气动肌肉无模型自适应控制系统设计毕业论文
2020-04-13 11:10:00
摘 要
在人口老龄化问题日益严峻以及肢体残疾人士数目不断增多的今天,以康复机器人为代表的智能设备在康复医疗领域正发挥着越来越重要的作用。作为一种新型的气动元件,气动肌肉由于其功耗小,输出力大,柔顺性好,价格低廉,安全性高等优点而被广泛地运用在了康复机器人之中。然而,由于气动肌肉建模困难加之其本身具有参数时变性和非线性等特性,使得传统的控制方案难以对其进行精准的位置控制。如何控制气动肌肉使其收缩到某一特定位置长度从而达到准确控制康复机器人使其完成某一预期动作的目的,这是康复机器人领域一个值得研究的问题。
本次研究以气动肌肉为实验的控制对象,设计完成了一个无模型自适应控制系统对其进行控制。利用Matlab软件对气动肌肉进行建模,并对建立的黑盒模型进行无模型自适应控制算法的仿真。设计了基于Labview的气动肌肉控制系统,采用无模型自适应控制算法对单根气动肌肉进行控制。结果表示,不论是仿真阶段还是实际控制阶段,无模型自适应控制方案都可以对单根气动肌肉进行较为精准的位置控制。通过和传统的PID控制方式相对比,更加证明了该控制方案的准确性。
关键词:气动肌肉,无模型自适应控制,位置控制,康复机器人
Abstract
In today's increasingly grim population aging problem and the increasing number of people with physical disabilities, smart devices represented by rehabilitation robots are playing an increasingly important role in the field of rehabilitation medicine. As a new type of pneumatic component, the pneumatic artificial muscle has been widely used in rehabilitation robots due to its advantages of low power consumption, large output power, good flexibility, low cost, and high security. However, due to the difficulty of modeling the pneumatic artificial muscle and the characteristics of time-varying and nonlinear parameters, it is difficult for traditional control schemes to perform precise position control. How to control the pneumatic artificial muscle to shrink it to a certain position length so as to achieve the purpose of accurately controlling the rehabilitation robot to accomplish a desired action is a problem worthy of study in the rehabilitation robot field.
In this study, a model free adaptive control system is designed to control a pneumatic artificial muscle as an experimental control object. Matlab software is used to model the pneumatic artificial muscle, and the black box model is simulated by a model free adaptive control algorithm. A pneumatic artificial muscle control system based on Labview was designed and a model free adaptive control algorithm was used to control a single pneumatic artificial muscle. The results indicate that the model free adaptive control scheme can accurately control the position of a single pneumatic artificial muscle, regardless of the simulation stage or the actual control stage. Compared with the traditional method of PID , the accuracy of this control method is more verified.
Key words: Pneumatic artificial muscle, Model free adaptive control, Position control, Rehabilitation robot
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 研究目的及意义 1
1.2 国内外研究现状 1
1.3 本文主要研究内容 3
第2章 气动肌肉无模型自适应控制原理 4
2.1 气动肌肉结构及其工作原理 4
2.2 无模型自适应控制算法研究 4
2.2.1 无模型自适应控制原理 4
2.2.2 无模型自适应控制特性分析 8
2.2.3 其他形式下的无模型自适应控制 10
2.3 本章小结 12
第3章 气动肌肉无模型自适应控制系统实现 13
3.1 气动肌肉无模型自适应控制功能仿真 13
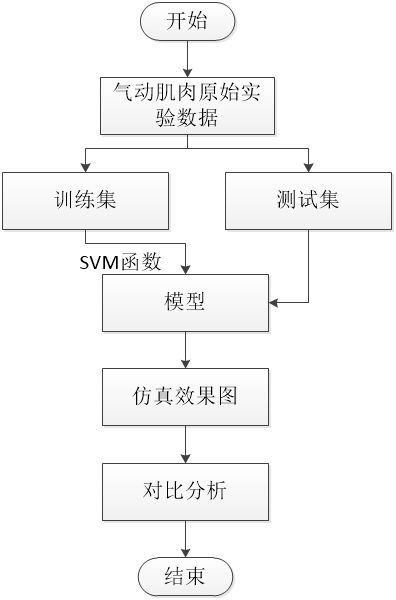
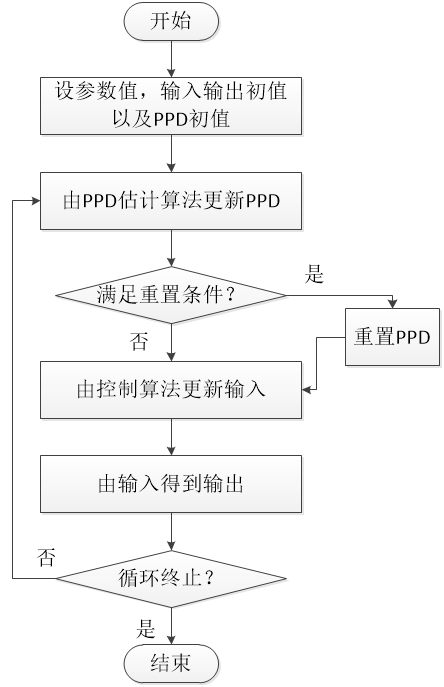
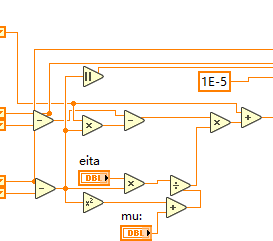
3.1.1 仿真流程 13
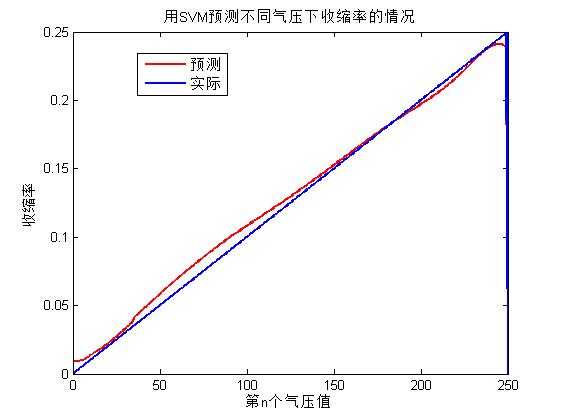
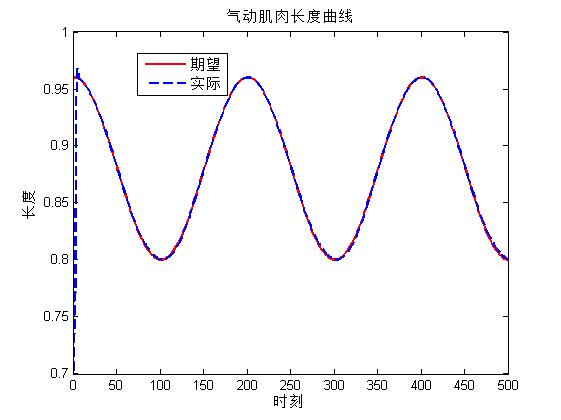
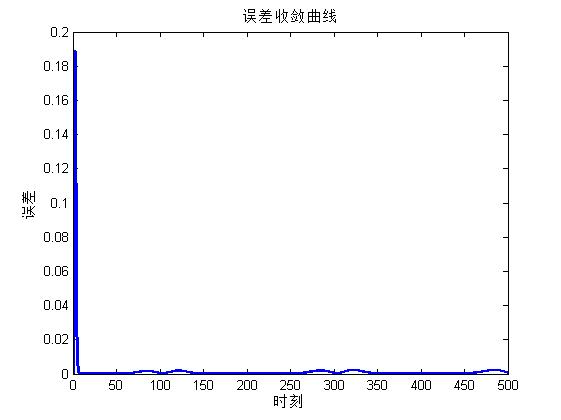
3.1.2 仿真结果 16
3.2 气动肌肉无模型自适应控制实测分析 19
3.2.1 平台设计 19
3.2.2 实测结果 23
3.3 本章小结 26
第4章 总结与展望 27
4.1 全文工作总结 27
4.2 下一步工作展望 27
参考文献 28
附录 30
致谢 35
第1章 绪论
1.1 研究目的及意义
伴随着自动化与机械化时代的到来,以气动肌肉(pneumatic artificial muscle, PAM)为首的各类气动元件也在不断发展并被人们广泛运用于各类康复机器人之中。气动肌肉结构简单,其内层是具有一定弹性性能的橡胶管,外层为倾斜编织的纤维编织层,两端有封装和固定装置。在外加气压的作用下,气动肌肉径向膨胀,轴向收缩从而产生收缩力驱动物体运动。然而,由于气动肌肉受到自身所存在的内部摩擦力,橡胶弹力以及端部非理想圆柱特性等的影响,加之气动肌肉部分参数不易获得,种种原因使得气动肌肉的精准模型很难得到建立。另外,由于气动肌肉具有参数时变性和非线性等特性,这也使得传统的控制方案往往不能达到令人满意的控制效果[1]。因此,寻找更加合适的气动肌肉建模方式以及气动肌肉控制方法成为了亟待解决的问题。
气动肌肉以其重量轻,输出力大,功耗小,柔顺性好,安全性高等特点而备受瞩目[2]。其具有诸多与生物肌肉相似的特点,从而在很多方面可以模仿生物肌肉进行某些动作甚至有可能在某些情况下代替生物肌肉。随着人们的深入研究,气动肌肉必将会有更加广泛的应用,这也为康复医疗和人工智能等领域的进一步发展提供了可能,因此对气动肌肉的控制研究具有很大的理论价值以及应用价值。
1.2 国内外研究现状
从上世纪50年代开始,人们便着手于气动肌肉控制方法的研究。但由于当时设备条件有限加之理论知识的局限性,使得气动肌肉的控制研究停滞不前控制效果不尽人意。后来,随着各种控制理论的不断发展,许多全新的控制方法也随之产生。
Hildebrandt A, Sawodny O, Neumann R等人采用内环PI压力控制结合外环PID位置控制的级联方式对气动肌肉驱动的机械手臂进行控制,并最终取到了较为理想的控制效果[3]。Dang Xuan Ba, Truong Quang Dinh, Kyoung Kwan Ahn等人针对气动人工肌肉系统提出了一种先进的位置跟踪方法,称为集成智能非线性控制器。总体控制方法能够快速保证系统的性能响应,高精度和鲁棒性。实时实验在不同的条件下进行,实验结果验证了该方法的有效性[4]。TU Diep Cong Thanh, Kyoung Kwan Ahn 等人针对非线性对象,提出了一种新的神经网络非线性PID控制器,该控制器适用于一类具有非线性不确定性的对象。实验在实际的气动肌肉机械手上进行,通过实验证明了所选方案的有效性,表明其具有优越的性能和抗干扰能力[5]。
国内对气动肌肉控制方法的研究相比而言起步较晚,但研究过程中同样取得了许多丰硕成果。王杨,张强,肖晓晖等人提出了一种基于鲁棒建模方法的级联控制策略。实验表明,在工作频率较低以及回旋角度较小的情况下,使用该策略可以很好的对单根气动肌肉驱动的非对称关节的位置进行跟踪控制[6]。黄剑,王永骥等人基于动态面控制的非线性干扰观测器提出了一种新的气动肌肉系统轨迹跟踪方案。所提出的新的控制方案综合了动态表面控制的优点,同时估计时变不确定性,以实现固有不确定性的补偿。仿真研究和实际实验结果证明了该方案的效果,表明在存在建模误差的情况下,该方案依然具有十分良好的控制效果[7]。王斌锐,沈国阳等人分别采用PID控制,滑模控制和基于干扰观测器的滑模控制进行了气动肌肉肘关节位置跟踪实验,实验结果表明使用基于干扰观测器的滑模控制方式其位置控制精度和鲁棒性均优于前两种控制方式,即PID控制和滑模控制[8]。
如今,虽然气动肌肉的控制方法多种多样,但想要达到完全精准的控制仍旧是一件十分困难的事情,另外如何让气动肌肉快速响应以满足人们的预期,这也需要我们不断探索。在气动肌肉控制方法的研究过程中,还有许多事情等待着我们去完成。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


