码垛机械手控制系统仿真毕业论文
2020-04-13 11:44:10
摘 要
本文主要以MATLAB为平台研究码垛机械手,研究角度包括:码垛机械手的任务空间分析,运动学分析,性能指标分析。并使用SolidWorks软件绘制各个零件,再装配成完整的码垛机械手,完成建模,并与MATLAB软件中进行联合仿真。研究取得如下结果:
建立了码垛机械手的D-H数学模型,通过一系列的矩阵运算,体会到了MATLAB在矩阵运算中的巨大便利,并得到了最终的D-H矩阵,从而从中提取参考点的坐标方程。并在MATLAB中对方程进行编程,得到码垛机械手的工作空间,再改变参数,探究改变的参数对工作空间的影响,即运动学的分析。利用速度雅可比矩阵,求解其条件数,对机械手的速度性能进行分析,并利用MATLAB编写程序输出对应的3维视图和性能评价图谱。再改变改变大臂小臂的尺寸或旋转的角度,探究改变的尺寸或角度对机械手性能的影响,得到结论。
使用SolidWorks软件画出码垛机械手各个零部件,再统一进行装配。联合使用MATLAB的Sim Mechanics仿真功能进行测试。通过分析示波器模块中输出的波形,利用Simulink的可视化功能,我们能看到机械手手抓的运动轨迹,并得到码垛机械手控制系统仿真顺利运行的结论。
关键词:码垛机器人;工作空间;雅可比矩阵;MATLAB仿真
Abstract
This thesis mainly is studied palletizing robot with MATLAB as the platform. The research direction includes: palletizing robot's task space analysis, kinematics analysis and performance index analysis. Besides, SolidWorks software is used to draw each part. All parts are assembled into a complete palletizing robot to complete the model. And this model is emulated with MATLAB software. Results are as follows :
palletizing robot D-H mathematical model is established. Through a series of matrix operation, I realize the enormous convenience by MTALAB. Finally, The final D-H matrix is obtained . Through the final D-H matrix, I extract the reference point of the coordinates equation.
In addition, the equation is programmed in MATLAB to obtain the working space of the palletizing robot, and then the parameters are changed to explore the influence of the changed parameters on the working space, namely, the analysis of kinematics. By using the speed Jacobian matrix, the condition number are solved, the speed performance of the manipulator is analyzed, and the corresponding 3d view and performance evaluation map are outputted by programming MATLAB.
Then I change the size or rotation angle of the arm, and explores the influence of the changed size or angle on the performance .
Using SolidWorks software, each part of the robot is drawn. After all parts are assembled.
We use MATLAB to test the Sim Mechanics simulation function. Through the analysis of the oscilloscope module output waveform, and the visual function of Simulink, we can see the motion trajectory of manipulator hand grasp, and get the conclusion of palletizing robot control system simulation run smoothly.
Key words: stacking robot; Working space; Jacobian matrix; The MATLAB simulatio
目录
摘 要 I
Abstract II
第1章 绪论 1
1.1引言 1
1.2码垛机械手的分类与特点 1
1.3国内外码垛机械手的发展 2
1.3.1国外码垛机械手近期的发展 2
1.3.2国内码垛机械手的发展 5
1.4仿真技术的仿真与前景 6
1.5主要研究内容 7
第2章 码垛机械手的整体设计与运动学分析 8
2.1引言 8
2.2码垛机械手的整体设计 8
2.3码垛机械手的任务空间 9
2.4码垛机械手的运动学分析 10
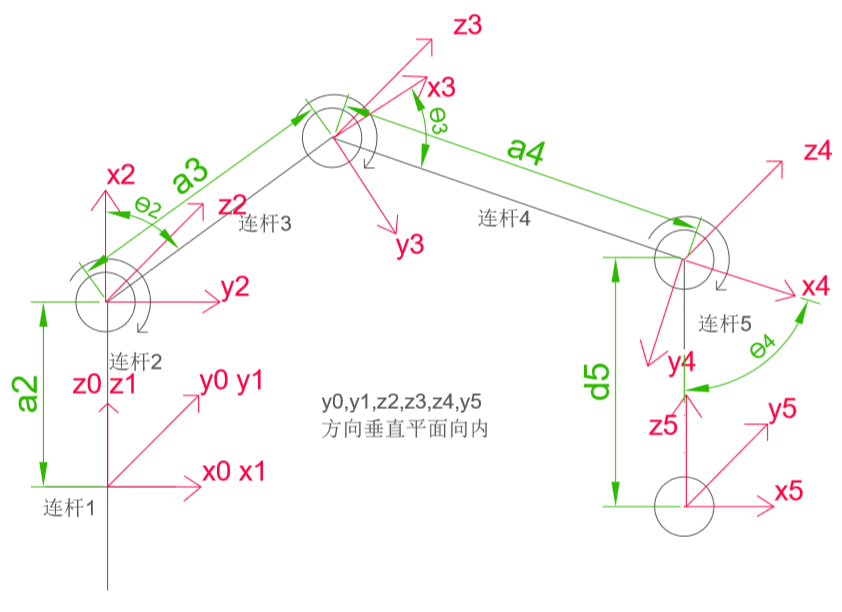
2.4.1利用D-H模型建模以及标定 10
2.4.2码垛机械手的运动学正解 12
2.4.3码垛机械手的运动学逆解 15
2.5机械手工作空间分析 17
2.6本章小结 19
第3章 码垛机械手的速度性能分析 20
3.1引言 20
3.2运动学性能评价指标 20
3.2.1求解雅可比矩阵 20
3.2.2码垛机械手速度及加速度性能评价指标 21
3.2.3速度性能评价指标分析 23
3.2.4速度全域性能评价指标分析 24
3.3本章小结 25
第4章 码垛机械手三维建模与MATLAB仿真 26
4.1引言 26
4.2建立三维模型 26
4.3仿真平台MATLAB 27
4.4搭建仿真环境 28
4.5搭建模型并仿真 29
4.6本章小结 32
结论与展望 33
参考文献 34
附录A机械手的工作空间程序 35
附录B得出D-H矩阵的程序 36
附录C雅可比矩阵条件数的程序 37
附录D速度性能指标分析程序 38
致谢 40
第1章 绪论
1.1引言
近年来,国际制造业自动化成为一种趋势,我国的工业制造业也乘着这东风,不断更新生产设备,因此对自动化软硬件的需求不断增加,其中,工业机器人的市场也在不断膨胀。目前工业机器人也适应着层出不穷的用途,众多机器人厂商与研究所也是推陈出新,使机器人越来越强强大。工业机器人能够取代单调,一再重复的作业,更是能够在不适合工人工作的环境下正常工作。
在工业机器人中,码垛作业在物流方面和自动化领域应用越来越广泛,它是以集成化为单元,将袋装、箱体等对象按照一定的规模和次序等要求放在所需要规定的地方,最后完成货物的抓取、转运、存储、码垛等物流活动[1]。
1.2码垛机械手的分类与特点
机械手的种类,按不同的标准可以有多种分类方法。按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手;按驱动方式可分为液压式、气动式、电动式、机械式机械手;按机械手的结构类型可分为直角坐标结构、圆柱坐标结构、球坐标结构、关节型结构0。
从结构角度看:
直角坐标结构的机械手是以两两相交成直角的直线即XYZ轴上的平移来实现的,因为是直线方向的位移,容易实现闭环控制,因此该类机械手能达到十分高的精度要求。如图1.1(a)
圆柱坐标结构机械手的动作是用一条臂的旋转回及另一条臂的伸缩和上下平移来实现的。由于伸缩臂的上下平移受到支撑臂的尺寸和轨道的限制,不能抓取低于轨道的物品。如图1.1(b)
球坐标机械手的动作与圆柱不同,球坐标的小臂和大臂均可以旋转,加之小臂也能完成伸缩变换。此类机械手的结构并不复杂,成本不高,动作却灵活,占地面积小,但精度不高。同样被工厂用作搬运。它的工作空间是类似空心的球形。如图1.1(c)
关节型结构机械手的动作是由三个关节的旋转实现的,能达到的地方多,动作灵活,适应多种工种,能抓到靠近底座的物体,并能跨过阻挡去抓到货物。如图1.1(d)
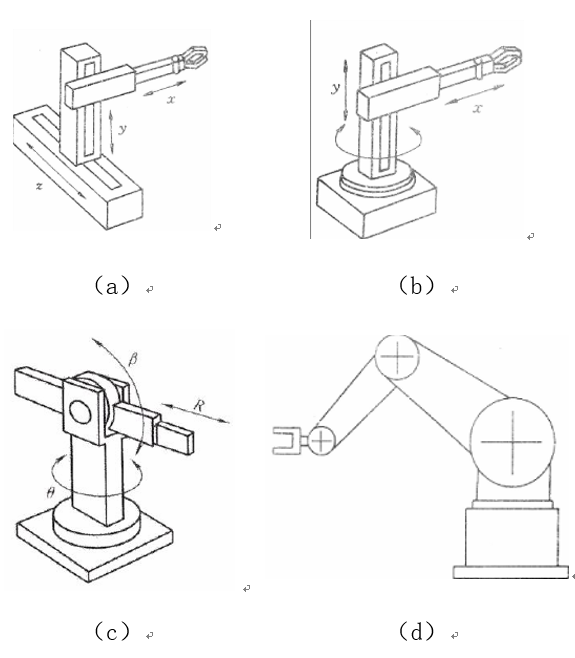
图1.1四种结构类型的机械手
利用码垛机械手可以做到:节流人工,保持几乎不变的产量。利用码垛机械手可以延续全天工作,而且不消担忧没人工作或员工告假。单人可看护多台机器,无需支付更多的费用。人会劳顿,但是码垛机械手能保持不变的速率工作。现如今,当搬运工的人少,劳务费用增加,而普通工人技术不高,态度鲜有达标,容易产生各种各样的问题,影响企业生产。
使用码垛机械手可以使生产变得倍加安全。使用机械手不容易产生员工的意外伤害,比如:人接触产品的机会少了,就避免了会因为产品生产出的余温而造成员工烫伤;减少了员工的搬运,也继而避免了其中的安全隐患,如砸伤、磕碰等。
1.3国内外码垛机械手的发展
1.3.1国外码垛机械手近期的发展
1962年的时候,美国以纯机械手为基础,为其增加伺服系统和控制与反馈系统后,研制出了世界上第一架工业机器人。
在芝加哥PROMAT / AUTOMATE 2013展览上,各个机器人公司展出了各种新型机器人。机器人昂贵,难以编程,固定位置的搬运重物的机械手时代已经结束。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:



课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


