基于C 编程的机器人行走技术研究与实现毕业论文
2020-04-12 16:46:37
摘 要
本文借助对于DARwin OP2机器人的研究,对智能机器人的应用前景及其实用性做出探讨。随着人工智能领域相关学科的快速发展,人形机器人成为当今机器人研究中最为热门的研究方向之一[[1]]。为了让人形机器人被广泛应用在人类日常生活中,它们需要具备在人类环境中的自主行走能力,而其中的最关键的一个方而就是在行走过程中能避开障碍物。研究的内容主要涉及到机器人视觉和人形机器人的路径规划方法,这是将机器人应用到工业生产以及生活工作相关活动中的必须研究范畴,也是国内外目前正在攻克的技术关卡。
本文主要研究了关于DARwin OP2机器人行走的编程问题,同时研究了其舵机控制方法与达成其动作目标的关系。本文使用诸如Putty等SSH连接软件作为开发工具,使用C 语言作为开发语言,实现了对机器人关节舵机的控制,并使其完成行走功能。
研究结果表明:通过对机器人的各舵机进行编程控制,结合其舵机动作参数,可进行对DARwin OP2机器人的动作控制,通过C 语言的编程,可使其实现行走动作。
本文的特色:本文阐述了在对DARwin OP2机器人进行行走功能实现中的主要步骤以及所要注意的事项,可以引导大家对DARwin OP2机器人进行简单了解。
关键词:DARwin OP2机器人;C 语言编程;行走;舵机控制。
Abstract
With the help of the research on DARwin OP2 robot, the application prospect and practicability of intelligent robot are discussed in this paper. With the rapid development of related disciplines in the field of artificial intelligence, humanoid robots have become one of the most popular research directions in robotics research. In order to make humanoid robots widely used in human daily life, they need to have the ability to walk autonomously in the human environment, and the most important part of them is to avoid obstacles in the course of walking. The research content is the problem of autonomous obstacle avoidance in the walking process of humanoid robot, which involves the path planning method of robot vision and humanoid robot, which is a necessary research category to apply robots to industrial production and activities related to life and work. It is also a technical barrier at home and abroad.
This paper mainly studies the programming problem of DARwin OP2 robot walking, and studies the relationship between its steering control method and its action goal.
The results show that the action control of the DARwin OP2 robot can be controlled by programming control of the steering gear of the robot and the motion parameters of the rudder, and the walking action can be realized through the programming of the C language.
The characteristics of this article: This article describes the DARwin OP2 robot programming control issues and the exploration process, can guide people to a simple understanding of the DARwin OP2 robot.
Key Words:DARWIN OP2 Robot;C Language programming;Walking;Rudder control
目 录
第1章 绪论 1
1.1 DARwin OP2机器人简介 1
1.2 国内外现状及发展趋势 2
1.3 本文的主要工作和论文结构 3
第2章 DARwin OP2机器人介绍 5
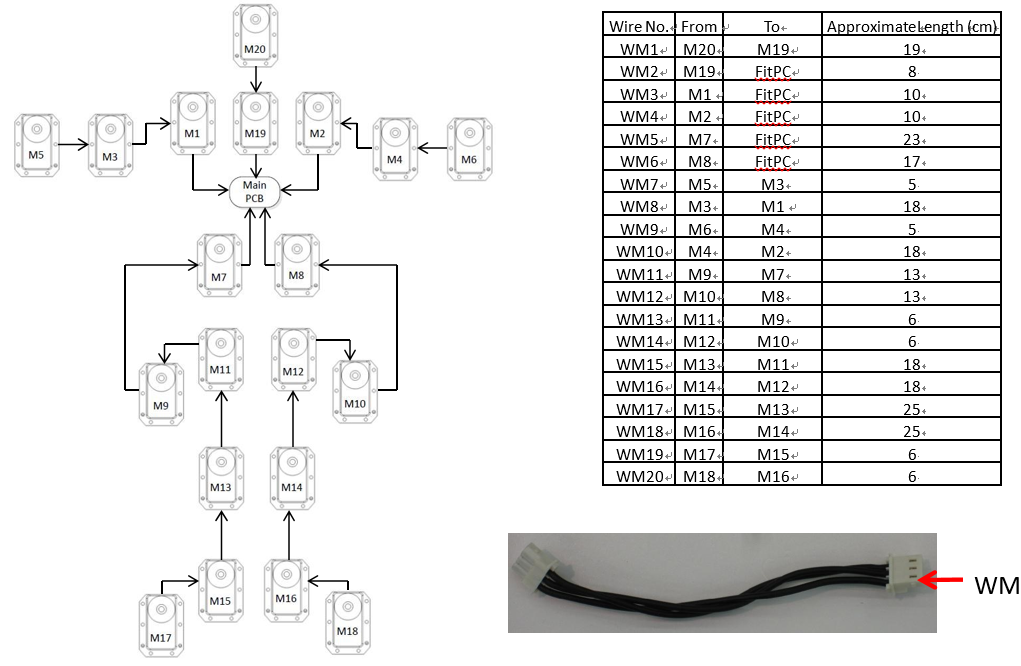
2.1 DARwin OP2机器人结构介绍 5
2.2舵机相关简单介绍 6
2.3 DARwin OP2机器人MX-28舵机结构介绍 7
2.4 DARwin OP2机器人行走控制结构介绍 9
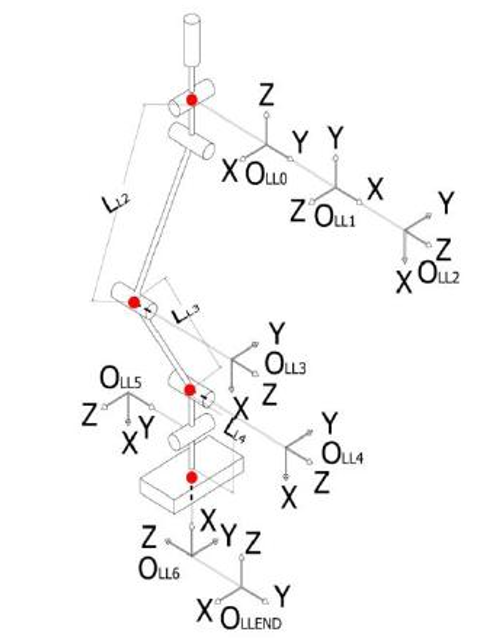
2.4.1 DARwin OP2足部轨迹生成 10
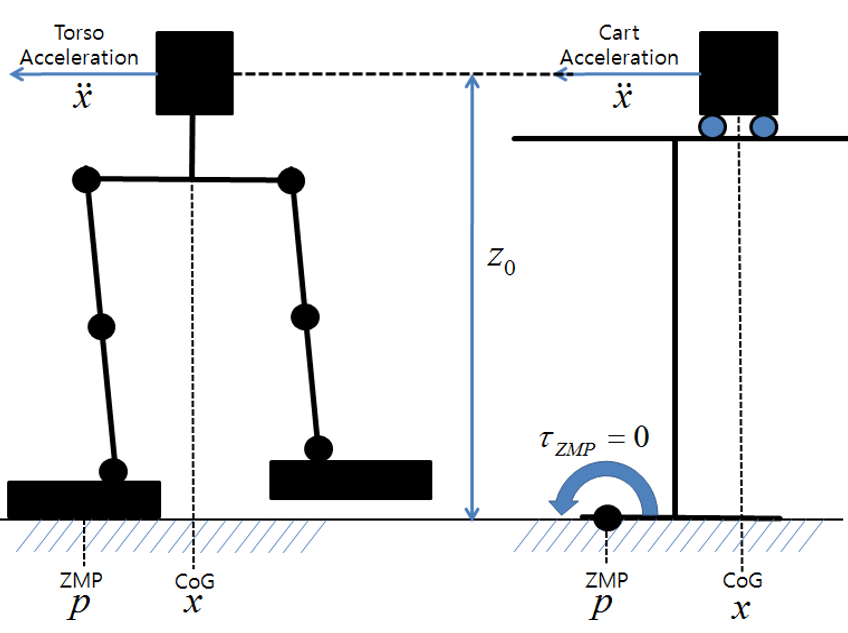
2.4.2 DARwin OP2机器人ZMP准则 11
2.5 国外仿人机器人行走功能实现介绍 13
第3章 设计方案比较与选择 14
3.1 连接DARwin OP2与你的电脑 14
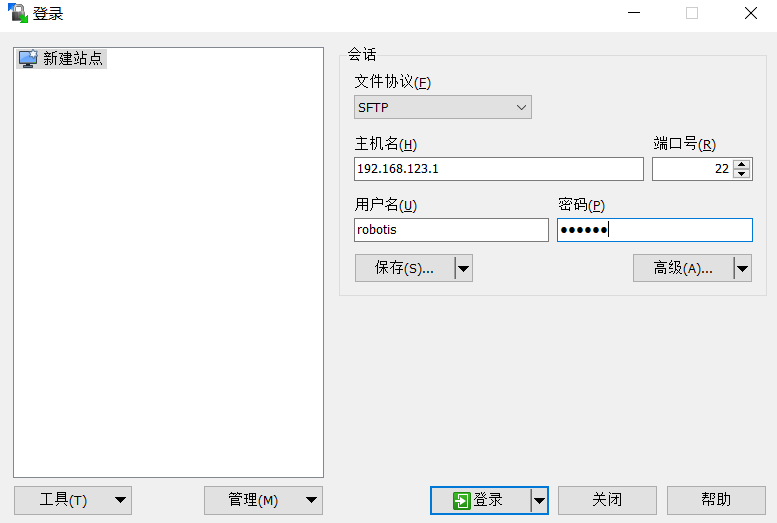
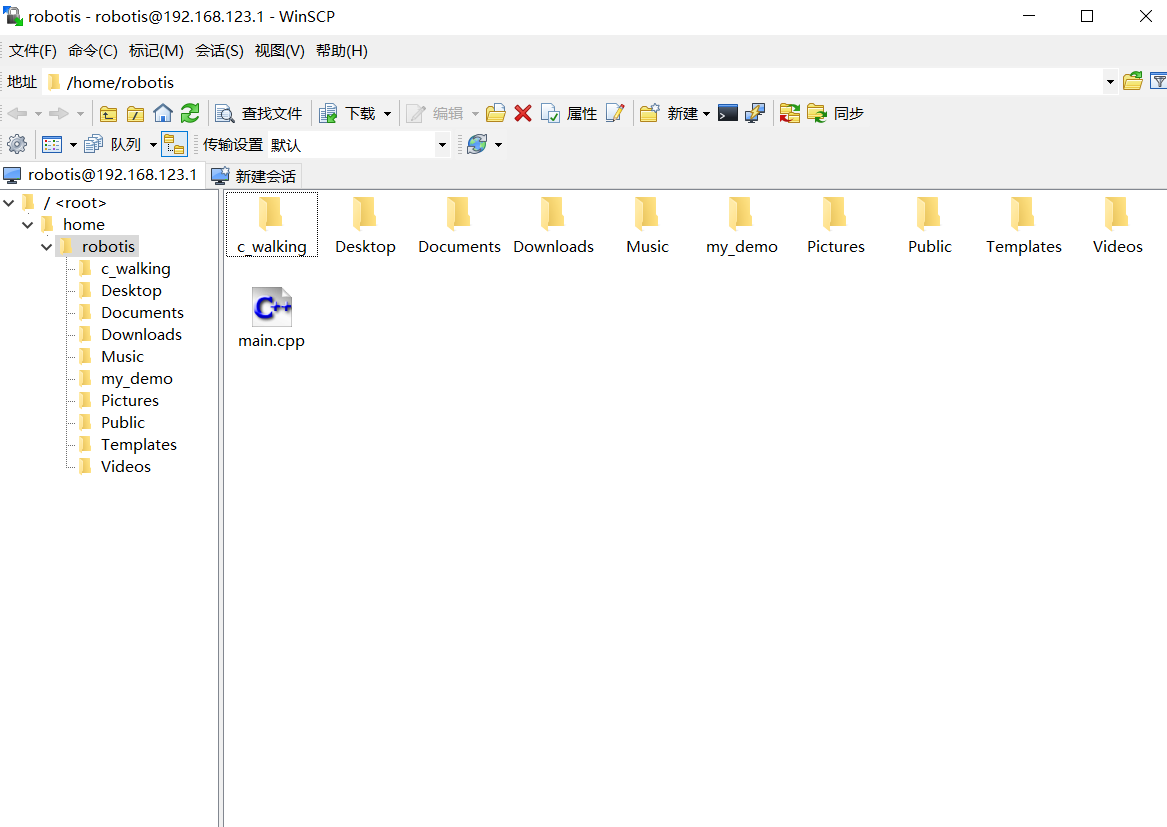
3.1.1 使用WinSCP进行设备连接 14
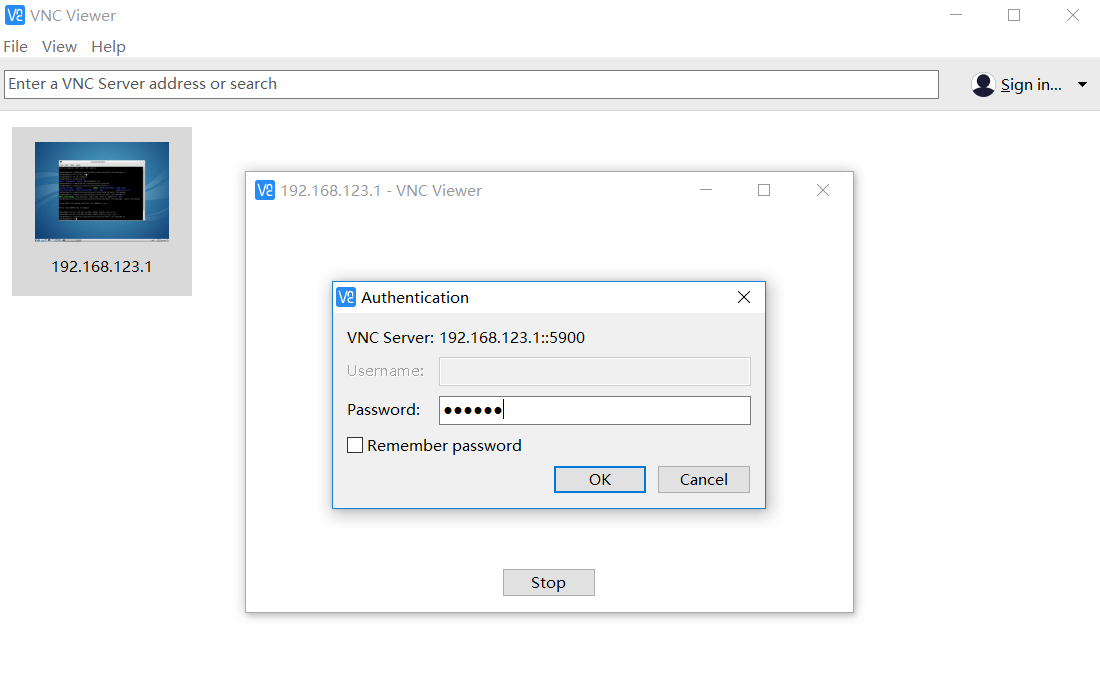
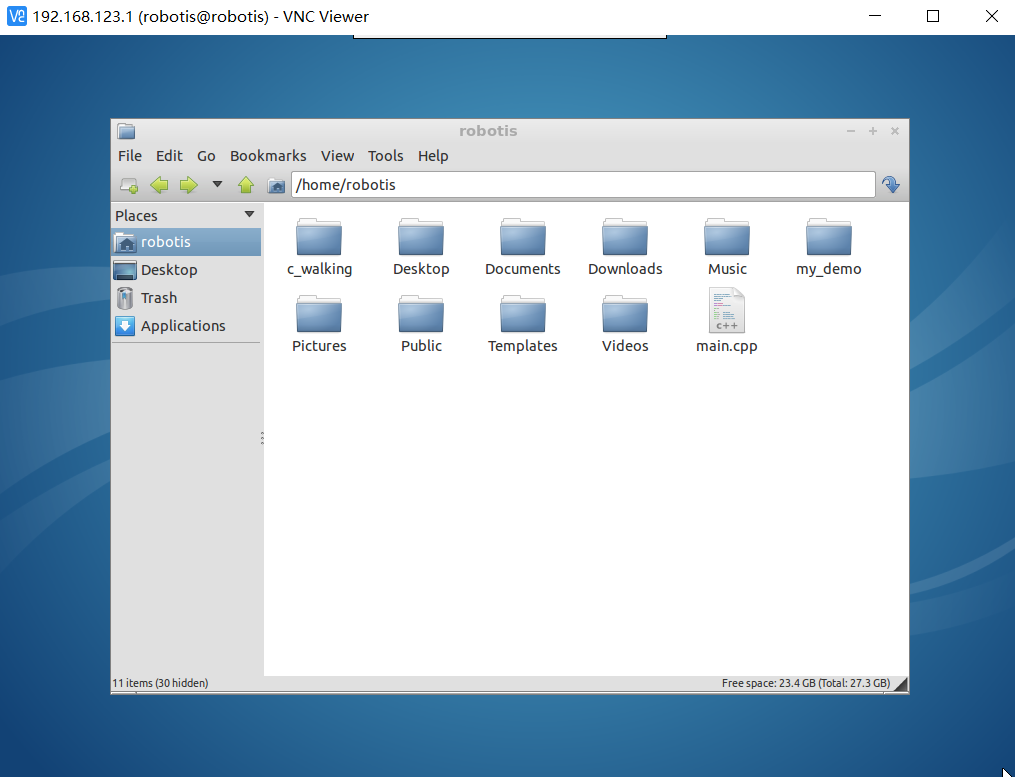
3.1.2 使用VNC Viewer进行设备连接 16
3.1.3 使用Putty进行设备连接 18
3.2 DARwin OP2机器人步态规划算法 19
3.3行走功能实现系统框图及原理 24
第4章 程序调试与测试 26
4.1 DARwin OP2程序调试与测试 26
第5章 实验结果及总结 30
参考文献 32
致谢 33
附录1 34
附录2 38
第1章 绪论
本文对智能机器人进行一个大概的讨论,智能机器人是研究者试图使之代替人类功能的,进行代替人类工作的一类高端机器,它的各部分结构尽量模仿了人类的器官,诸如四肢躯干大脑等 [[2]]。在很多地方智能机器人无法代替人类,但这依然不能打消现阶段人们对智能机器人的研究热情,毕竟如果能在智能机器人领域做出重大突破,对于人类对世界的探索以及了解在方法方式上也会有重大的革命意义,智能机器人可以在未来代替人类进行太空或者深海探索项目也不是不可预估,在智能性提高的技术革新之下,机器人势必将会能完成更多高精度与高难度的工作,想必这一天到来之时必将在业界掀起一股狂潮。
1.1 DARwin OP2机器人简介
DARwIn-OP2动态人形智能机器人是一款人工智能机器人。它的设计者不是一个单独的团队,它的主要设计团队有韩国的Robotis公司,宾夕法尼亚大学以及普渡大学,经过几方学者团队的通力合作与研究,最后设计出这样一款一款智能仿人机器人,DARwin OP2机器人的外表比较偏于可爱的一类,和工业机器人的笨重感不同,这一款机器人小巧,外形容易被大众喜爱,而且具备有一定水平的人工智能,这使它能够与人进行一些有趣的互动[[3]]。在国外,这一款DARwin OP2机器人甚至被用来进行中小学信息课程的教学使用。当然了,也有许多大学生通过这一款机器人进行他们的机器人研究平台。DARwIn-OP 动态人形智能机器人在学术领域以及工业领域内运用越来越广泛。它的研发团队声称,使用者可以随意对DARwIn-OP的软件和硬件进行自定义开发,它们都是开源的,你可以自己定制它身上的各个部分,选择需要的部件,然后自己组装,也可以前往官网进行开源代码的下载,为二次开发带来巨大的便利。DARwIn-OP2 动态人形智能机器人可以通过现成的指令块进行可视化编程,能够实现许多方面的开发工作。在各种领域用户都可以使用这款机器人进行探索开发,包括使用一些用户自己编写的一些程序,来达到用户想得到的效果。如果希望DARwIn-OP 动态人形智能机器人能够像人类一样自由行动,那么此背景下本设计研究类人机器人的行走编程设计也具有一定的现实意义。
1.2 国内外现状及发展趋势
DARwIn-OP 动态人形智能机器人外形精巧,带有ARM控制器,配有多种传感器,拥有强大的计算能力和分析能力,可自主运动与物体识别等功能,它的操作系统支持Linux和Windows,便于使用者的自主使用。因此,本次设计采用在Linux系统下进行C 代码的编写。
近些年,信息产业发展突飞猛进,与此同时,支撑信息产业发展的相关硬件产业以及电路技术也得到发展,人们不再局限于对集成电路以及微电子技术的探索,人工智能已经进入许多人的研究范畴之中,可以说从人工智能提出的那一天开始,研究人员就没有放弃过对这一项技术的追求,而人工智能机器人的研究无疑是非常有吸引力的,对机器人的研究也变为现在炙手可热的研究方向。但是在国内,对于仿人机器人的研究并不是很突出,一方面是起步相对于国外还是晚了不少,另一方面相关的技术也还处于探索阶段。直到上世纪80年代,我国才把机器人的相关研究列入了国家高技术研究发展计划之中。最开始国内的研究几乎都是跟在国外的研究结果后面,但是后来通过对其他国家的技术研究与学习,国内的机器人技术也得到了更迭,正在蓬勃发展。国内进行机器人技术研究工作的机构有不少,哈尔滨工业大学、国防科技大学、清华大学、上海交通大学、北京理工大学等是国内的个中好手。尤其是哈尔冰工业大学,从1985年开始,哈尔滨工业大学在机器人技术方面的工作非常突出,得到了国家的大力支持,他们也不负众望,已经顺利完成三个型号的研制工作,HIT-I型机器人 HIT-11和HIT-III型机器人。 1988年,哈尔滨工业大学研制出HIT-I型双足机器人,其采用平行四边形结构,具有10个自由度,体重为100kg,身高为1.2m。但是由于机型整体结构以及材料等问题,这一款机器人的重量比较大,关节的支撑成为它模仿人类步行的一个比较严重的问题,这一问题大大限制了它的行走能力。
说完国内,再看看国外的研究,机器人项目作为新兴的研究方向,其实在国外已经有许多国家获得了可喜的技术进步。日本,美国欧洲各国都对仿人机器人进行了不少的研究工作。其中技术较为领先的当属日本,早在上世纪60年代,早稻田大学的加藤一郎教授就对双足智能机器人进行了研究和制造的工作,在1971年,加藤实验室又研制出WAP-3型和WL-5型双足机器人。在1986年,加藤教授的实验室又推出了一款WL-12DR型双足步行机器人。该机器人能够通过躯体的运动对下肢的任意运动进行补偿,从而使自身在运动过程中保持平衡,取得了喜人的研究成果。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


