多传感器检测的信标追踪智能车设计与开发毕业论文
2020-04-15 21:01:58
摘 要
随着微电子技术的发展,智能车作为现代科技的新兴产物越来越多的出现在我们的生活中。智能车可以凭借车上装备的多种传感器自动的感知周围环境,并且在不需要人为干预的条件下,自行完成障碍物规避、线路优化、自动启停等复杂的功能。因此智能车相关技术的研究具有深刻的实用意义。本文设计了一种基于多传感器检测的信标追踪智能车系统,该智能车通过图像采集和传感器检测感知周围环境,判断信标方位并进行追踪,同时在运行过程中实现对障碍物的规避。
具体内容包括:
- 系统方案设计:由信标智能车需要完成的任务要求,分析信标追踪智能车应具备的功能,并设计相应智能车系统方案。
- 系统硬件设计:该系统选用了恩智浦的32位处理器MK66作为核心控制模块,并通过图像采集模块、红外检测模块、速度检测模块等判断环境信息和智能车运行状态。
- 系统软件开发:编写程序通过对图像数据进行处理从而判断信标方位,同时驱动智能车向目标位置行驶。过程中逻辑判断障碍物信息并进行避障处理。在调节电机转速时使用PID控制算法使转速能够快速达到期望值,从而使智能车更加快速稳定的运行。
- 功能测试与性能提升:对已设计各个模块功能进行检测和数据分析,判断其是否能够达到任务要求,最后对智能车整体功能调试。
关键词:图像采集 多传感器检测 信标追踪 智能车 智能控制
Multi-sensor detection beacon tracking intelligent vehicle
Abstract
With the development of microelectronic technology, intelligent vehicle as a new product of modern technology is more and more appearing in our life. The intelligent vehicle can automatically perceive the surrounding environment with a variety of sensors equipped on the vehicle, and complete the complex functions such as obstacle avoidance, line optimization and automatic start and stop without human intervention. Therefore, the research of intelligent vehicle technology has profound practical significance. In this paper, a beacon tracking intelligent vehicle system based on multi-sensor detection is designed. The intelligent vehicle perceives the surrounding environment through image acquisition and sensor detection, judges the beacon position and tracks it, and realizes obstacle avoidance during operation.
Specific contents include:
(1) System scheme design: analyze the task requirements to be completed by the beacon intelligent vehicle, analyze the functions of the beacon tracking intelligent vehicle, and design the corresponding intelligent vehicle system scheme.
(2) System hardware design: this system uses NXP's 32-bit processor MK66 as the core control module, and judges the environment information and the running state of the intelligent vehicle through image acquisition module, infrared detection module, speed detection module and other modules.
(3) System software development: the program is written to determine the beacon position by processing the image data, and drive the intelligent vehicle to the target position at the same time. In the process, the obstacle information is judged logically and the obstacle is avoided. When the motor speed is adjusted, PID control algorithm is used to make the speed quickly reach the expected value, thus making the intelligent car run more quickly and stably.
(4) Functional testing and performance improvement: test and analyze the designed functions of each module, judge whether it can meet the task requirements, and finally debug the overall functions of the smart car.
Keywords: Image acquisition, Multi-sensor detection, Beacon tracking, Intelligent vehicle, Intelligent control
目 录
摘要 I
Abstract II
第一章 绪论 1
1.1 引言 1
1.2 智能车的发展现状 1
1.2.1 国外智能车发展现状 1
1.2.2 国内智能车发展现状 2
1.3 本文课题研究内容结构安排 3
第二章 多传感器检测的信标追踪智能车方案设计 5
2.1 信标智能车任务要求 5
2.2 多传感器检测的信标追踪智能车控制系统分析 5
2.2.1 图像识别处理系统 5
2.2.2 红外定位系统 5
2.2.3 自动避障系统 6
2.2.4 速度检测与控制系统 6
2.2.5 人机交互系统 6
2.2.6 信息处理及控制系统 6
2.3 车模的选择 6
2.3 智能车控制器选型 7
2.4 信标追踪智能车传感器选型 8
2.4.1 图像采集传感器 8
2.4.2 红外测距传感器 9
2.4.3 速度传感器 10
2.5 OLED显示模块 10
2.6 电路设计开发平台 11
2.7 软件开发环境 12
2.9 本章小结 12
第三章 智能车硬件设计 13
3.1 图像采集模块 13
3.2 电源管理模块 14
3.3 电机驱动模块 14
3.5 速度检测模块 15
3.6 OLED显示模块 16
3.7 核心控制模块 16
3.7.1 电源滤波电路 17
3.7.2 晶振电路 17
3.7.3 复位电路 18
3.8 智能车系统电路板的设计绘制 18
3.9 电路板与各传感器的安装 19
3.9.1 摄像头的安装 19
3.9.2 编码器的安装 20
3.9.3 磁标的安装 20
3.9.4 电路板安装 21
3.10 本章小结 22
第四章 智能车软件系统设计 23
4.1 智能车主程序设计与开发 23
4.2 信标位置识别程序 23
4.2.1 图像采集 24
4.2.2 信标位置获取 25
4.2.3 图像滤波处理 25
4.3 避障系统程序 25
4.4 电机转速PID控制程序 26
4.4.1 PID控制基本原理 26
4.4.2 智能车电机的PID控制 27
4.4 本章总结 27
第五章 系统调试 28
5.1 智能车运行场地环境搭建 28
5.2 各模块功能调试 28
5.2.1 信标定位系统调试 28
5.2.2 避障系统调试 30
第六章 总结与展望 32
第一章 绪论
1.1 引言
所谓智能车,是能够按照人们的意愿,在无人干预的情况下车辆自主的完成一系列动作,如环境感知、自主避障,循迹行驶,路径选择和自动泊车等。智能车是现代科技发展以及多门学科融合而得到的产物,它包含了微电子技术、图像识别、单片机技术、电机学、自动控制等多门学科。现如今,智能车技术在一定程度上体现了国家的科研水平能力以及工业实力。
随着科学技术的高速发展,智能车相关技术已经日趋成熟,不论在军事、生活还是工业领域,我们都可以看到智能车的身影。例如在军事领域,一些发达国家正在研发的“无人战车”就是智能车在军事领域得到的应用成果,近年来随着对军用智能车的深入研究,一些智能车已完成到实用测试[1]。在日常生活领域中,工程师将车辆技术与智能控制相结合,研发出可在城市道路自动驾驶的无人驾驶汽车,很多国家对于无人驾驶汽车方面的研究都已取得了巨大的进展,一些高科技公司研制的无人驾驶智能车已完成了数百万公里的道路测试。
尽管在过去一段时间里智能车技术得到了极大的发展,在部分领域内取得了实质的突破,然而在一些方面仍面临着不少的问题和挑战。尤其我国在智能车方面起步较晚,而近年来电子技术与单片机技术的不断成熟和智能车技术的快速发展,智能车领域的需求日益增加。
为了培养智能车相关人才,提高大学生知识应用能力和创新意识,我国教育部高等学校自动化专业教学指导分委员会创办了“全国恩智浦智能汽车竞赛”[2],本文以该竞赛中信标组为背景,实现设计与开发。
1.2 智能车的发展现状
1.2.1 国外智能车发展现状
智能车的发展可追溯到上世纪七十年代,在汽车技术日趋成熟和电子计算机技术高速发展的条件下,西方发达国家开始研究由计算机自动控制的自动驾驶汽车的可能性,一些计算机行业的领军者与汽车行业合力探索研发智能车无人驾驶技术。
由于西方国家的重视和大力支持,智能车在技术上很快取得了突破性的进展,设计出了可在简单环境下自主行驶的智能车。1995年,一辆由卡耐基梅隆大学研制的无人驾驶汽车Navlab-V完成了穿越美国东西部的无人驾驶实验,在全长五千公里的美国州际高速公路上,完成了96%以上的无人驾驶路程,最高车速可达到六十公里每小时[3]。
随着几十年的技术发展和不断完善,近年来以美国的谷歌和特斯拉为代表的智能无人驾驶汽车技术已达到了世界领先水平。作为最早提出并实际投入发展无人驾驶智能车技术的公司,谷歌采用了基于传感器道路识别感知和卫星导航技术来实现无人驾驶,他们的无人驾驶智能车通过摄像头、激光和雷达等距离传感器来检测车辆周围的环境和路径,并使用卫星进行导航。计算机将获取到的数据和车辆行驶信息加以汇总和分析处理,然后发出相应指令控制车辆,从而达到使无人驾驶智能车安全平稳地行驶。
Google公司的无人驾驶汽车的研发理念是计算机将完全取代人类驾驶,最初Google研发的无人驾驶汽车要求驾驶员坐在方向盘的后面,以便有突发状况时能够代替计算机接管汽车。但2013年的实验之后,Google公司决定坚持走用计算机完全取代人类驾驶的路线,因为其相信在危机发生时,不存在驾驶员从分心状态下回过神来比计算机系 统的反应速度更快的可能。所以,至今Google公司的无人驾驶汽车没有方向盘、刹车踏板和加速器,完全由计算机系统全程控制[4]。
目前智能车相关领域飞速发展,得到了各国政府、高科技公司和汽车行业的大力支持,世界各国都在争先发展想要成为智能车行业的领导者。
1.2.2 国内智能车发展现状
我国无人驾驶智能车相关方面的研究相对于西方发达国家来说起步比较晚,而且在早期受到的重视程度并不高,当时国内对智能车的研究主要集中在一些大学高校之中。但后来随着国家的重视和我国综合实力的提高,许多科研单位也开始投入对智能汽车的研发,我国智能汽车的发展开始迅速发展。2015年研制的百度无人驾驶汽车更是完成了我国至今最大规模公路测试,在路况复杂的道路上完成了变道、超车、掉头等复杂动作,最高时速达到了100公里,代表我国目前最先进无人驾驶技术[5]。
为了增强大学生对智能车相关技术的兴趣,提高大学生创新能力以及实践能力,近年来我国举办并发展了许多大学生智能车竞赛。最具有代表性的为“飞思卡尔”全国智能车大赛,该智能车竞赛起源于韩国,在2005年引入到中国,“飞思卡尔” 杯智能汽车比赛的综合性很强,是以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感、电子、电气、计算机和机械等多个学科交叉的科技创意性比赛,主要由路径识别、角度控制及车速控制等功能模块组成[6]。该智能车竞赛迄今为止已举行十三届,在十三年的不断发展和完善中,该比赛任务从最开始的简单红外传感器或摄像头循迹,到后来分组别进行光电组、摄像头组、电磁组,再到如今各种车模和传感器的选择、多样的赛道元素,还有每年会设置创意组比赛。在比赛规则日益完善的同时,大学生们的学习动手能力和创新水平也在不断地进步,每年都会出现更好的设计方案和比赛成绩。
1.3 本文课题研究内容结构安排
第一章绪论部分首先介绍了什么是智能车和智能车包含的学科门类,阐述了智能车在生活中生活、军事、工业领域的应用。之后分别简单概括了国内外智能车领域的发展现状。该章节引导出本论文的写作目的和意义。
第二章为多传感器检测的信标追踪智能车方案分析,该章节从恩智浦智能车竞赛信标组规则入手,分析得出本课题所研究智能车需要完成的各项功能,然后对比挑选能够完成各项功能的合适的控制器和传感器,最后选择出软件编程和硬件开发所需要的软件。
第三章为智能车硬件部分电路设计,该章节分别介绍了各个模块功能实现所需要的电路设计,包括电源模块、摄像头图像采集模块、电机驱动模块、点击检测模块等,另外还有控制系统最小模块及其周围电路设计。该部分为多传感器检测的信标追踪智能车提供了硬件部分的保障。
第四章为智能车整体架构组成分析,本章首先介绍了智能车车模的选型,然后根据需求分析得出各个传感器的安装方式和位置,该过程使得智能车上每个模块连接在一起,成为了具有能够实现各种功能的一个整体。
第五章为智能车软件系统设计,首先整理了该课题信标追踪智能车的主要程序流程,然后逐个分析图像识别系统、避障系统等各个模块的软件设计,同时介绍了信标定位和PID控制算法。
第六章为系统调试,该章节分别阐述了信标追踪智能车各个模块的调试过程和其中遇到的问题,并由此提出解决方案。最后整车调试从而达到理想运行状态。
第二章 多传感器检测的信标追踪智能车方案设计
2.1 信标智能车任务要求
根据信标智能车需要完成的任务规则,信标组会在场地区域中随机摆放五到十五个左右的信标,他们统一由系统控制随机亮灭,在排位预赛中,要求将制作的智能车放置于规定的发车区域内,这个时候所有的信标都是处于熄灭的状态,等待比赛开始后,系统将自动随机启动其中一个信标,被启动的信标会发出声光信号进行引导。这时参赛的智能车需要通过对引导信号的识别作出反应确定启动信标的位置,然后通过车辆控制定向移动到启动信标的位置处,当安装磁标触发装置的智能车行驶运动到信标附近的感应线圈位置以后,该信标将自动熄灭同时系统将自动随机启动另外一个信标,此时智能车需前往至新的启动信标位置处。这个过程重复进行十次以上,直到信标引导智能车将最后一个信标熄灭为止[7]。
在对抗决赛中,规则要求两辆智能车同时在比赛场内识别并熄灭信标,在规定时间内熄灭信标多的智能车获胜。
2.2 多传感器检测的信标追踪智能车控制系统分析
按照前述智能车任务要求进行分析,可将该智能车分为如下多个系统:
2.2.1 图像识别处理系统
该智能车的任务要求最主要的是识别并分析场地内的图像信息,从而判断信标的位置。对于获取图像信息,可采用摄像头获取数字图像数据,数字图像具有容易储存和压缩传送等特点,通过对数字图像主要特征的识别,将图像中的数据信息进行处理和筛选,结合计算机的分析,可得到目标信息[8]。在本系统中,将使用摄像头获取场地信息,分析计算信标在场地中的位置,从而控制智能车运行状态。
2.2.2 红外定位系统
由于信标发出的引导引号包含可见自然红光和不可见红外光线,为了更加快速和精确定位信标位置,除了上述图像识别处理系统外,加以设计由多个红外传感器组成的红外定位系统,红外传感器可检测信标的方位信息和距离信息,从而辅助检测信标位置信息。
2.2.3 自动避障系统
在智能车行驶过程中,点亮状态的信标提供了车子行驶的目标方向和距离,但与此同时,熄灭状态的信标和对抗中的其他智能车成为了智能车行驶路径中的障碍物,应不与其发生接触和碰撞。因此,自动避障系统必不可少,为实现自动避障这一功能,需要基于距离传感器的检测系统来实现目标。
2.2.4 速度检测与控制系统
该智能车实现的信标检测与追踪功能需要达到精确和快速的基本要求,为了使智能车更加快速和高效的完成熄灭信标任务,需要在发现点亮状态的信标时相其加速行驶,并在接近信标的时候减速靠近,避免与其发生碰撞,同时在转弯和速度调节时需要对速度进行PID调控,这一系列闭环控制需要获取电机转速从而达到对智能车运行状态更好的控制。
2.2.5 人机交互系统
在信标追踪智能车的设计和调试过程中,需要大量的实验数据和参数调整,甚至需要对智能车运行模式进行多方案设计和调整,在这一过程中每次都通过电脑修改程序参数和模式是极其复杂和效率低下的,并且难以发现每次运行的效果差异,而通过人机交互系统,调试人员可在调试界面获取每次运行数据,并可通过按键等模块修改行驶参数和模式,以便更加高效快捷的完成智能车的系统调试。
2.2.6 信息处理及控制系统
信标引导智能车需要多系统、多模块来综合控制智能车运行,通过对以上各个系统的功能可实现智能车上某一特定的功能,而对智能车整体的运行分析和控制,需要单片机进行逻辑分析和综合控制。核心处理器能够将各个系统模块获取和反馈的信息进行接收和综合处理,从而利用相应的算法得到输出来控制智能车的各个功能正常运行。
2.3 车模的选择
根据该组别智能车的要求,我们选择了恩智浦智能车竞赛专用H车模,如图4-1。该车模由四个380电机控制四个麦克纳姆轮,动力强劲,可以原地360°旋转,具有灵活、迅速等特点,且该车模底盘为高强度玻纤材料,坚固耐撞,比较适合信标追踪智能车可能会出现强力碰撞的情况。

图 4-1 H车模
2.3 智能车控制器选型
K66是恩智浦公司的一款基于ARM Cortex-M4内核的微控制器,如图2-3,具有强大的可扩展性,一次能够处理32位数据,具有较强的数据处理能力,能够轻松处理图像信息[9]。

图 2-1 K66芯片
2.4 信标追踪智能车传感器选型
在计算机技术和嵌入式的高速发展的背景下,传感器的应用领域也在不断扩大。随着电子信息技术的发展,人们可以借助计算机来获取传感器的数据从而扩展了信息的来源,在更准确获取信息的同时通过电远传减少了信息处理的时间,给生活和工作带来了极大的便利[10]。
对于智能车来说,传感器在自动控制系统中扮演者重要的作用,可以将传感器比作智能车的眼睛等感受器官,选择正确的传感器可以使智能车更加高效快速和准确的获取行驶路途中所需要的环境信息和小车运行状态,从而控制智能车的运动模式。因此,需要对智能车的各个功能加以分析来决定传感器的选择。
2.4.1 图像采集传感器
对信标引导智能车任务要求分析可知,该智能车首先要完成的任务是获取场地信息,识别信标的点亮和熄灭状态,从而判断需要运行的方向。所以该传感器将直接决定是否能够使智能车完成方向判断。
对于图像的识别和获取,可采用的传感器通常为图像传感器,该传感器可将光学影像转化为电子信号。现在市场上常见的图像传感器主要分为CCD和CMOS,他们的具体对比如表2-1所示:
表2-4 CCD与CMOS图像传感器对比
CCD | CCD图像传感器的原理,是其表面在光线的投射下可产生电荷,电荷信号可以转化为电压并按照特定的时序输出,从而使光学图像信号转化为数字信号。CCD图像传感器的元件数多,功耗高,成本也相对较高,而数据传输速率一般不超过每秒70万像素。 |
CMOS | CMOS图像传感器是一类有源像素传感器,它支持连续和隔行两种扫面方式,VGA与QVGA两种图像格式,最高像素为640×480,帧速率为30fps,数据格式包括YUA、YCrCb、RGB三种,能够满足智能车图像采集系统的要求[11]。 |
相比之下,CMOS图像传感器一方面图像质量满足要求,同时相对于CCD更加经济,所以选择使用CMOS图像传感器,本课题选用较为常用的OV7725摄像头,而市面上的OV7725摄像头又有彩色和硬件二值化的黑白摄像头。分析本文研究的智能车要求完成信标引导,在场地环境中,目标信号为点亮状态信标发出的可见红光和不可见红外光,而其他光线信号为干扰信息,为了简化数据分析和计算,可选用硬件二值化摄像头这样可提高计算效率简化逻辑分析。综上分析,考虑使用总钻风OV7725摄像头作为图像传感器,如图2-2。
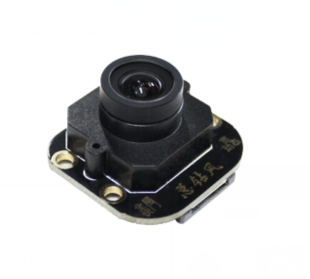
图 2-2 coms摄像头
2.4.2 红外测距传感器
通过上述图像传感器可获得点亮信标的方位和大致距离信息,但是由于摄像头经过硬件二值化和滤光处理后,只能获取到发出红外信号的点亮状态的信标位置,而其他图像信息如熄灭状态的信标、场地边界和场地中行驶的其他智能车对处理过的摄像头来说相当于一片黑暗,无法获取其位置信息,但智能车在行驶中需要避免与其发生碰撞,因此需要测距传感器来获取智能车行驶过程中小车前方的障碍物距离信息。常见测距传感器有红外距离传感器、超声波距离传感器等。
表2-2 常用距离传感器对比
红外测距传感器 | 红外距离传感器通常是一对红外对管,其中由一个近红外发光二极管(发射管)和一个近红外光电二极管(接收管)组成[12]。其工作原理是发射管会发出一定波长经过调制后的红外光,红外光在接触物体表面后发生反射,再由接收管测得反射回来的红外光,根据发射管发出的时间和接收管接受的时间得到时间差,然后根据距离公式计算得出传感器与障碍物之间的距离。红外距离传感器的优点是,传感器自身体积小,测量精度高,价格便宜。缺点是方向性差,且由于黑色物体吸收红外光,该传感器无法测量黑色物体距离。 |
超声波距离传感器 | 超声波测距传感器与红外测距传感器原理相似,由超声波发射端和超声波接收端组成,发射端发出调制后的超声波信号,碰到障碍物后反射,接收端接收到信号,根据时间差计算得出距离信息。超声波距离传感器的优点是价格便宜,不受测量物体颜色影响。缺点是体积相对红外距离传感器较大,不易安装,方向性差。 |
综上对比得出,选用红外传感,由于红外传感器体积较小,可在智能车前方安装多个传感器测量多方位障碍物信息。
2.4.3 速度传感器
为调节智能车的运行状态,如在电机堵转时控制智能车倒退重新启动、控制智能车速度和转弯PID闭环控制调节,这些参数的控制都需要对运行时的速度进行获取。常用的测速方法有以下两种:
(1)光电编码器:电机通过传动机构转动带动编码器转动,光通过编码器上的开孔盘的缝隙反射到内部光敏元件上,根据旋转次数就可以测出旋转体旋转速度。并将其转换为脉冲信息输出给控制器。
(2)霍尔传感器:通过检测绑在电机转轴上的小磁钢旋转次数。每检测一个输出一个脉冲给控制器,即可检测当前速度。
编码器和霍尔传感器的测速原理很像,最终都是输出电脉冲给控制器,但是光电编码器相比霍尔传感器的精度更高,安装更加方便。因此本文选用了光电旋转编码器,如图2-3。

图 2-3 三相增量式旋转编码器
2.5 OLED显示模块
当智能车拥有了核心控制模块、各个传感器模块和驱动电机之后,其基本功能模块已经完备,但为了方便调试,如让调试人员更加清楚地看到摄像头获取的场地信息,每个传感器得到的相应参数、PID参数设定值等信息,需要在该智能车上安装一显示模块来更直观和便捷的调试运行。
常见的显示屏模块有LCD显示模块和OLED显示模块,我们选取了常用的两款显示屏,对比信息如下:
TFT-LCD显示模块:该显示模块包含一个1.4寸LCD显示屏和一个五轴按键,显示屏为128*128像素,可显示彩色图案,共有20个引脚。
OLED显示模块:该显示屏为0.96寸OLED屏幕,如图2-4,可以显示两种颜色,为128*64像素,共有横向128个像素点和总想64个像素点,每个像素点都只有0(灭)和1(亮)两种状态,由像素点的亮灭组成图像。
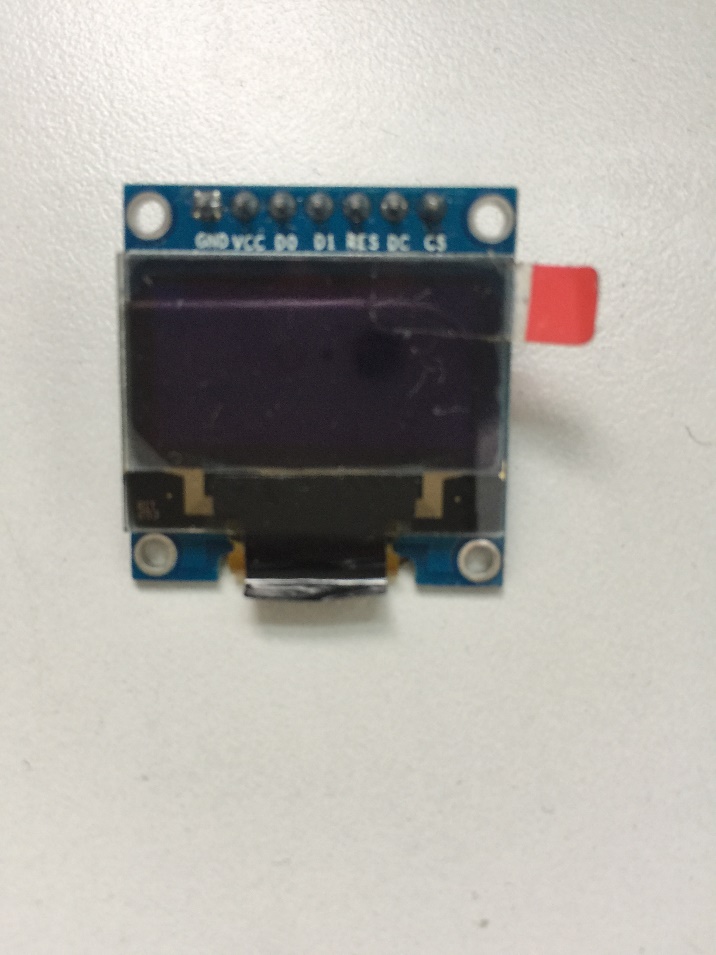
图2-4 OLED显示屏
对比两款显示屏LCD液晶显示屏虽然功能强大能够显示彩色图像并配有五轴按键,但考虑到此系统需要将图像进行二值化处理,所以彩色图像对于该方案来说是多余的,并且OLED体积较小引脚简单便于安装,同时考虑到价格因素,方案选用OLED显示模块。
2.6 电路设计开发平台
除了硬件选型外,还需要设计电路板将各个模块连接在一起,本课题选用电路设计最常用的开发软件Altium Designer,该软件功能强大,可绘制电路原理图和PCB图,拥有较为完备的封装库简单的操作,是电路设计开发的最佳选择。
2.7 软件开发环境
对控制器的软件编程选用IAR Embedded Workbench 编程软件,该软件是专为ARM微处理器开发的一个开发环境,该软件集代码编写、编译、调试、下载等功能于一体,功能齐全,使用方便[13]。
2.9 本章小结
本章从多传感器检测的信标追踪智能车需要完成的任务入手,分析该智能车需要具备的所有功能,从而确定各个功能模块。然后由功能模块考虑需要使用的控制器和传感器,选择多款方案进行对比,比较其优缺点确定最终选型。章末介绍了本课题选用的开发软件和电路设计软件。
第三章 智能车硬件设计
硬件部分相当于智能车的躯体和筋骨,良好的硬件设计和连接在智能车行驶中起着至关重要的作用。一个良好的硬件部分设计应该在完成其应有的功能的同时尽量简化,这样才能在调试时最快发现问题所在,同时降低其制作成本。
根据本文对多传感器检测的信标追踪智能车的功能分析可以得出,该智能车的硬件部分可大致分为一下部分:图像采集模块、电源管理模块、电机驱动模块、红外测距模块、速度检测模块、LCD显示模块、核心控制模块等。
3.1 图像采集模块
前文在传感器选择中提到本课题选用硬件二值化的总钻风OV7725摄像头作为图像传感器来采集场地信标位置信息。
OV7725拥有640×480的感光阵列,有效像素达到307200,该传感器的分辨率、图像特征、数据输出格式等都可以很方便的进行人为初始化配置,这样就可以很好的满足不同的设计需求[14]。
OV7725的接口包括场中断信号线VSYNC、行中断信号线HREF、时钟信号线PCLK、SCCB控制信号线SIO_C和SIO_D,另外还包括数据信号线Y0~Y7、电源引脚等[15]。引脚核心控制模块连接如图3-1。
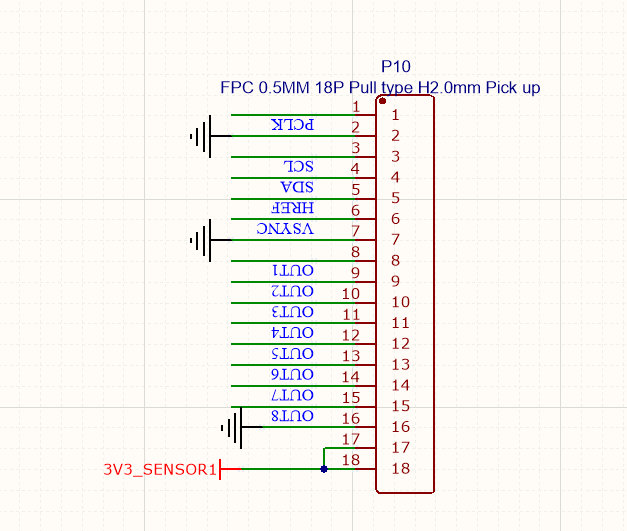
图 3-1 摄像头模块引脚连接
3.2 电源管理模块
电源是给智能车运行提供动力的装置,该智能车上配置的电池为额定电压7.2V的镍铬电池,但智能车上各个模块所需要的电压各不相同,该电压不能不经处理直接给其他模块供电,因此需要电源管理模块将电源管理模块将该电池电压转化为稳定的各模块所需电压。
由各个传感器的参数可知,该系统需要向编码器提供5V的稳压电源,向摄像头模块、LCD显示模块和核心控制模块提供3V稳压电源。电压转化如图3-2和图3-3所示。
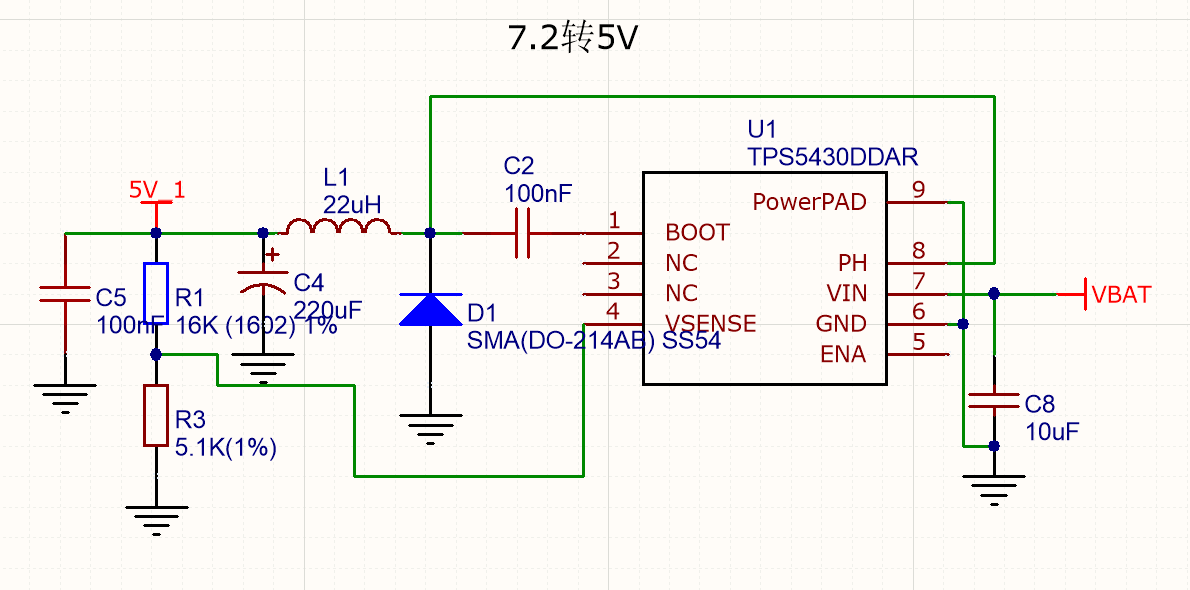
图 3-2 7.2V转5V电路原理图
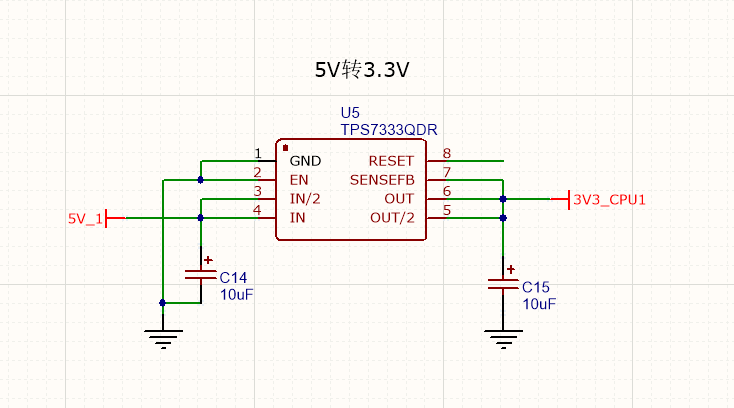
图3-3 5V转3V电路原理图
3.3 电机驱动模块
电机驱动电路使用N沟道MOSFET和专直流电机电流检测电路的设计用栅 极驱动芯片设计,N沟道MOSFET选用IR公司TO-252封装的IRLR7843,IRLR7843具有极低的导通电阻RDS=3.3mΩ,耐压值可达30V,电流可达161 A,使用四个IRLR7843可构成H桥驱动电路,实现电机正反转,专用栅极驱动芯片选用IR公司的 IR2104,IR2104栅极驱动电路可以提高MOSFET的开关速度,并且具有防同臂导通 、硬件死区、欠电压保护等功能,可以提高电路工作的可靠性[16]。如图3-4所示。
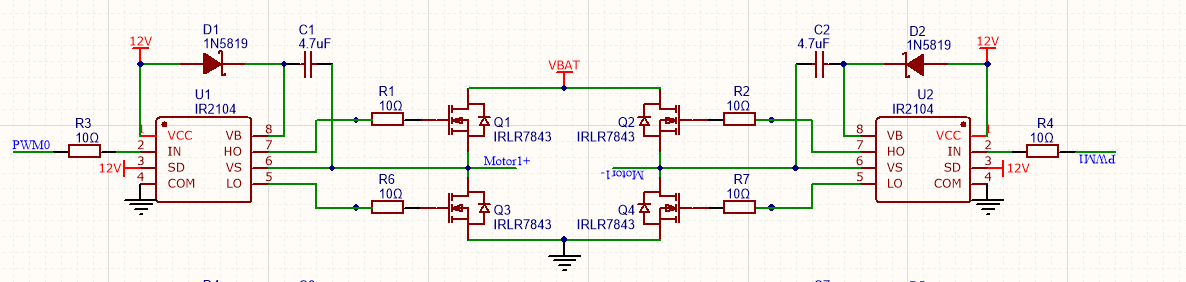
图 3-4 电机驱动电路
3.5 速度检测模块
速度检测模块选用的使512线min三相增量式旋转编码器,该编码器有六根引脚,分别为3.3~5V电源VCC、电源地GND、步进脉冲引脚LSB、旋转方向Dir、Z向和空引脚。
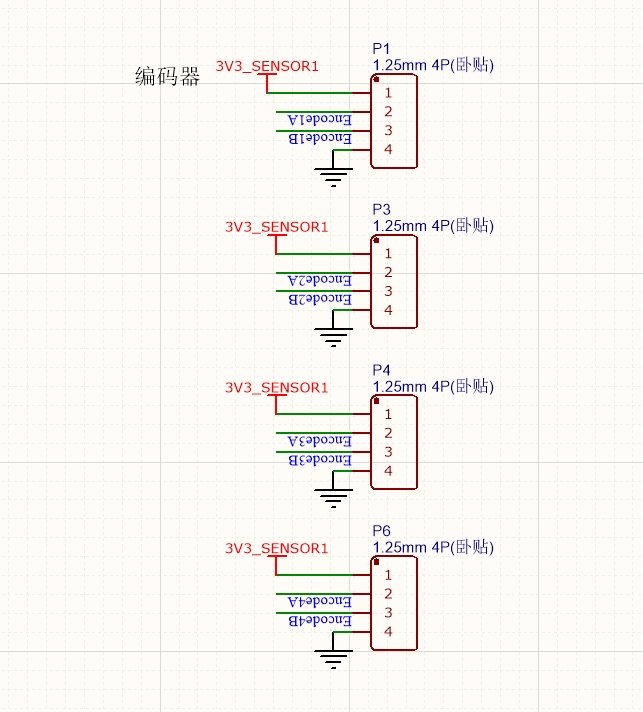
图 3-5 编码器引脚连接
3.6 OLED显示模块
该显示屏共有六个引脚,分别是:VCC为5V电源输入,GND为接地端,时钟信号输入端SCL、数据或命令信号输入引脚SDA、数据/命令选择器DC(HIGH表示输入的信号是数据信号,LOW表示输入信号为指令信号)和复位引脚RES。如图3-6所示。
图 3-6 OLED模块引脚连接
3.7 核心控制模块
在前文控制器选型中已确定该系统K66控制芯片,核心控制模块是以K66及其周围电路组成的最小系统,其中包含了电源滤波电路、复位电路、时钟电路等。核心控制模块如图3-7所示。
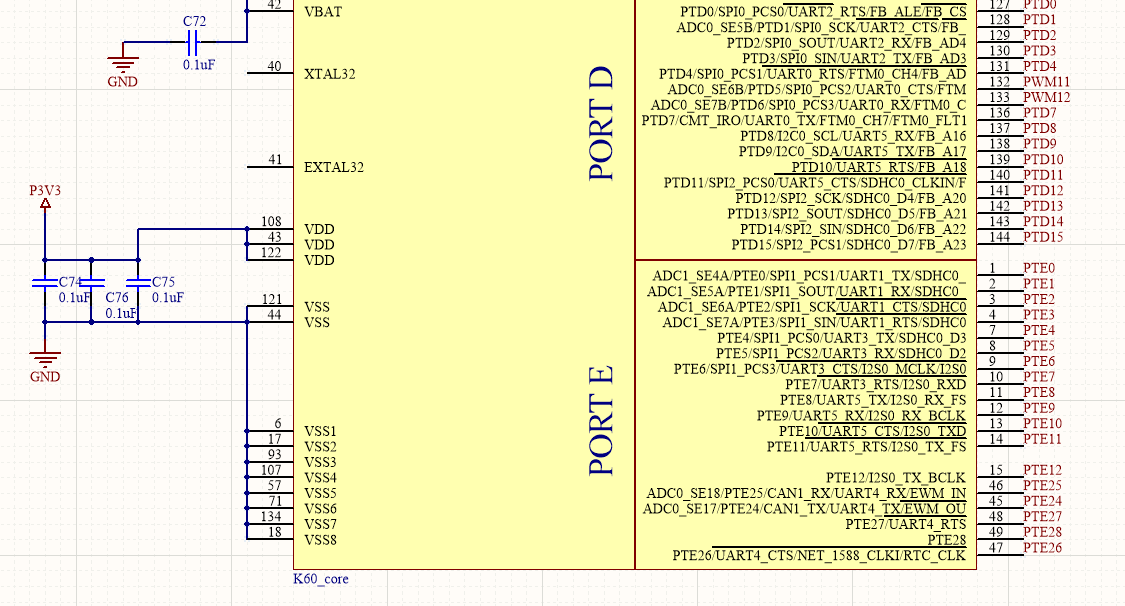
图3-7 核心控制模块(部分)
3.7.1 电源滤波电路
电源的电压并不会保持绝对恒定不变,而是随着使用时间和外部环境影响产生电压的上下波动,从而会影响系统供电,为了增加电路的稳定性,减小外部环境对系统的干扰作用,需要对电源电路进行滤波。如图3-8,将电源引脚处下拉,同时并联多个电容,从而消除电源波动影响。

图 3-8 滤波电路
3.7.2 晶振电路
电路中常见的晶振,其全程是石英晶体振荡器,它具有相当好的稳定性并且不受外部因素的干扰,因此可以生成准确的基准频率,为单片机产生必要的时钟频率。
晶振电路常在晶振常在电源和GND两端引脚处串联两个电容,如图3-9,用以消除谐振波对电路稳定性的影响。
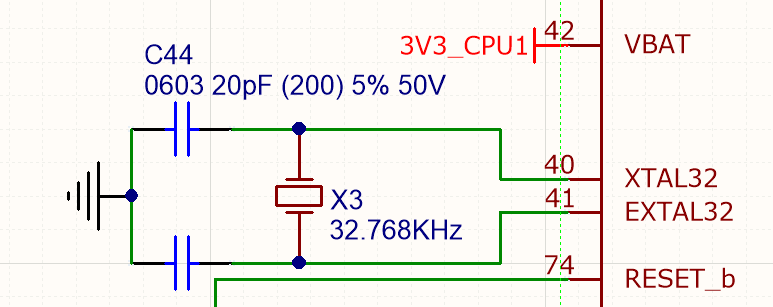
图 3-9 晶振电路
3.7.3 复位电路
为了调试方便,有时需要对单片机进行复位,复位电路对控制模块中必不可少。单片机的复位需要将复位引脚(RESET)持续2us以上的低电平,根据原理选用如图3-10复位电路。
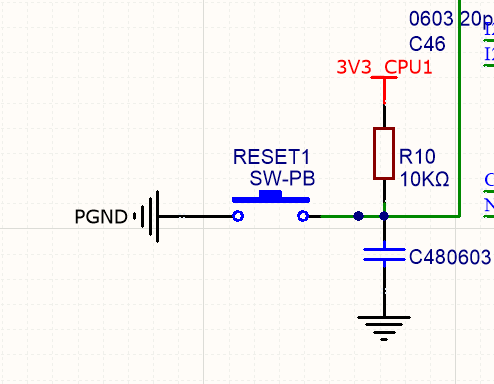
图 3-10 复位电路
3.8 智能车系统电路板的设计绘制
本课题选用Altium Designer软件来绘制智能车所需电路原理图和PCB图。由上述不同模块设计已完成各部分原理图,接下来需要对整体系统进行整合。
- 在Altium Designer软件中新建一项工程,并在工程下新建一原理图,然后在原理图中分区域将各个模块电路原理图绘制好,然后根据K66芯片引脚功能,选择每个模块的各个引脚标号将其连接,如图
- 在工程下新建PCB文件,将已完成的原理图导入PCB中,将元件合理布局,设定好不限规则,然后进行手动布线。
当PCB电路板设计完成之后,就可以制板了,电路板制成效果如图3-11。

图 3-11 制成的PCB板
3.9 电路板与各传感器的安装
车模只是一副没有灵魂的躯壳,若能够要完成各项功能,要将传感器和电路板合理的安装在车模上。
3.9.1 摄像头的安装
信标追踪智能车运行场地较大,信标随机摆放,位置较为分散,为了获取全局信息,需要将摄像头的高度适当的调高,因为高出视角较广,可以捕捉到远处信息。
但是场地环境是开放式的,外部环境干扰信号较多,提高摄像头高度的时候不仅会获得远处信标的信息,也会获得大量场地外部干扰信息。为了获得更好的视角,需要对摄像头角度进行适当的向下调整。如图3-12。
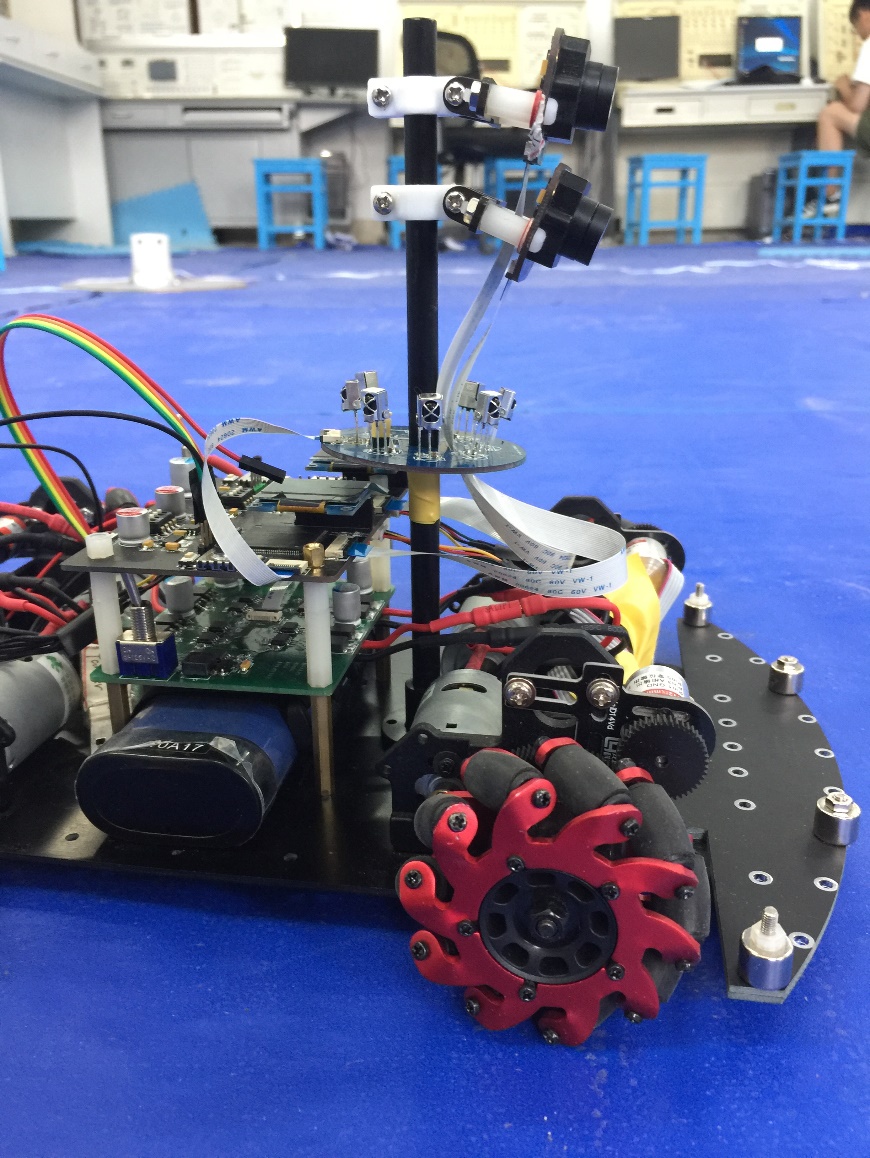
图 3-12 摄像头的安装
3.9.2 编码器的安装
编码器使用来测量电机转速的传感器,他是依靠自身的齿轮与电机的齿轮向相啮合,由电机旋转带动编码器旋转,从而测得转速。因此,编码器在安装时必须要紧密啮合于电机齿轮,如图3-13。
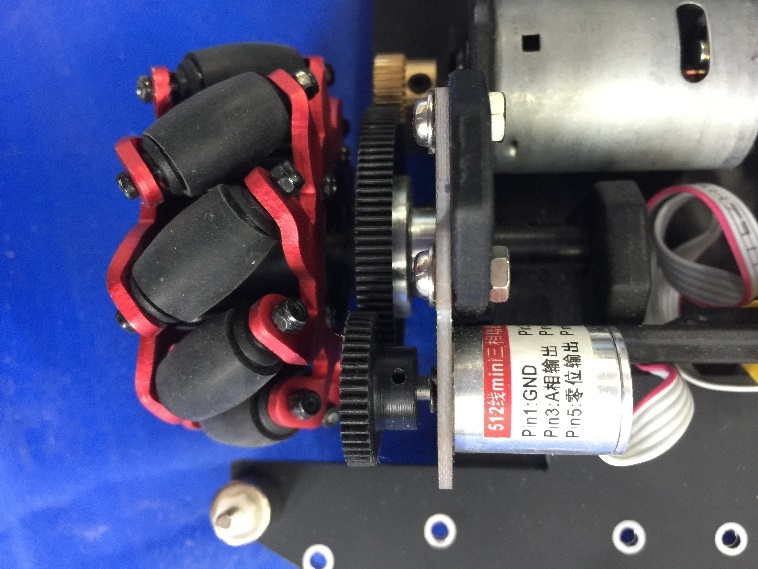
图 3-13 编码器的安装
3.9.3 磁标的安装
信标追踪智能车在发现点亮状态信标时需要向其行驶并将其熄灭,熄灭信标靠的是拥有磁性的磁标,其原理是:在信标外围有一个通电线圈,当磁体从导线旁边经过时,会发生电磁感应,信标内传感器接收到信号从而控制信标熄灭。
由此分析可得,智能车越早触发熄灭信标越好,因此磁标位置应位于智能车前端,结合实际可得磁标安装位置如图3-14。
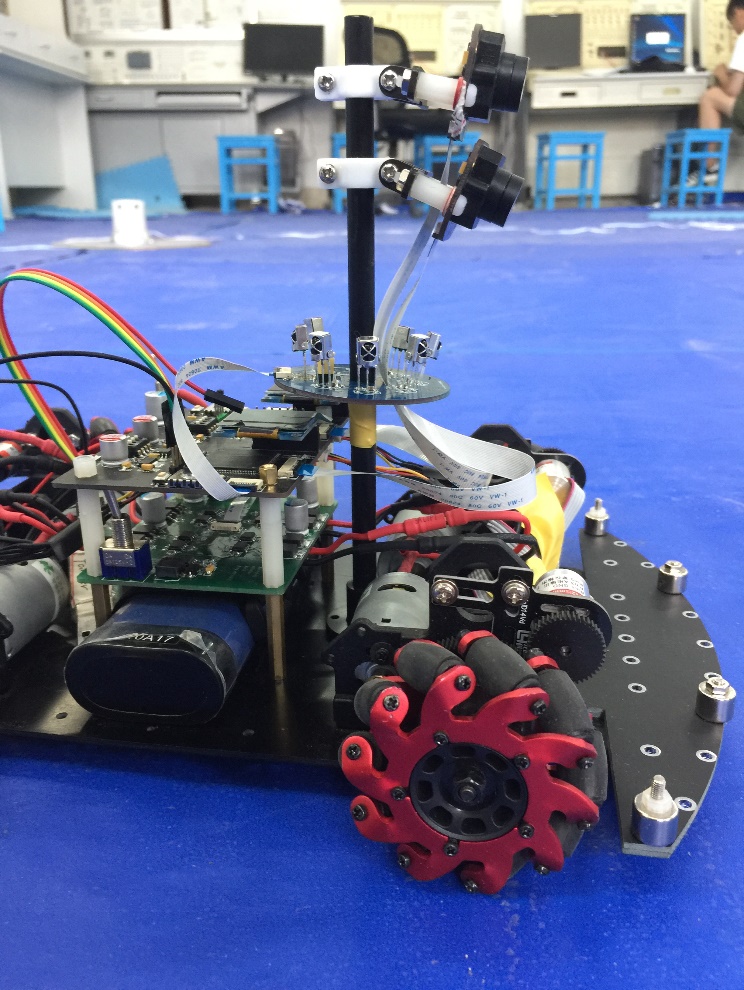
图 3-14 磁标安装
3.9.4 电路板安装
电路板上有元器件和接口端子,用以连接其他部件,插拔式的连接方式在提供了方便的同时,也会带来一些麻烦,比如在小车行驶过程中的不断震动可能会使得连接之间接触不良。另外当受到撞击时电路板上的电器信号可能会受到影响[17],为避免这些情况的发生,需要将电路板固定在合适的位置。电路板固定位置如图3-15。
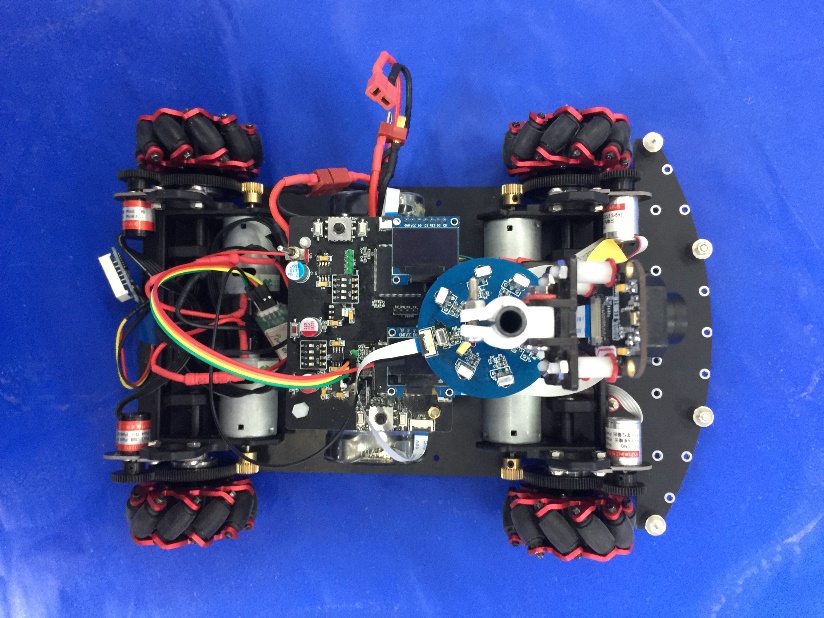
图 3-15 电路板与智能车效果图
3.10 本章小结
本章主要介绍了多传感器检测的信标追踪智能车的各部分硬件设计,包括各种传感器的原理图和引脚功能,稳压电路、复位电路等电路设计及其原理等。为了实现各模块功能,还需给出每个引脚与核心控制器的对应连线。最后通过制作PCB板将各个模块连接在一起。完成了硬件部分的基本设计。
第四章 智能车软件系统设计
4.1 智能车主程序设计与开发
如果说电路板传感器相当于智能车的身体器官,那么程序就相当于智能车的大脑及灵魂,只有合理正确的逻辑程序,才能控制智能车按照规定的目标行驶。本系统主要的任务是识别场地信息,判断信标位置并驱动智能车向点亮状态信标方向行驶,期间要避免与障碍物发生碰撞。在这一过程中包括:
- 图像的采集与处理系统;
- 点亮状态信标位置分析;
- 智能车行驶过程避障系统;
- 电机转速获取与控制系统;
主程序的流程图4-1如下:
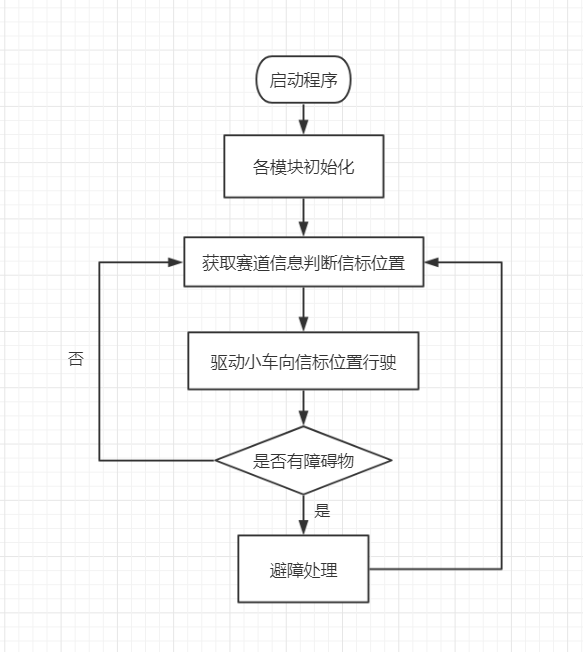
图 4-1 主程序流程图
4.2 信标位置识别程序
图像的获取和处理是该信标追踪智能车最重要的一环,无法获取图像或者无法正确的处理图像信息对智能车来说就相当于丧失了对环境的感知能力,无法确定移动方向。
4.2.1 图像采集
OOV77225的八个数据信号线一次输出八个像素,按照从左到右,从上到下的顺序依次输出,从而组成完整的图像[18]。具体图像采集思路如表4-1。
表4-1 图像采集步骤
1 | 首先当需要对图像获取时,开启场中断 |
2 | 当接收到场中断时,对DMA传输进行初始化,并且开启 DMA 的数据传输 |
3 | 每次接收到 PCLK 上升沿信号时,触发 DMA 数据传输,把图像的数据读取到内存数组里。 当触发 n 次(n=图像像素数目)后停止对 DMA 数据的传送。 |
4 | DMA 停止传输时触发中断,中断里关闭场中断,图像采集完毕, 或者等待下一个场中断来临才关闭场中断,标记图像采集完毕[19]。 |
图像采集流程图如图 4-2:
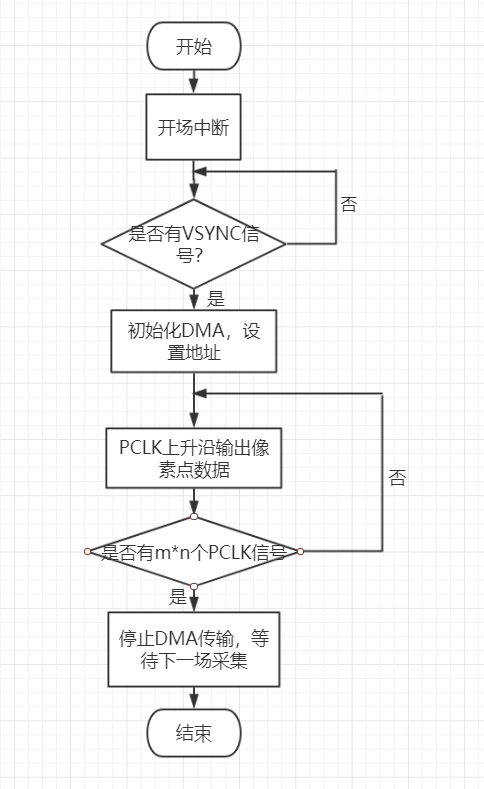
图 4-2 图像采集流程图
4.2.2 信标位置获取
通过采集到的图像可以获得场地环境信息,然后可以平均值法分析得出点亮状态信标的中心位置[20]:
- 将图像数据解压为60×80的二维数组,数组中每一位的数字1表示亮0表示灭。
- 判断每一列是否有点亮状态的点,若有,记第一次出现光亮的列为X0,记最后一次出现光亮的列为X1。
- 判断每一行是否有点亮状态的点,若有,记第一次出现光亮的行为Y0,记最后一次出现光亮的行为Y1。
- 取X0和X1的中点X记作点亮状态信标中心点的横坐标,取Y0和Y1的中点X记作点亮状态信标中心点的纵坐标。
4.2.3 图像滤波处理
由于自然光和地面、墙面反光的影响无法完全消除,因此需要对干扰信息进行处理,从而更精确测得点亮状态信标的中心位置,需要对图像进行滤波处理。图像滤波降噪最常用的处理方法有均值滤波、中值滤波和维纳滤波[21]。本系统采用综合使用均值滤波和中值滤波两种方法对图像噪音进行降噪处理。
4.3 避障系统程序
为了智能车在行驶过程中避免与熄灭状态信标或场地内其他信标车发生碰撞,需要在车身前方安装多个红外测距传感器,从而获取智能车前方的障碍物信息。在软件设计中,避障系统的逻辑较为简单也相对容易实现。
红外测距传感器左、中、右三个,记作S1、S2、S3。根据三个传感器的检测状态对障碍物方向进行判断,从而制定避障策略,如表 所示(传感器状态1表示检测到规定距离内障碍物,0表示未检测到规定距离内障碍物):
表 4-2 障碍物方位判断与避障策略
S1 | S2 | S3 | 障碍物判断 | 避障策略 |
0 | 0 | 0 | 前方无障碍物 | 不需要避障 |
1 | 0/1 | 0 | 左侧或左前方有障碍物 | 向右侧转向 |
0 | 0/1 | 1 | 右侧或右前方有障碍物 | 向左侧转向 |
1 | 0/1 | 1 | 前方有障碍物 | 停车并倒退 |
0 | 1 | 0 | 前方有障碍物 | 停车并倒退 |
4.4 电机转速PID控制程序
在控制领域,PID控制算法是运用最为广泛的一种控制规律,相比其他算法,PID原理简单,适应性强,鲁棒性强,计算量小[22],能够适应多种控制环境,如图4-3。
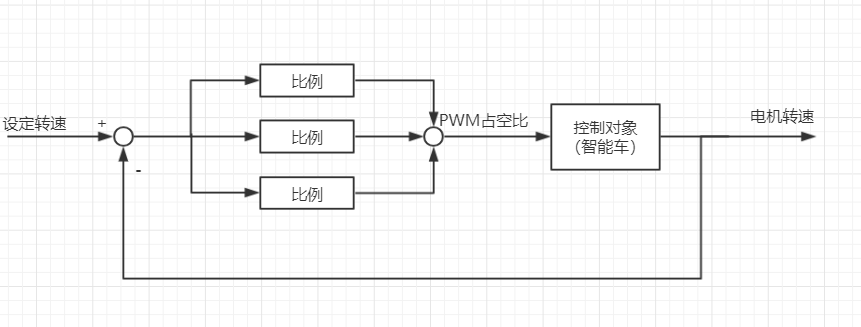
图 4-3 PID控制
4.4.1 PID控制基本原理
PID控制也叫比例积分微分控制,他是将输入与实际输出之间的差值经过比例、积分、微分之间的组合综合作为控制器的输入值,从而系统输出能够快速达到期望值[23]。其一般控制规律如式4-1所示。
(4-1)
其中,Kp为比例系数,Ti为积分系数,Td为微分系数[24]。PID算法的三个系数的调节作用如表4-3所示:
表 4-3 PID各环节作用
环节名称 | 作用 |
比例环节 | 比例环节是实现放大作用,当系统误差较大时,增加比例系数可以使偏差迅速度向减小的趋势变化。比例系数选的越大,系统调节速度越快,但比例系数过大的时候,系数输出的超调量也会增大,可能会降低系统的稳定性。 |
积分环节 | 积分环节的作用就是消除静态误差,提高控制精度。该环节的调节能力与积分系数有关,积分系数越小,积分环节越强,积分系数越大,积分环节越弱。积分环节的引入可能造成系统动态性能变差。 |
微分环节 | 能够预测误差的变化规律,反映系统偏差的变化规律,但是如果微分时间的常数过大,系统的稳定性也会受到影响,此时系统的鲁棒性难以保证,引入微分作用,主要是使控制系统的稳定性更加稳定,并且其调节速度更快,从滤波角度看,微分作用实际上相当于是一个高通滤波器,所以对噪声的干扰有一定的放大作用[25]。 |
4.4.2 智能车电机的PID控制
信标引导智能车在发现点亮状态信标时需要迅速转向至信标中心位置所在方向,而在熄灭信标之后也需迅速调整智能车姿态使其转向下一个信标的方向。H车模的转向是依靠电机差速完成的,所以为了更加迅速的控制电机转速达到目标值,使智能车快速转向目标信标方向,可以使用PID控制算法进行控制。
该系统中,对智能车电机转速的控制是通过PWM信号的占空比来控制的。将占空比作为变量引入PID控制策略中,使测得的转速能够快速达到目标转速并保持较小动态误差[26]。
4.4 本章总结
本章首先介绍了多传感器检测的信标追踪智能车系统主程序流程,给出了该智能车行驶过程中的主要逻辑判断,然后分别详细介绍了各个模块如图像识别、避障等程序实现,同时分析了例如信标位置判断、电机PID调速的算法原理,从而综合达到对该智能车的控制效果。
第五章 系统调试
5.1 智能车运行场地环境搭建
根据信标智能车需要完成的任务要求,该智能车需要在特定场地内完成信标追踪任务。为了更好的模拟任务要求的环境,需要搭建5*7米的蓝色背景区域,并在该区域内随机固定放置信标系统,同时在实验室内不可做遮光处理。场地环境如图5-1所示。
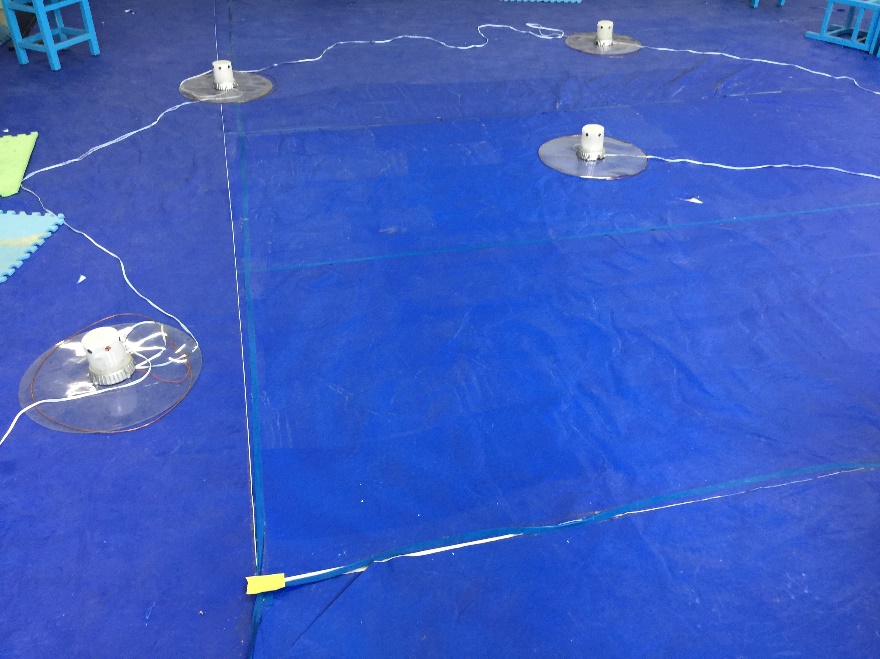
图 5-1 信标场地
5.2 各模块功能调试
对智能车的调试任务不能一蹴而就,首先需要对各个模块进行调试,等每个模块都调试完成受再进行整车调试。
5.2.1 信标定位系统调试
在蓝色场地环境内,启动信标系统,将摄像头面向信标位置左右晃动,查看输出的信标方向与实际是否相同。改变不同距离、日光条件,重复上述实验,检查位置输出是否正确,如图5-2。
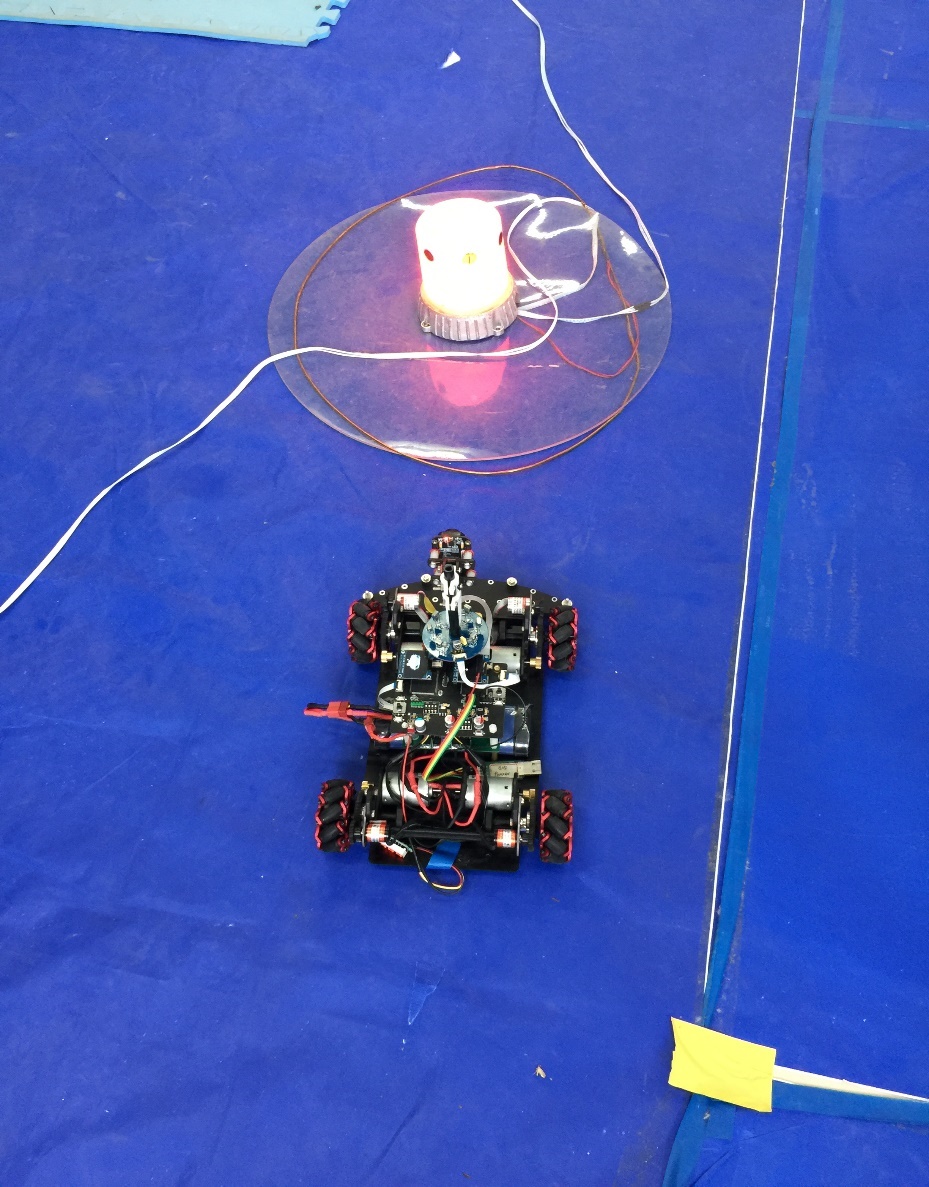
图 5-2 图像采集及定位功能调试
实验结果发现,在较暗的日光环境中,可以输出较为准确的信标方向信息,但是在日光较强的环境下,由于日光中包含大量的红外光,会对信标定位产生较强的影响。解决方案如下:
- 改变摄像头阈值:程序中改变摄像头的阈值可以降低摄像头的感光强度,从而消除日光的影响,但是降低阈值的同时也会使摄像头对点亮状态的信标检测能力降低。结合以上原因,该程序将阈值设为与日光强度负相关的参数,这样可以自动控制不同光照下的阈值,从而使得系统可以更加准确定位信标位置。
- 平均值滤波:由于图像中影响信标位置判断的噪点大多都是随机位置出现的,因此使用平均值滤波的方法,可以使得噪点对图像的影响相互抵消。
不同阈值条件下图像检测结果如图5-3和图5-4。
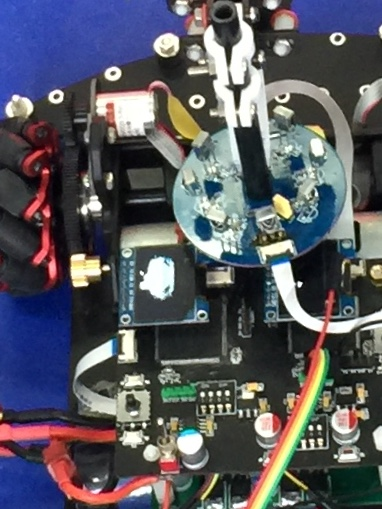
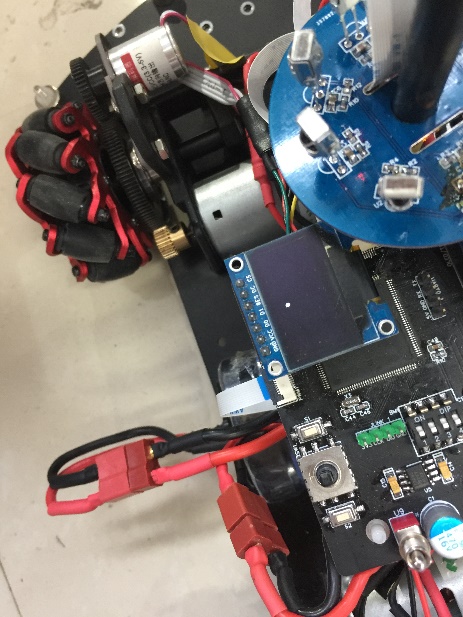
图 5-3 阈值为100时图像检测 图5-4 阈值为15时图像检测
5.2.2 避障系统调试
在场地环境内,随机摆放多个障碍物。设定避障策略和避障距离后,将智能车放置于场地内并程序设定没有障碍物时直行,使其向障碍物方向行驶,观察避障效果,如图5-5。调整参数控制小车运行速度和避障距离,多次重复该实验。
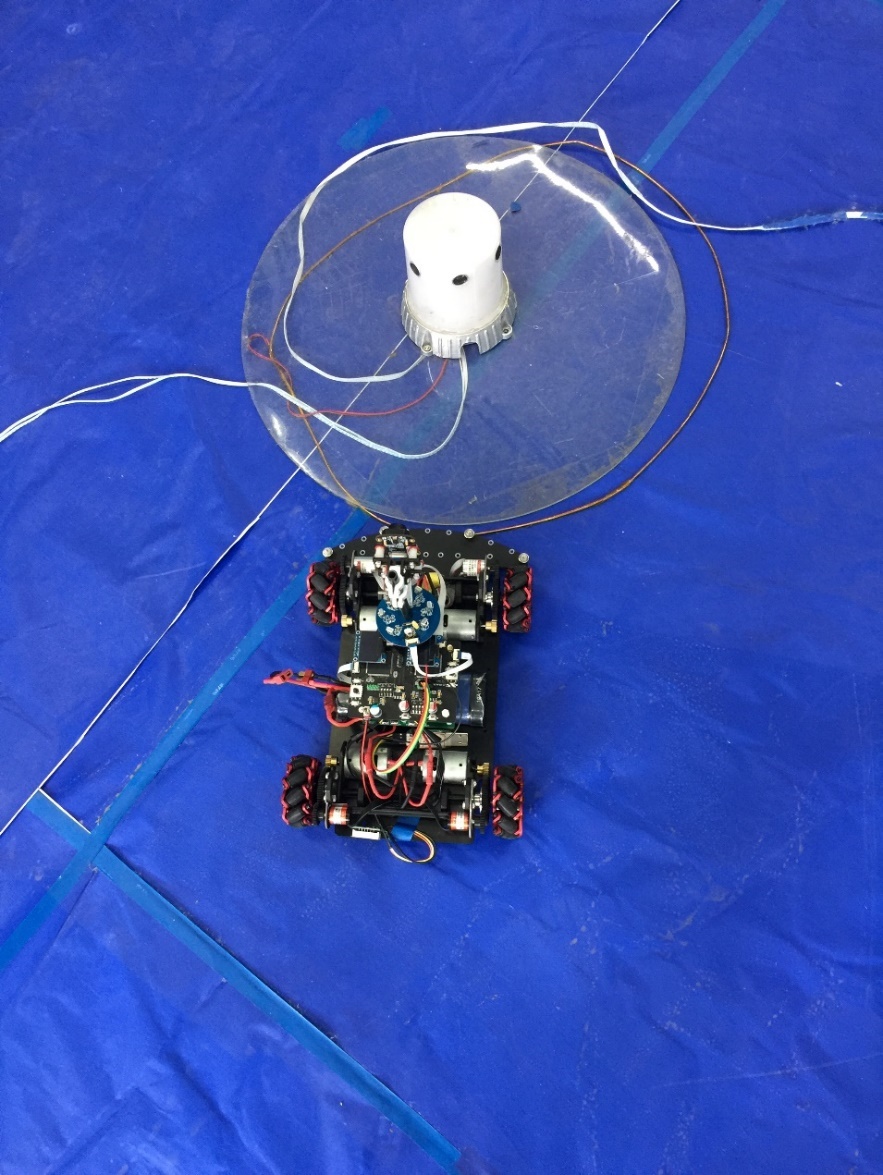
图 6-5 智能车避障功能调试
由实验结果发现,在相同运行速度下,避障距离越大小车越难撞击到障碍物,实验数据如表5-1。考虑到避障较早会使智能车反应过于敏感,而避障较晚却有撞到障碍物的风险,综合以上因素,设定避障距离为15cm。
表 5-1 避障测试
5cm | 10cm | 15cm | |
1 m/s | 避障成功 | 避障成功 | 避障成功 |
2 m/s | 避障失败 | 避障成功 | 避障成功 |
3 m/s | 避障失败 | 避障失败 | 避障成功 |
同时实验发现若智能车运行过程中意外撞到可能会造成电机堵转小车无法继续运动,因此为了以防万一,在程序中加入电机堵转后倒车重新启动的程序。
第六章 总结与展望
6.1 系统实施及其影响
在该智能车设计过程中,本文综合考虑了经济、安全、环保等个各方面因素的影响,在传感器等模块选型时,对比常见不同类型和型号传感器,比较价格和性能,综合确定选型,在保证功能的前提下最大的降低了成本。
该智能车设计方案给特定功能智能车任务的实现提供了思路,将多种传感器相融合,综合判断智能车周边环境和运行情况,进而根据环境控制智能车行驶。本文的研究为我校智能车比赛发展奠定了基础,促进了大家对智能车的认识和兴趣。
6.2 总结
本文对多传感器检测的信标追踪智能车系统设计做了完整的分析,从对该智能车系统需要完成的任务分析,到各功能模块的设计,再到对传感器及其他硬件选型和电路设计、软件方面的逻辑分析和程序设计,最后对智能车的结构设计和安装。完成对整个智能车的设计与组装后,分模块对各个功能进行调试,经过大量的实现和参数修改,最终该智能车系统可以很好的完成目标任务。
本文所设计的方案为智能车对特定目标追踪提供了思路,但还是有一些不足需要改进,
(1)在信标追踪过程中的最佳路径选择没能很好的实现,这样降低了信标追踪的效率,路径规划算法有待优化;
(2)在对图像的处理过程无法处理超强光环境下的图像;
随着人们对智能车认识的逐步深入,越来越多的人投入到智能车的相关研发中,相信现在相关领域存在的问题将会很快得到解决。
参考文献
[1]徐友春,章永进,王肖,舒飞.智能车的研究现状与发展趋势[A].中国智能交通协会.第六届中国智能交通年会暨第七届国际节能与新能源汽车创新发展论坛论文集(上册)——智能交通[C].中国智能交通协会:中国智能交通协会,2011:6.
[2]洪长志,刘运银,刘帅.基于S12的运动轨迹采集及处理的研究[J].科技风,2010(06):168-169.
[3]岳喜斌. 基于深度学习的智能车场景解析算法研究[D].北京林业大学,2016.
[4]姜允侃.无人驾驶汽车的发展现状及展望[J].微型电脑应用,2019,35(05):60-64.
[5]方正川. 自主寻径及避障智能车的研究与实现[D].安徽工程大学,2017
[6]彭刚,陈轩,何顶新,秦肖臻.国内智能车比赛现状综述[J].可编程控制器与工厂自动化,2012(11):31-35.
[7]张鹏,宋成,陈璐寒.基于信标灯检测的智能小车设计[J].通讯世界,2016(22):299.
[8]翁亚滨.电子图像处理中智能化识别技术的应用[J].计算机产品与流通,2019(05):143-144.
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


