航天器自适应编队飞行控制方法毕业论文
2020-04-15 21:01:16
摘 要
航天技术经过近几十年的发展,所需承担的空间任务日趋复杂。传统的单一航天器方案已经无法很好的满足目前的航空任务,因此采用航天器编队飞行是一种很好的方法。在整个航天器控制系统中,它的姿态控制系统是一个极其重要的研究话题。航天器姿态控制系统算法设计的好坏将直接影响到整个系统的性能指标。本文研究两个航天器编队飞行时的姿态协同控制问题并设计了相应的算法。主要完成了以下几方面的内容:
首先介绍MRP的定义及由来,并以此推导出航天器的姿态运动模型。其次设计相应的姿态协同控制算法来解决所提出的问题,并通过Lyapunov函数给出理论上的证明。考虑到滑模控制是一种非线性控制方法,可以很好的运用到姿态控制系统。因此,本文考虑的惯量参数不确定及输入饱和等实际中无法避免的问题,可通过设计滑模控制器得到很好的解决。其中,此次设计的难点主要在于两方面:如何选择合适的滑模面以及滑模控制器的求取。
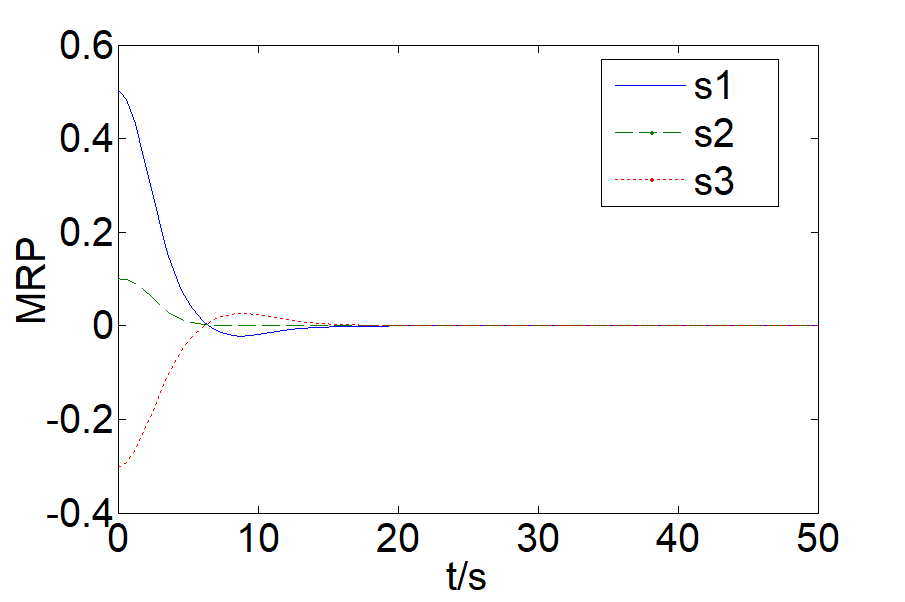
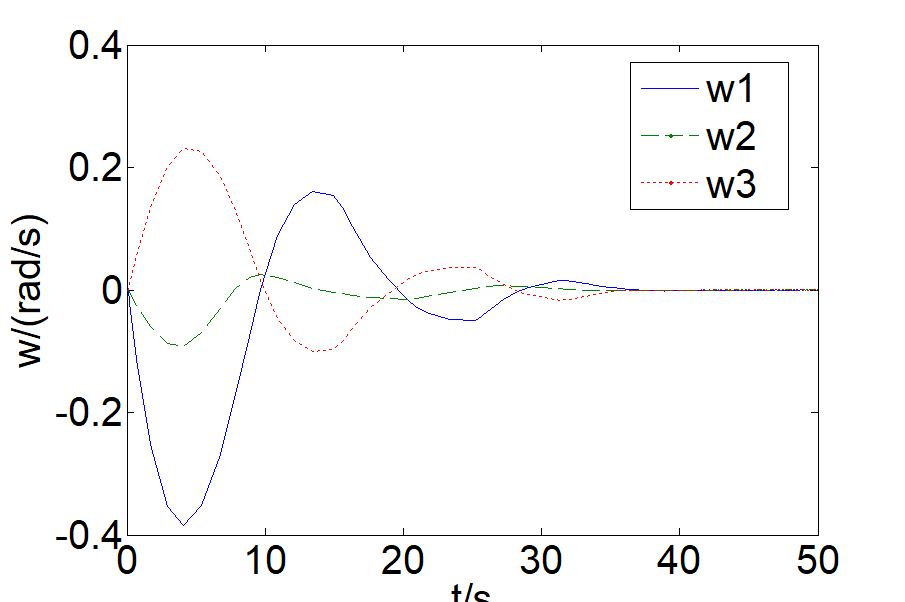
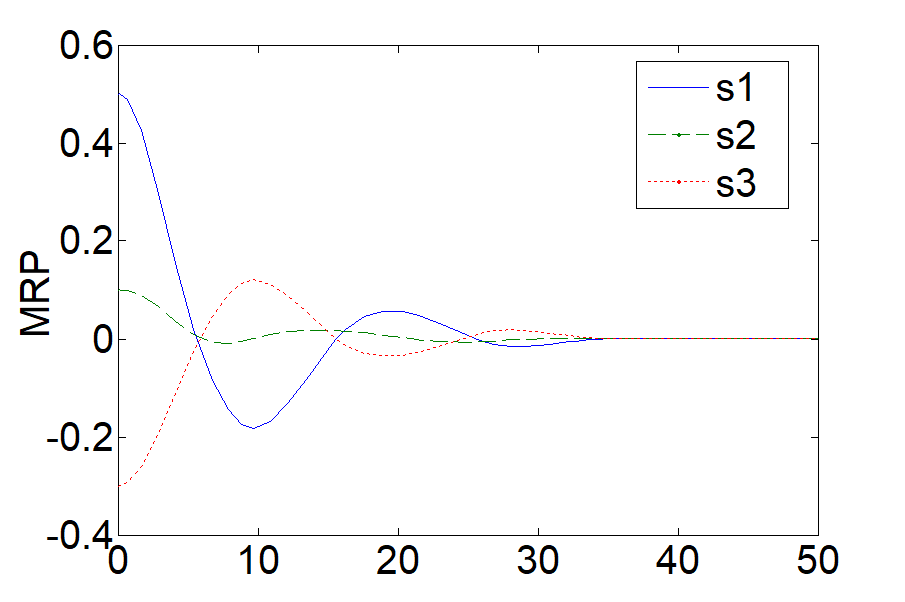
最后利用Matlab上的Simulink对所设计的控制器进行仿真验证,结果说明,所提出的姿态协同控制算法可以很好的解决所提出的姿态控制问题。
关键词:航天器 姿态控制系统 滑模控制 Lyapunov方法
Adaptive formation flight control method for spacecraft
Abstract
With the development of space technology in past several years, space missions have become more and more difficult. The traditional single spacecraft program has been unable to meet the current aviation mission, so using spacecraft formation flight is a good method. In the entire spacecraft control system, its attitude control system is a very significant research theme. The algorithm design of spacecraft attitude control system will straightly have a bad effect on the system. In this paper, the attitude control problem of two spacecraft in formation flight is studied and the corresponding algorithm is designed. Mainly completed the following aspects:
Firstly, the definition and origin of MRP are introduced, and the attitude motion model of spacecraft is deduced. Secondly, the corresponding attitude cooperative control algorithm was designed to solve the proposed problem, and the theoretical proof was given through the Lyapunov function. Considering that sliding mode control is a nonlinear control method, it can be well used to attitude control system. Therefore, the problem of inertia parameter uncertainty and input saturation, which can not be avoided in practice, can be solved by designing sliding mode controller. Among them, the difficulty of this design mainly lies in two aspects: how to choose the suitable sliding surface and how to obtain the sliding controller.
Finally, the controller is simulated by Simulink on matlab. We can see that the proposed attitude control algorithm can solve it well.
Key words: spacecraft; attitude control system; sliding mode control; Lyapunov method
目录
摘要 I
Abstract II
第一章 绪论 1
1.1课题研究背景及意义 1
1.2 国内外研究现状及分析 1
1.3航天器姿态控制系统及研究方法分析 2
1.3.1航天器姿态控制系统概述 2
1.3.2航天器姿态研究方法分析 3
1.4航天器编队飞行控制 4
第二章 航天器数学模型及理论基础 6
2.1航天器数学模型 6
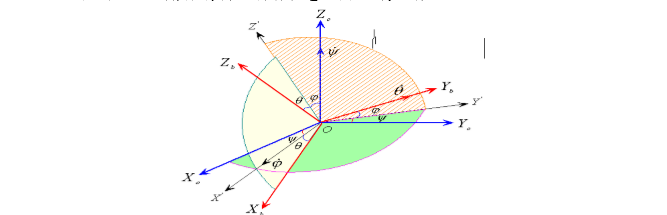
2.1.1参考坐标系 6
2.1.2航天器姿态参数描述 7
2.1.3航天器数学模型 9
2.2控制理论基础 10
2.2.1李雅普诺夫理论基础 10
2.2.2滑模控制理论基础 11
第三章 自适应控制器设计 14
3.1引言 14
3.2姿态调节控制器设计 14
3.2.1控制器设计 14
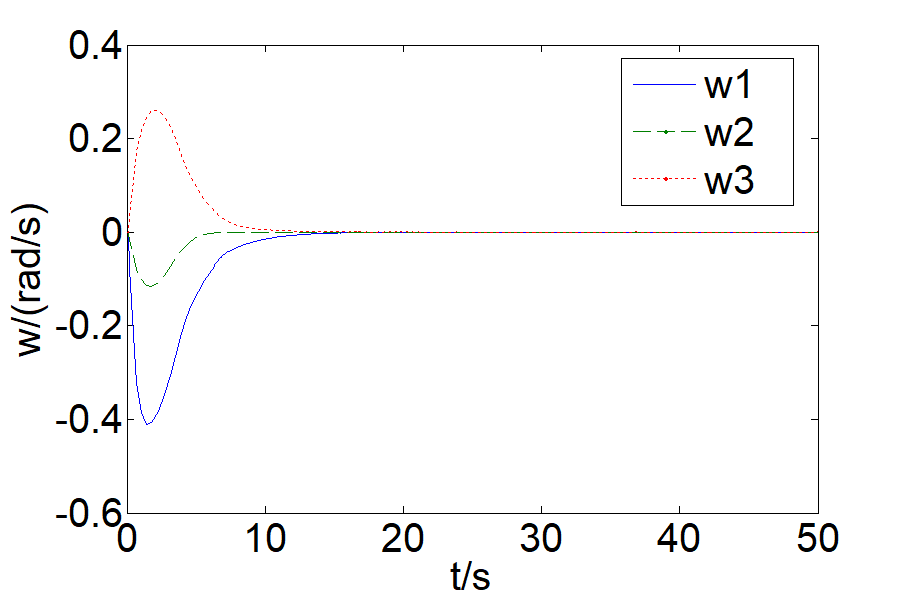
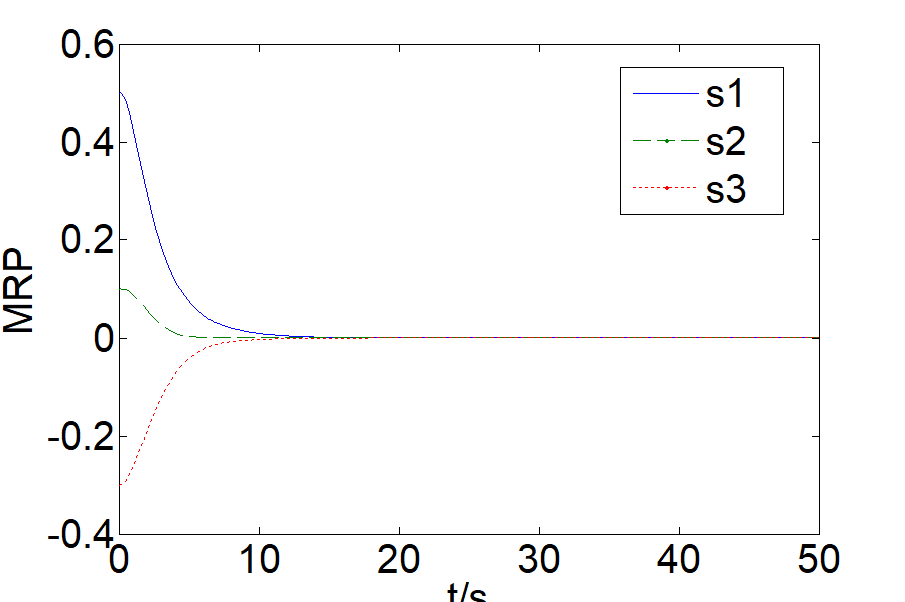
3.2.2仿真结果 16
3.3姿态跟踪控制器设计 17
3.3.1控制器设计 17
3.3.2仿真结果 19
第四章 输入受限自适应控制器设计 21
4.1引言 21
4.2姿态调节控制器设计 21
4.2.1控制器设计 21
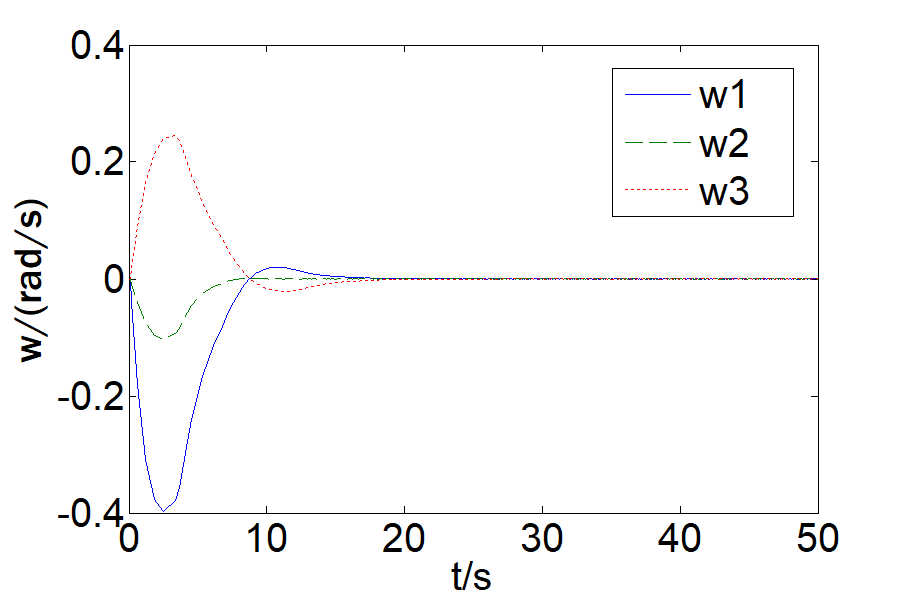
4.2.2仿真结果 23
4.3姿态跟踪控制器设计 25
4.3.1控制器设计 25
4.3.2仿真结果 27
第五章 结论 30
参考文献 31
致谢 34
第一章 绪论
1.1课题研究背景及意义
由于各国相继对航天领域投入大量的研究,航天器所需实现的任务也日趋复杂。传统的单颗小型航天器方案已经不能很好地执行各种太空任务,因此国际航天领域的众多学者和研究人员对多颗航天器编队飞行方案展开了大量的研究。与以前的方案相比较,编队飞行方案节省费用、抗扰动等优势是使用它的主因之一。这种系统通常来讲是指由一颗主航天器和若干颗从航天器组成,整个编队系统中所有的单个航天器通过共同工作来实现比单个更强大的功能。
在航天器编队飞行系统中,其姿态控制问题一直是研究的热门话题。航天器的姿态控制系统可以说是整个航天器系统的核心部分,其中控制算法设计的优劣会直接影响到整个编队飞行系统的性能好坏。因此可以说航天器的姿态只有被确定和可控时,它的控制系统才是有用的,相反若其姿态无法确定,对于航天器控制系统的研究也就没有意义。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


