高精度三轴运动平台设计及控制(10kg负载)毕业论文
2020-04-15 17:46:39
摘 要
本文首先对课题的设计和控制发展现状进行介绍,通过对XYZ三轴的滚珠丝杠滚珠丝杠副完成高精度三轴运动平台的机械设计,利用Solidworks三维位软件完成建模。其次完成对控制部件步进电机、直线光栅、直线滚动导轨选型计算,以及运用PID控制算法设计控制器。通过对光电编码器、I/O接口、步进电机的控制和键盘与显示器等的电路设计,同时编写了控制的部分程序,来完成控制系统方案。在设计、控制方案、程序的编写有不足之处,需要进一步完善。
关键词:滚珠丝杠 步进电机 光栅尺 滚动导轨 单片机
Design and Control of High Precision Three-Axis Motion Platform(10kg)
Abstract
Firstly of all, the topic introduces the current situation of the design and control of the project. Through XYZ three-axis ball screw pair, we complete the mechanical design of high-precision three-axis motion platform, and use Solidworks three-dimensional software to complete the modeling.Secondly, the selection calculation of stepping motor, linear grating and linear rolling guide is completed, and the controller is designed by using PID control algorithm.Through the circuit design of photoelectric encoder, I/O interface, stepper motor control and keyboard and display, and compiled part of the control program to complete the control system program. There are some deficiencies in the design, control scheme and programming, which need to be further improved.
Key words: ball screw stepping motor grating ruler rolling guide single chip compute
目录
摘要…………………………………………………………………………………..Ⅰ
Abstract…………………………………………………………………………….ǁ
第一章:绪论 1
1.1课题研究的意义 1
1.2高精度三轴运动平台的发展现状 1
1.2.1高精度三轴运动平台的设计现状 2
1.2.2高精度三轴运动平台的控制现状 2
1.3课题研究的主要内容 3
第二章:高精度三轴运动平台的机械设计 4
2.1设计要求 4
2.1.1技术参数 4
2.1.2设计内容 4
2.2滚珠丝杠副的设计与选型 4
2.2.1 X轴滚珠丝杠副 4
2.2.2 Y轴滚珠丝杠副 6
2.2.3 Z轴滚珠丝杠副 8
2.3本章小结 9
第三章:高精度三轴运动平台控制系统选型设计 10
3.1设计内容 10
3.2导轨的计算和选型 10
3.2.1直线滚动导轨的选型 10
3.3步进电机的选型计算 11
3.3.1减速箱的选型计算 11
3.3.2电机的校核计算 13
3.4控制器 16
3.4.1 PID控制器的设计 17
3.5光栅尺的选型设计 19
3.5.1光栅的选型 19
3.6本章小结 20
第四章:控制系统方案 21
4.1 控制系统的选择 21
4.2 微控制器的选择 21
4.3 控制构思 21
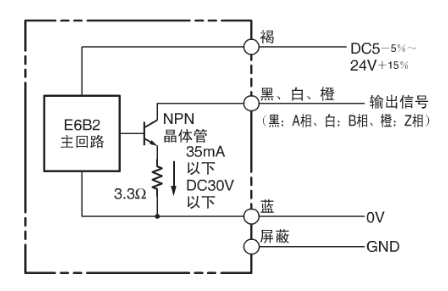
4.4 光电编码器的选用 22
4.5 I/O接口设计 23
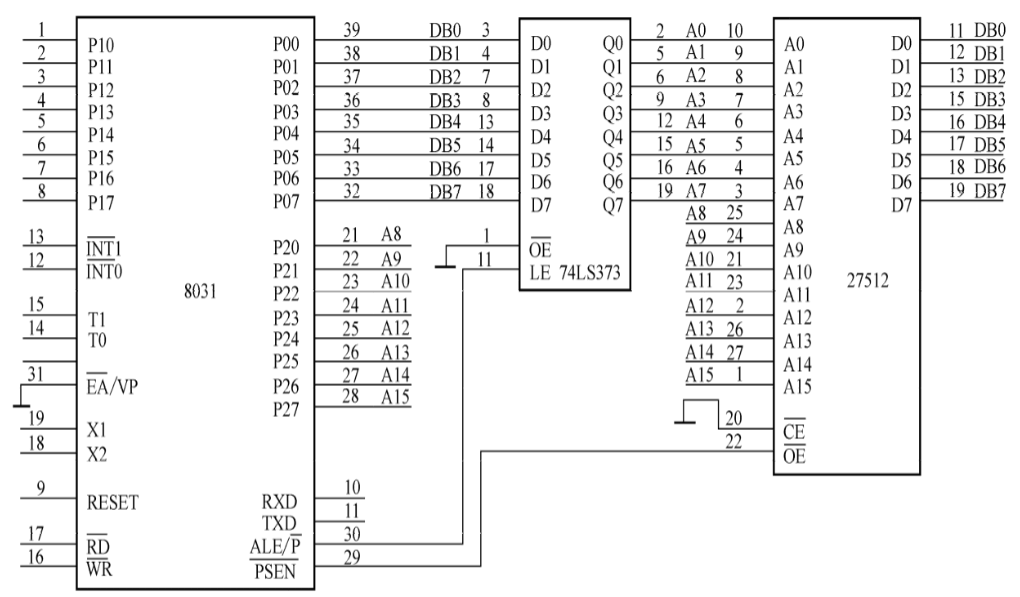
4.5.1 程序存储器及扩展电路 23
4.5.2 数据存储器及扩展电路 23
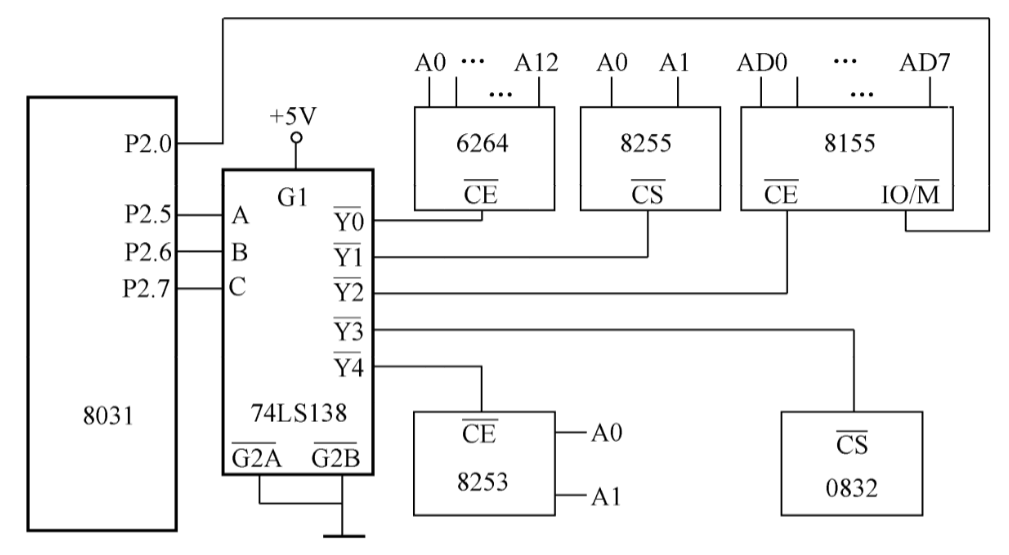
4.5.3译码电路 23
4.5.4 I/O接口电路 24
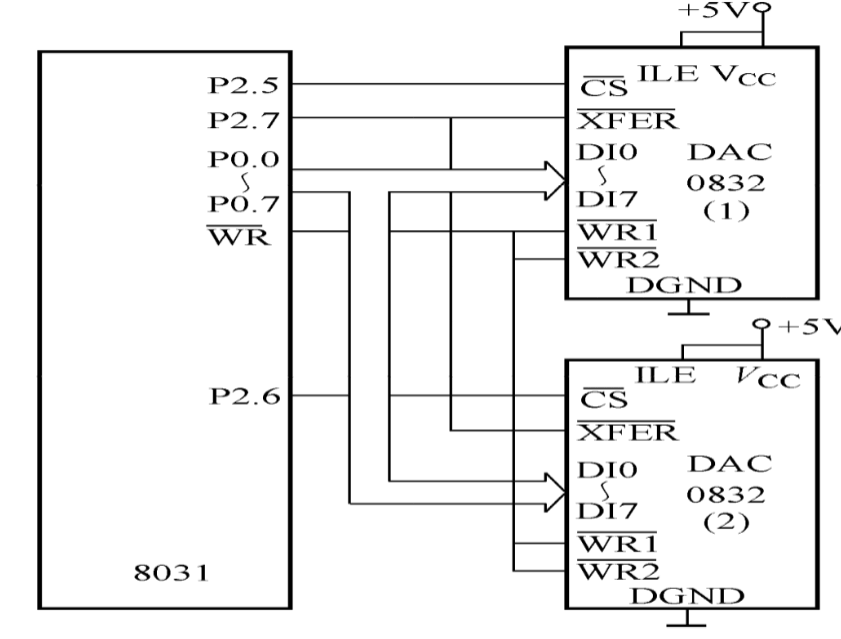
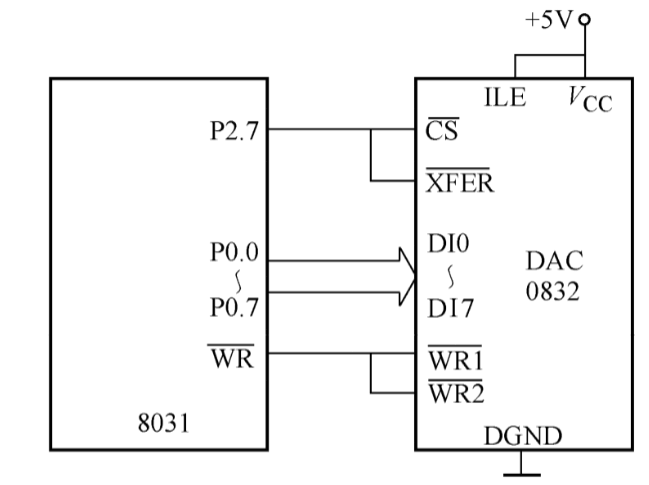
4.6 D/A转换接口电路 24
4.6.1 D/A转换器的选择 25
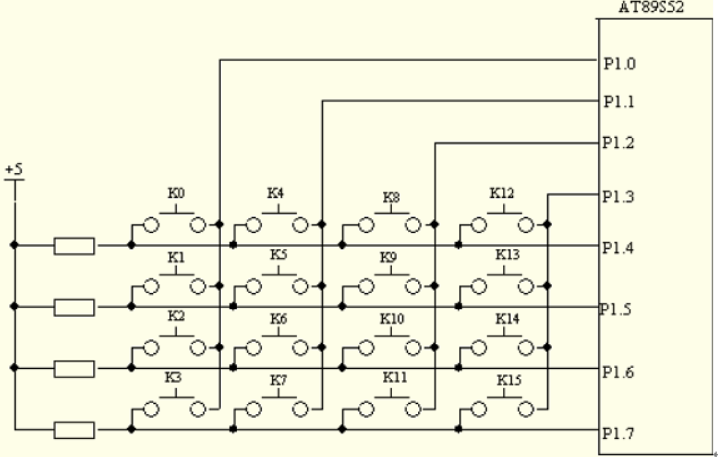
4.7 键盘与显示电路 25
4.8本章小结 26
第五章:控制系统相关程序 27
5.1控制总体方案 27
5.2 键盘功能的设计 27
5.3 步进电机的控制 29
5.3.1 正反转控制 29
5.3.2加减速控制 29
5.4行程开关 30
5.5本章小结 31
第六章 经济分析 32
第七章:论文总结与展望 33
参考文献: 34
致谢 36
第一章 绪论
1.1课题研究的意义
工业技术的发展已经成为了一种不可阻挡的力量,它的发展推动着世界的发展。与此同时,多轴运动平台也在逐步发展。由起初的一轴、二轴、三轴运动平台到多轴运动平台都随着工业技术进一步发展。大部分工业领域都已经应用了多轴控制技术,特别是在机器人、数控机床和医疗器械等方面。多轴运动平台 设备由性能好坏由控制系统来决定。目前,多轴运动平台应用较为广泛的是三轴运动平台。本文主要研究的是高精度三轴运动平台,它是利用三台步进电机分别驱动XYZ三轴运动的一种机械装备。它能解决传统设备刚度差、效率低以及响应速度慢的一系列问题。在大学实验平台、焊锡机、点胶机、插件机和测试机等都有一定的应用。适用范围广泛,包括定额液体填充和芯片的邦定、、半导体材料的封装以及按键类产品点胶、汽车零部件涂胶、电池盒点胶、PCB板零件固定和保护等。
高精度三轴运动平台拥有独特的特点,才能广泛的应用于多个领域。首先,它的三轴分别采用三台步进电机加皮带来驱动,能够实现运动的高速性和高一致性;其次,采用特定的合金材料和铸件,提高了产品的品质,同时能够保证在高速作业下不失稳,具有较强的稳定性;它拥有多种高技能运行功能,包括实现完成精度较高、快速三维插补和多功能的运行,以及能实现精密的旋转等。当给平台搭配上完整的控制程序,它能实现点、线、面以及不规则曲线的连续插补;最后,高精度三轴运动平台拥有完善的配置能缩短产品的生产周期。同时模块化的结构设计,有利于设备的维护保养。
高精度三轴运动平台应用范围较广,具有独特的优势,在各个领域所占的比重也越来越大,因此对于它的设计及控制就显得重要。能够设计并且能熟练控制高精度三轴平台将有利于机械工业的发展,也有利于加强机械设备融入社会推动经济的发展。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:

课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


