Mecanum轮式工业AGV室内导航与自动驾驶系统设计毕业论文
2020-04-13 11:44:40
摘 要
全向无人导引自动运输车(AGV)是一种在平面内可以朝任意方向移动,并以任意半径旋转的小车,适合在空间狭窄有限的环境下作业,在未来的工业生产中,对提升生产效率会起到很大的帮助,是目前国内外研究的热点。本文研究的是一台基于Mecanum轮的全向AGV,搭载了目前先进的Sick公司的激光雷达NAV350定位系统,目标是了解AGV整体构架,硬件性能,以及各模块的工作原理,并对其进行运动控制,完成定位。经过实际调试后,实现了AGV定位和自动导航的功能,并且通过数据分析得出,此定位系统的精确度较高。
在现代化制造业领域,全向AGV作为移动机器人的一种特殊应用,是现代化、智能化柔性制造的重要组成部分,它的广泛应用将会给各行各业带来巨大的进步。
关键词:全向AGV;Mecanum轮;运动控制;激光定位
Abstract
The omnidirectional Automated Guided Vehicle (AGV) is a kind of vehicle that can move in any direction in the plane and rotate in any arbitrary radius. It is suitable for working in a limited space. In the future, in the industrial production, it will play a big role in increasing production. This is currently a hot topic at home and abroad. This article studies an omnidirectional AGV based on the Mecanum wheel, which equipped whit the current advanced Sick laser radar NAV350 position system. The goal is to understand the overall architecture of the AGV, hardware performance, the working principle of each module and its movement control and to complete positioning. After actual debugging, the function of AGV positioning and automatic navigation is realized. And through data analysis, the accuracy of this positioning system is high.
In the modern manufacturing field, omnidirectional AGV is an important part of modern and intelligent manufacturing as a special application of mobile robots. Its wide application will bring tremendous progress to all works of life.
Key Words: Omnidirectional AGV;Mecanum Wheel;Movement Control;Laser Positioning
目 录
第1章 绪论 1
1.1 研究的目的及意义 1
1.2 AGV的国内外研究现状 1
1.3 AGV导引方式 3
1.4 本课题的主要研究内容 3
第2章 AGV整体架构及原理 4
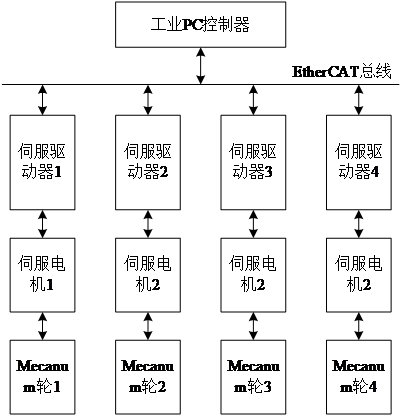
2.1 AGV整体架构 4
2.2 AGV控制系统 5
2.2.1 工业PC控制器 6
2.2.2 伺服驱动系统 6
2.3 Mecanum轮简介 7
2.4 激光雷达及定位原理 8
2.4.1 激光雷达简介 8
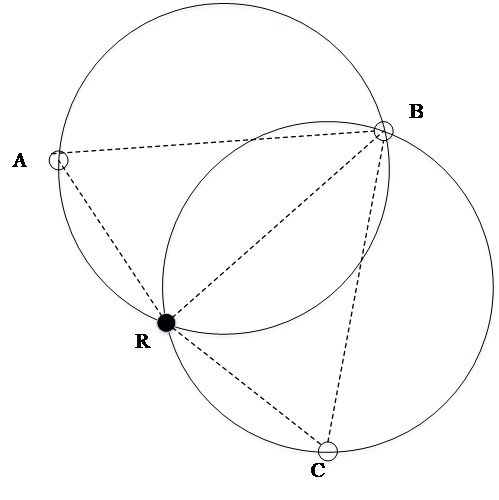
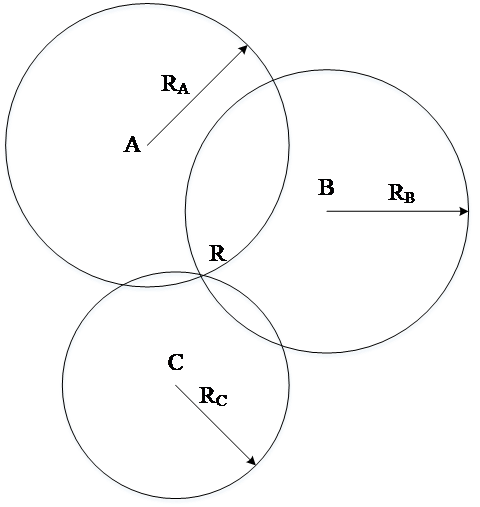
2.4.2 激光定位原理 9
2.5 安全激光扫描器 12
第3章 AGV整体测试 14
3.1 AGV运动学分析和控制代码调试 14
3.1.1 AGV运动学分析 14
3.1.2 AGV运动控制代码分析 16
3.2 激光雷达的建图、定位和导航 18
3.2.1 手动建图、定位和导航 18
3.2.2 自动建图、定位和导航 21
3.3 AGV运动测试 21
第4章 总结和展望 23
4.1 论文工作总结 23
4.2 研究工作展望 23
参考文献 25
致 谢 26
第1章 绪论
1.1 研究的目的及意义
在如今的科技领域中,计算机、传感器、人工智能、控制工程等理论技术不断发展和完善,在有关机器人的研发和应用领域实现了巨大的突破[1],其中移动机器人是一个非常重要的研究方向。由于实际需要,移动机器人的应用范围越来越广,包括工业、仓储业、制造业、物流行业、危险场所和特种行业等领域。
随着制造业自动化水平的不断提升,实际生产中对运输方式、运输精度以及运行效率等的要求越来越高[2],根据实际经验来看,提高生产效率的关键就在于提升运输效率,因此在运输中起到决定性作用的运输车就尤为重要,其中自动导引运输车的研发被提上了日程。
AGV(Automated Guided Vehicle),即无人导引自动运输车,是轮式移动机器人的一种特殊应用,是指配备了电磁、光学等自动导航设备,并且可以按照规划路线行驶,具有各种移动运输功能以及安全保护措施的运输车[3]。AGV在工业应用中不需要人工驾驶,其动力源是可充电的蓄电池。一般使用PC来对其进行路径规划和行为控制,此种是自由路径AGV;也可以在地面铺设电磁轨道使AGV遵循其所给信息进行动作,这种称为固定路径AGV。
在工厂的生产过程中,仅有5%的时间是花费在制造和加工上,而其他时间都是消耗在运输、装卸、存储等部分上,而这些部分花费的费用占到了生产成本的40%[4]。因此,目前世界各国的工业领域都开始在改造物流结构,降低物流成本等方面采取措施,以在行业竞争中取得领先地位。
为了满足生产的需要,物流正朝着现代化和智能化的方向前进,我们研究的AGV具有先进性高、灵活性好、可靠性高、柔性程度高、可实现生产和搬运功能的集成化和自动化等优点,在许多行业领域都有广泛的应用[5]。
Mecanum轮式AGV是一种采用Mecanum轮制作的全方位移动运输车,在二维空间中,可以同时或独立地在前后、左右、自旋这三个自由度上运动,特别是在空间受限的情况下,相比较传统的移动机制更加具有优势。基于Mecanum轮的AGV具有机械结构简单、运动控制灵活、通过性好等优点,近年来在各领域中有了更加广泛的应用,并且具有广阔的发展前景[6]。
1.2 AGV的国内外研究现状
AGV已经经历了六十多年的发展。1953年,制造出了第一辆AGV,它是由一台牵引式拖拉机改装而成的,通过在空中布置的导线进行路径导引,用于在仓库中运送货物[4]。上世纪五十年代末到六十年代初时,已经研发出了多种牵引式AGV,用于在仓库和工厂里运输生产物料。
在上世纪七十年代,随着技术的进步,AGV的导引方式被开发成以埋在地下的导线产生的电磁频率为导引,并通过一个控制器打开或关闭导线中的频率,使AGV能遵循规划的路径行驶。到了20世纪80年代末期,AGV的导引方式已经逐渐演变为无线导引,包括利用激光或惯性来进行导引,这样导引路径的灵活性和准确性有了大幅度的提高,而且修改路径也更加方便。各种各样导引方式的研发,使AGV的运输效率有了极大的提升。
自上世纪八十年代以来,在生产物流系统中,AGV系统已经占据了十分重要的地位,并且朝着产业化发展,成为了现代化企业自动化设备的不可或缺的一部分。在欧美的一些发达国家,AGV的发展尤为迅速,应用范围也最广;在日本和韩国也得到了大力发展,尤其是在日本,AGV的产品规格、种类、技术水平及自动化程度等方面十分丰富,整个生产线已经具备了流水线生产的水平。在我国当今物流业发展迅猛,AGV的应用领域也在不断扩大,但是想要研发出满足各行各业需求的AGV仍然需要一段时间的努力。
从AGV的关键技术之一——导引技术的目前发展情况来看,电磁感应导引已经被广泛应用;激光导引是目前的主流技术,此课题研究的AGV就是基于激光导引;视觉导引还在研发中,是未来一段时间的研究热点,可用于室内和室外的导航;惯性导引、超声波导引和磁钉-陀螺导引正在受到工程师的广泛关注。
通过对现在AGV技术的了解,AGV的发展模式在国内外主要分为两种:第一种是欧美国家主要研制的全自动AGV技术,这类技术的目标是实现AGV自动化,几乎不需要人为操作,路径规划和生产流程十分复杂,几乎可以在任何场合应用。此类AGV功能多样,技术先进,同时采用模块化设计从而降低了成本,提高了批量生产的标准;具有多种驱动模式、导引方式、移载机构,载重量可从50kg到60000kg[7]。但是由于技术和功能原因,这种AGV的价格十分昂贵。第二种是日本制造的简易型AGV技术,只能称其为AGC(Automated Guided Cart),此技术简单实用,成本极低,能使用户在短时间内获利。AGC只能用来运输,需要进行人机协作才能完成自动装卸,导引方式主要采用最简单的磁带导引。该技术门槛较低,许多国内企业已经可以生产此产品。
目前,中国的AGV发展技术水平仅仅相当于国外上世纪80年代初期的水平。但是,随着现今物流行业的迅猛发展,AGV的应用领域也分布得愈加广阔,涵盖了烟草行业、物流业、汽车工业、飞机制造业、家用电器业等。目前AGV主要用于室内,随着行业的需要和技术的进步,室外AGV技术也会得到发展并广泛应用。我国的AGV拥有一个潜在的十分广阔的市场。
计算机、控制工程等学科的迅速发展使得AGV的研究技术日趋成熟,目前,AGV正朝着自动化、智能化、高柔性化的方向发展,来满足应用领域的需求,从而扩大其应用领域。由此可见,未来AGV在军事武器的运输,危险地带的勘测和救援,航空航天设备的装配和运输等特殊环境的应用也将成为研究的热点。
1.3 AGV导引方式
研究自动导引运输车的核心技术之一就是AGV的导引方式,这也是AGV发展成为自动化智能设备的关键技术之一。
将导引方式按照传感器类型分类,可以分为有线导引和无线导引。有线导引可以分为地磁导引、光学导引、电磁导引等;无线导引可以分为超声波导引、激光导引、视觉导引等,各种导引方式各有利弊[2]。郑炳坤[8]等提出一种基于CAN总线、易于扩展的磁导航AGV控制系统,这种导引方式路径设置比较简便,但是磁带很容易受到损坏和污染,需要定期更新和重新涂覆。童峰[9]等研发了一种用于AGV的超声波导引系统,这种导引方式的优点是在特定的环境下柔性较好,缺点是需要大面积的反射面,难以应用于空间有限的中、小型生产车间中进行生产。陈顺平[10]等提出了使用激光导引的方式来控制AGV,其优点是定位精确度高,改变路径容易,缺点是AGV需要照明条件好的作业环境,仅适用于室内。国外工程师还提出了一种视觉导引的方式,使用相机拍摄周围环境的图像,并还原成立体图像,从而来确定AGV的位姿,这种导引方式的优点是可以灵活地路径设置,可用于室内和室外,受环境影响小,但由于技术上的局限性,这种方法尚未投入应用,但是未来视觉导引将会是研究的热点。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:




课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


