无人艇岸站监控系统设计毕业论文
2020-04-13 13:05:08
摘 要
无人艇是一种可以部署于河流、湖泊、海洋等水域的无人自动化舰艇设备,其在民事如农业、渔业、环保、安防和军事如无人侦察探测等领域具有十分重要的应用。由于无人艇的部署环境复杂、运行环境相对恶劣、信息需要实时传递,因此需要一款高稳定性、实时性无人艇远程监视与控制系统。
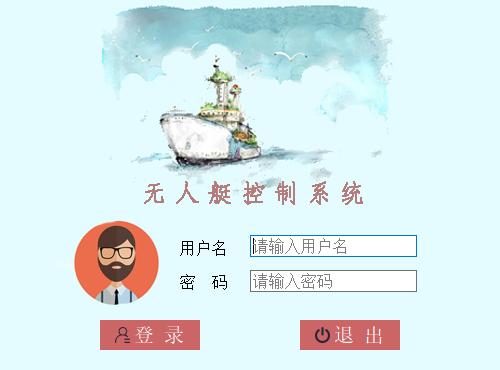
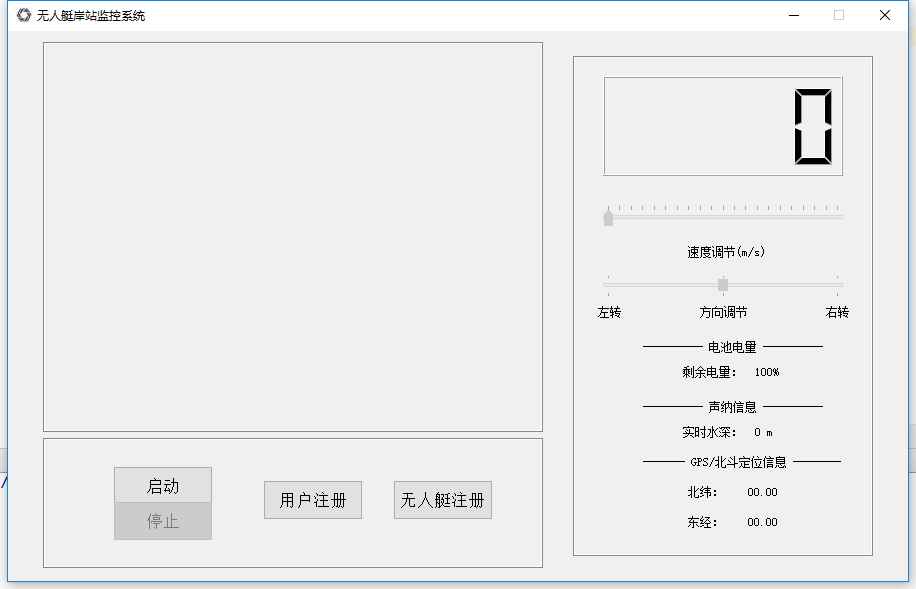
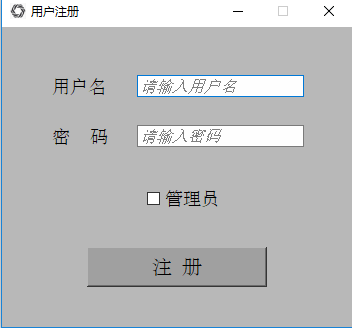
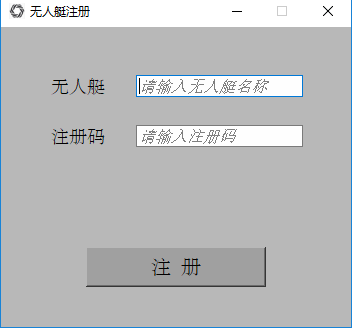
该设计从此需求出发,设计了一款集无人艇客户端管理、远程控制中心服务端管理、双端实时通讯、无人艇数据库管理为一体的高稳定性、实时性、多功能的无人艇岸站监控系统。具体的,使用Python、QT、opencv等实现客户端与服务端的界面设计,包括注册、登陆、无人艇状态实时显示、指令发出等功能;使用socket实现客户端与服务端的数据交换;使用MySQL实现无人艇数据库的管理,系统各项数据将被保存用于存档和后续数据分析处理。
关键词:无人艇;监视与控制系统;数据库管理
Abstract
USV is an unmanned automated naval vessel that can be deployed in rivers, lakes, oceans, and other waters. It has very important applications in fields such as agriculture, fishery, environmental protection, security, and military surveillance such as unmanned reconnaissance. Due to the complex deployment environment of USV, relatively poor operating environment, and the need for real-time information transmission, a high-stability, real-time remote monitoring and control system for USV is required.
Starting from this demand, the design has designed a high-stability, real-time, multi-functional unmanned set of unmanned client management, remote control center server management, dual-end real-time communication, and unmanned database management boat shore station monitoring system. Specifically, using Python, QT, opencv, etc. to achieve the interface design of the client and server, including registration, login, real-time display of USV status, command issuance and other functions; using socket to achieve data exchange between the client and server; using MySQL to achieve USV database management. Data of overall system will be saved for archiving and subsequent data analysis and processing.
Keywords: USV;Monitoring and Control System;Database management
目录
第1章 绪论 1
1.1 研究背景与意义 1
1.2 国内外发展现状 2
1.2.1 国外发展现状 2
1.2.2 国内发展现状 3
1.3 主要研究内容 3
第2章 监控与数据处理系统总体构架 5
2.1 系统总体构架 5
2.2 系统运行流程 6
2.3 系统构建语言介绍 6
第3章 客户端与服务端设计 7
3.1 技术基础 7
3.1.1 Qt 7
3.1.2 OpenCV 7
3.2 控制中心服务端设计 8
3.2.1 权限管理 8
3.2.2 无人艇控制与监视 8
3.2.3 控制中心服务端界面 9
3.3 无人艇客户端设计 13
3.3.1 无人艇账号管理 13
3.3.2 信息采集与接收功能集成 13
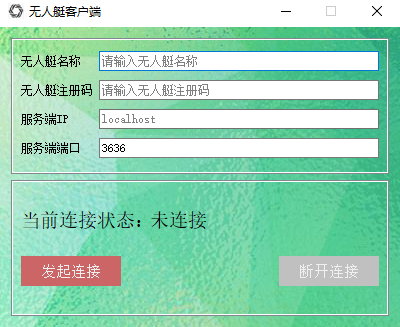
3.3.3 无人艇客户端界面 14
第4章 网络数据传输系统设计 16
4.1 技术基础-Socket 16
4.2 无人艇岸站监控网络数据传输设计 17
第5章 数据库系统设计 20
5.1 技术基础-MySQL 20
5.2 无人艇数据库设计 20
总结与展望 23
致谢 24
参考文献 25
第1章 绪论
1.1 研究背景与意义
无人艇,全称为无人水面艇(USV),是一种没有人员在艇操控的水域自主运行设备。通过搭载不同的具体任务需求的设备,可以完成多项远程任务。由于其体积小、安全性高,可以代替人类完成各项危险任务。同时,无人艇可以在任务可完成性与设备成本方面做出一个比较合理的折衷,比如在海洋学方面,无人艇比漂浮的气象浮标更有作用,但是比同等的气象船和研究船成本低很多。无人艇技术在二战时期诞生,并且在美苏冷战时期得到大力发展,由于美苏军备竞赛,无人艇当时主要用于军事应用,随着时代的推进,这一技术逐渐向民用发展。目前,有许多的无人艇被使用在军事、民事等方面。
在军事方面,由于信息化、自动化等技术在该领域占据越来越重要的作用,无人艇相关技术的一系列无人军事装备开始在战场上发挥日益重要的作用。因为无人艇有占据空间非常小、隐藏性比较高和灵活性比较高的属性,无人艇军事技术又得到了各国的大力发展。开展这方面研究的主要有美国、俄罗斯、英国、德国、以色列等国家,据统计,全球有70%的无人艇技术用于军事方向的装备。在这个大背景下,我国也急需大力发展无人艇军事技术,无人艇技术将成为我国信息探测、包围海洋领土的中间力量。
在民事方面,有越来越多的军事技术被转化到这方面。比如在航运探测方面,无人艇具有十分重要的作用。在我国的运输经济领域内,内河航运是一个比较关键和重要的方面,而各种航道的探测是保障内河航运安全、提升效率的基础,但是由于我国航道复杂、水流复杂,相关部门往往要花费大量的财力、人力和时间来获取这些数据,随着无人艇技术应用到此领域,可以比较方面的采集到风向、风速、浪高、流向等数据,大大减少了获取航道数据的成本。另外在环保方面,无人艇技术的使用,可以实现对某些复杂流域地区的环境数据采集。此外,在渔业方面,无人艇技术的使用,大大提高了自动化、现代化渔业技术的进展。大力发展无人艇民用技术,将给我国多个领域带来极高的经济发展效益。
而发展无人艇的一个重要技术保障就是无人艇实时监视与控制系统。在很多实际应用场景中,无人艇需要将获取的数据实时传输回控制中心,包括实时视频画面和任务所需求的相关数据,同时还需要将无人艇自身的相关状态数据返回,包括航向、航速、位置坐标信息等。另外,控制中心需要对无人艇发出相关指令,用于指挥无人艇完成相关任务,或者在某些复杂情况下对无人艇进行远程控制,此外,无人艇所获取的数据需要存储于数据库中,用于后续数据处理分析。这些任务的完成都需要该系统的保障。甚至在某些无人艇中,监视与控制系统是其核心技术,比如视频巡逻无人艇,据市场统计,2019年仅视频巡逻无人艇的市场容量将达到600亿人民币。因此,发展一款高稳定性、实时性、多功能的无人艇监视、控制与数据处理系统是非常有必要的。
1.2 国内外发展现状
1.2.1 国外发展现状
目前,无人艇技术被很多个国家视为一项非常重要的研究方向,已经进行了大量的研究。国外地区主要以美国和以色列为代表。
美国方面,由于美国十分重视海军的发展,无人艇技术也成为其重要发展对象[1]。从二战时期开始,美军就开始使用无人艇技术用于作战[2],当时美军在无人艇上架设自动化武器,对敌对军事目标实现无人快速打击,另外还有将无人艇技术用于水面扫雷[3]。近些年来,美军无人艇技术又得到了较大的发展,包括可以实现自防御的‘Roboski’无人艇、装备有高精密传感器的沿海秘密作战无人艇等。根据美国公开数据,美军现代化无人艇集成多种传感器,包括但不限于激光雷达、高清摄像机、声纳系统、水深仪等,并且可以完成多项军事任务,包括沿海安全、信息探测、扫雷等等,同时新能源技术也被应用,包括风能、太阳能等,以实现高续航的目标。图1展示了美国的一款代表性无人艇SSC San Diego。

图 1 SSC San Diego
以色列方面最有代表的USV是‘PROTECTOR’系列,该无人艇具有较强的自动作战能力,可以自动化完成某些重要的军事任务,大大减少了军事战争中的人员伤亡。此外,以色列最新无人艇可实现自动物体识别与跟踪、智能巡逻等任务,具有较强的智能性。图2为以色列‘PROTECTOR’系列无人艇。

图 2 PROTECTOR
1.2.2 国内发展现状
虽然国内无人艇技术开始发展的时间比较晚,但是最近一段时间也有了不小的发展。目前有较多高校和科研院所展开了相关研究,主要的研究机构有大连海事大学、中国航天科工集团、华中科技大学、哈尔滨工程大学等。国内发展前期,很多的无人艇用于拖船或者靶船[4],军事方面,早在2006年中国航天科技集团已经推出了‘XG-2’无人艇概念机,该无人艇除了配备有基础的传感器以外,还可以搭配轻型武器以完成某些军事任务。民用方面,国内又推出了用于实际工程的无人艇‘天象一号’,该艇已经在海洋探测等方面发挥了比较大的实际作用。
最近几年,随着我国在无人艇方面的大量科研投入,各种无人艇新技术被提出和引用,如多无人艇系统技术[5]、高速无人艇技术[6]、波浪动力艇技术[7]、无人艇图像采集技术[8]等。另外在军事方面,也有大量新技术被提出与应用,如无人艇军事作战平台的设计[9]、反水雷无人艇技术[10]等。在控制系统方面,有传统改进型控制算法[11]、基于模糊PID算法的路径规划[12]和抗干扰路径规划[13]等技术。
1.3 主要研究内容
本项课题主要设计了一款集无人艇客户端管理、控制中心服务端管理、信息网络传输、数据库管理于一体的无人艇监控与数据处理软件系统。包括软件界面设计、数据传输系统设计、数据库系统设计等内容,使用python、opencv、QT、MySQL、socket等语言和工具混合编程实现整个系统的搭建。文章的主要内容结构为:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:


课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


