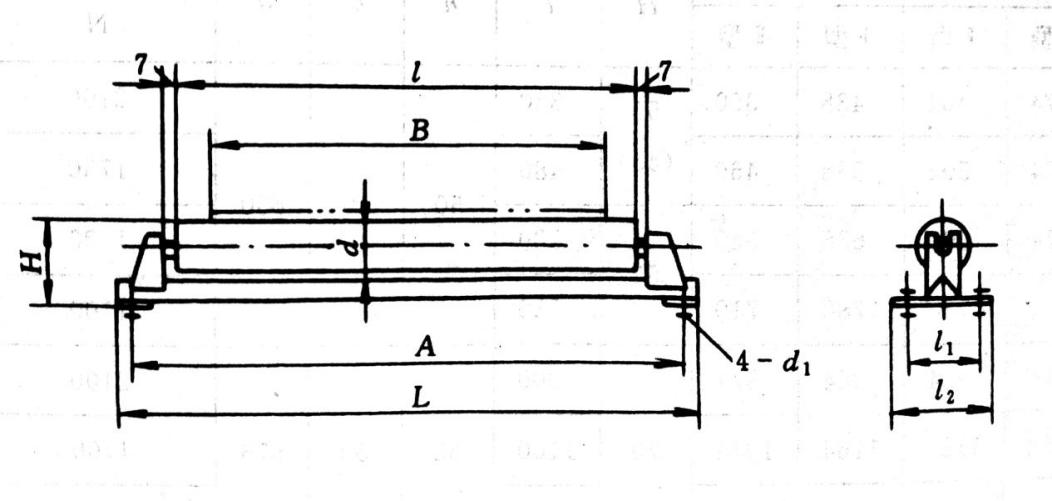
4.3托辊组的选取 16
4.4上下托辊校核 18
4.4.1上托辊校核 18
4.4.2下托辊校核 18
4.5头架的选取 19
4.6中间架及中间支架的选取 19
4.6.1中间架的选取 19
4.6.2支架的选取 20
4.7尾架的选取 21
4.8拉紧装置 21
4.9输送机单位长度荷载校核 22
第5章 22
第5章 机器人的选型与设计 23
5.1工业机器人的选型 23
5.2末端执行器的设计 23
5.2.1齿轮末端执行器设计 23
5.2.1衬垫板末端执行器设计 24
第6章 围板箱的设计与计算 25
6.1围板箱的介绍 25
6.2围板箱的选取 25
6.3缓冲衬垫板的设计 26
6.3.1材料的确定 26
6.3.2厚度的确定 26
6.4最终装载方案 27
第8章 28
第7章 结论 29
参考文献 30
致谢 31
第1章 绪论
1.1包装自动化生产线的发展现状
随着人们生活品质日益提高,生产需求与市场需求之间差距拉开,这就需要去提高生产,而科学技术的提高改变了两者间的关系,自动化在生产中的运用极大地提高生产效率、降低人力成本[1]。而包装自动化生产作为其中的一部分,尤其是食品的包装,不仅对企业带来了高的生产效益,更重要的是对消费者带来了更加健康、环保、质量更高、外形美观的产品[2],因为自动化包装生产精度高,所以产品的外观更加美观、整齐[3],包装封口更加严密,这样的生产条件,无疑增加了产品的市场竞争力,使企业获得更高的经济效益,可以说这样的生产线是产品能够增加产量,那满足市场需求的根本保障,在包装生产线用工成本日益增高的情况下,对于开发出效率更高、经济环保、精度更高的包装自动化生产线,人们更加渴望,企业更加渴望。
从发达国家,如美国,对多个包装行业生产线所开展的调研报告数据中可以看得出,使用自动化生产线可使劳动力费用节省50%,生产能力提高12.5%,产品的质量也明显提高。上世纪80年代后,自动化生产线在机械、铸造、汽 车、造纸等企业的加工环节中得到了广泛的应用。BMW通过龙门式自动化生产线在各个加工中心之间完成发动机缸盖的上下料工作,REIS公司将多系列的自动化生产线结合运动学原理运用到自动化搬运、组装零件中,让自动化生产得以完成[4]。
由上面的数据可以看得出,自动化给人们的生活带来了多大的利益,包装自动化生产线慢慢地发展到今天基本每个包装企业都出现多多少少的自动化设备[5],或许是全自动生产线,或许是半自动生产线,或许是两者结合,总之现如今工业中,已经走向自动化的生产道路,而如果想要设计好这样一条生产线,就必须了解所研究产品的生产工艺、产品特点、所需工作环境等。
1.2工业机器人的发展现状及趋势
工业机器人是针对不同行业所设计出来提高生产的智能机械设备,同时通过计算机系统控制,根据提前设定好的程序,可以比人类更灵活、更出色的完成一些生产任务[6]。机器人的发展已经对现如今各个行业产生了巨大的影响,它的技术水平代表着这个国家科学技术的先进程度,可以说,它是生产行业的代名词,标志性的机械设备[6]。 据市场上现有的数据表明,工业机器人对整个汽车行业带来了很大的影响,而且比较先进的机器人技术也主要出现在汽车行业,该行业对这种先进产品的使用占整个机器人市场的61%,剩下的金工行业占8%、塑胶行业和电气电子产业分别占7%,传统的食品业占2%,剩余所有使用机器人的行业占15%[7]。
近年来,各个行业的突飞猛进式发展,但离不开计算机技术的支持,受其影响比较大的便是机器人行业,计算机技术的革新使得机器人生产以及其服务领域也不断地扩大和深化,桥梁建筑、农林牧渔、采煤采矿、救援行动、办公家用、医疗卫生、科研教育、生活服务、国防军事等非制造业行业对机器人的需求越来越大[8],机器人产业早已成为了高新技术的代表,成为了未来生活的前奏,而上面提到的工业自动化更是离不开机器人的运用,机器人与生产相结合,改变了人们的生活,改变了人类科技的步伐,是人类历史上一项比较重要的技术革命,未来的机器人将为人们提高生活质量、生活水平起到很重要的作用,在历史的长河中也将扮演着重要的作用[9][10]。
我们国家的机器人已经改变以往的面目,中国市场上已经出现了很多研发机器人的的企业,它们的崛起让全世界人们见证了中国技术的革命,中国的发展。根据我国机器人的发展历程可以将其分为三个阶段:
第一个阶段是示教在线机器人的出现,该机器人包括三部分,主体、控制系统、示教盒,因为它的出现比较早,人们的认知相对简单,所以它的操作也不是很复杂。该机器人的工作原理简单明了,利用他的示教装置进行在线编程,并对所编的程序存储。到了机器人工作时,举个简单通俗的例子来说,当你把你知道的东西灌输到另一个人的大脑里,那个人就会按照大脑里储存的信息,来完成相关的工作。
第二个阶段是离线编程的机器人,第二代机器人比第一代机器人更加的像人类,它是以计算机的模拟仿真技术。开始时,对工作环境的尸体模拟,包括机器人,然后通过计算机,利用特定的算法,对之前建立的模拟实体进行控制和使用,再在离线的前提下,对机器人的行为动作进行设置,紧接着再利用计算机的模拟仿真计算编程,检查该过程是否有效,最后将最终的正确程序输入机器人的控制系统。
最后一个阶段,更加智能的机器人登上历史的舞台,出现在人们眼前,为什么说它智能呢?是因为它除了那些繁琐的传感部件,它具备了第一代和第二代机器人所不具备的感知能力,它有了自己的“思想”,对工作环境的自行辨别,还能将所接收到的信息储存,对于各种条件恶劣的工作环境,它可以出色、有序地完成,对于这种机器人,它的灵活性、智能化加入到工业里面,带来了巨大的改观,尤其是焊接和搬运码垛的工作中,在中国,机器人技术水品的落后以及发展的时间比较晚,目前机器人大多数运用在制造业,其他行业,比如生活服务、教育等涉及比较浅[11]。
中国的机器人发展始于1985年左右,国家的发展战略中对机器人的也开始鼎力支持,从刚开始的零认知,到现在的自主研发、自主创新,有了一个质的飞跃,改革开放以来,国家对工业加大了投入力度,虽然如此,但是技术跟不上生产的步伐,市场的需求,所以,到目前为止,中国还属于一个机器人消费大国,机器人所需要比较重要的零部件还得依赖进口,不过企业之间的竞争才有了技术的革新,随着市场的需求,中国目前面临的问题会得到解决[12]。
1.3设计目的、意义及技术方案
1.3.1设计目的及意义
近几年来,随着包装产业的逐步发展,其产业结构变得更加的复杂、比较完整和多样化,发展的也更加全面,包装不仅仅意味着表面的销售效果,它还涉及到运输以及生产方面,虽然说国内部分企业实现了包装自动化,但仍然落后于发达国家,在我国,包装行业发展起点低、时间晚,但是发展速度比较快,正在慢慢地赶上发达国家的水平,我国包装自动化依然还有很大的发展空间。包装自动化机械设备的出现主要是由于市场的需求, 现代社会经济逐渐发展, 各类型的产业不断出现, 而机械与汽车两大产业作业传统产业,也逐渐成为是包装设备需求的两个产业, 引起市场需求不断的提升, 推动了包装产业的发展, 使得企业的生产线自动化程度更高,效率更高,生产速度更快,目前世界各国的包装自动化水平均有明显的上升趋势[13]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


