无传感器运行的异步电机转子电阻辨识技术研究毕业论文
2020-04-15 21:43:00
摘 要
电动机是现代社会生活、工业生产和国防军事中的主要动力设备,三相交流异步电机具有结构简单、运行可靠、价格便宜等优点,在国内外被广泛应用于各个领域。感应电机的矢量控制或磁场定向控制(FOC)可以提取高性能并提供快速的动态响应。但需要提供精确的电机参数。然而在无传感器运行时,电机参数不能直接测量获得,因此需要采取一定方法进行估计运算。本文介绍了基于模型自适应的转子电阻辨识方法。
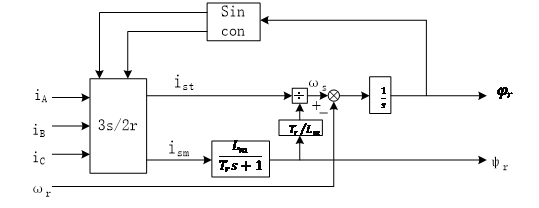
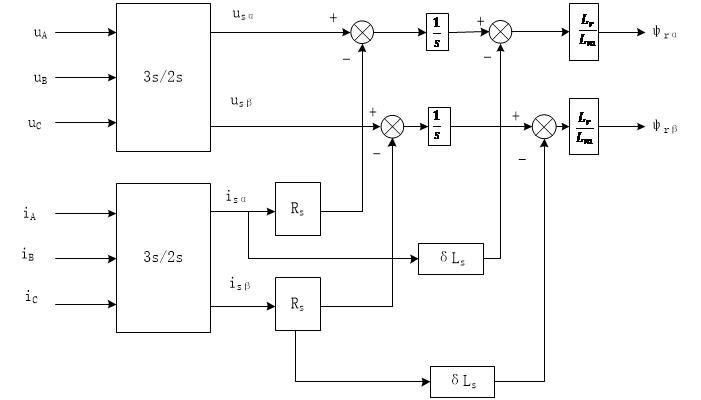
系统阐述异步电机坐标变换(3S/2r)的手段,介绍了矢量控制的方法,并对转子磁场定向方式下的矢量控制作了简要介绍,介绍了磁链观测的两个模型,并给出了模型框图,着重分析了转子电阻偏差对矢量控制系统性能的影响。
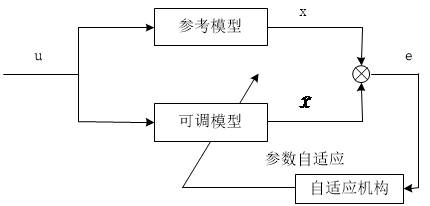
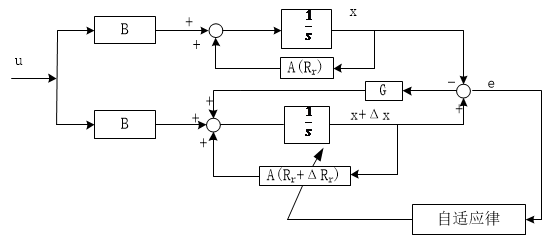
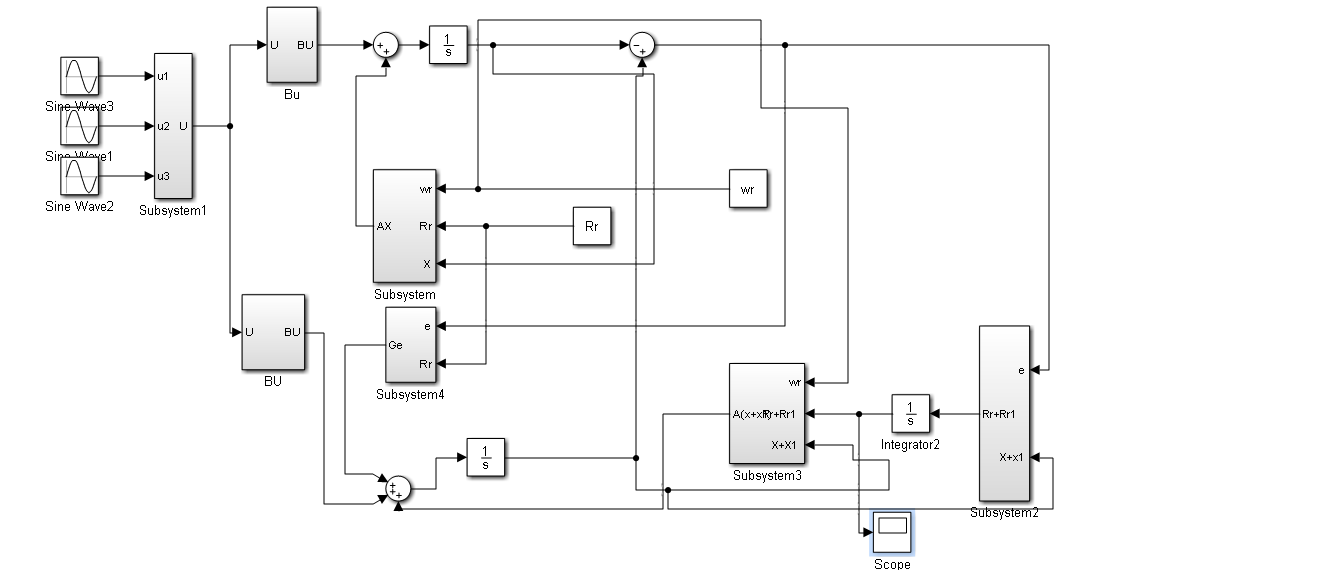
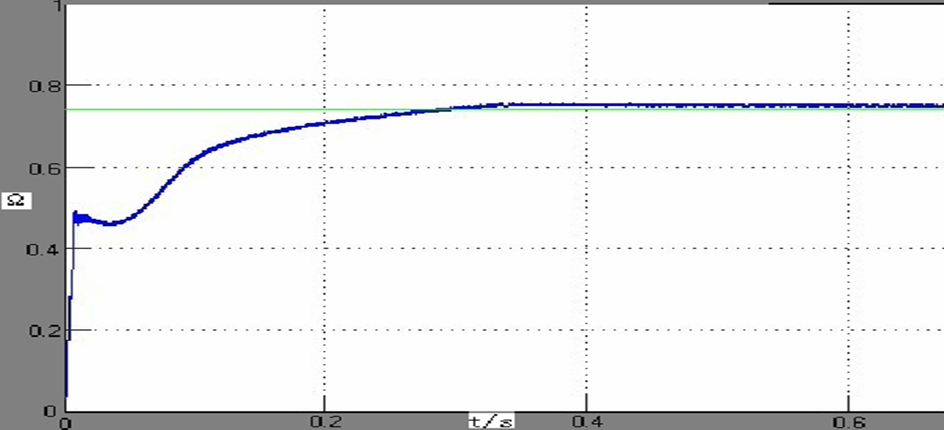
简要介绍了模型自适应的基本原理,根据异步电机的状态方程,基于李雅普诺夫函数的方法设计了转子电阻辨识的自适应律,并给出了转子电阻辨识方案框图。最后根据提出的辨识方案的数学模型用Simulink搭建了仿真模型,并验证了方案的可行性。
关键词:异步电机 矢量控制 无传感器运行 自适应控制 磁场定向技术 磁链观测
Research on Rotor Resistance Identification Technology of Sensorless Asynchronous Motor
ABSTRACT
Three-phase AC asynchronous motor has the advantages of simple structure, reliable operation and low price, and is widely used in various fields at home and abroad as the main power equipment. Vector control or field oriented control (FOC) of induction motors can extract high performance and provide fast dynamic response. But precise motor parameters need to be provided. However, in Sensorless operation, motor parameters can not be measured directly, so it is necessary to adopt certain methods to estimate. A model of adaptive rotor resistance identification method is presented in this paper.
The mathematical model of asynchronous motor in three-phase coordinate axis is transformed into two-phase static coordinate axis and two-phase coordinate axis respectively. The basic method and principle of rotating coordinate axis are introduced. The basic principle of vector control and the vector control system based on rotor field orientation are introduced. Two models of flux linkage observation are introduced. The model block diagram is given in paper. The influence of the rotor resistance variation on the performance of the vector control system is strongly analysed.
The basic principle of model adaptation is briefly introduced. According to the state equation of asynchronous motor, the adaptive law of rotor resistance identification is designed based on Lyapunov function, and the block diagram of rotor resistance identification scheme is given. Finally, a simulation model is built with Simulink according to the mathematical model of the proposed identification scheme, and the feasibility of the scheme is verified..
Key words: induction motor ;vector control; sensorless operation;adaptive control; Flux linkage observation
目录
摘 要 I
ABSTRACT II
第一章 引言 1
1.1 课题研究背景及意义 1
1.2 异步电机转子电阻辨识综述 2
1.2.2 卡尔曼滤波法 3
1.2.3 模型参考自适应法 4
1.2.4 人工智能方法 4
1.3论文研究的主要内容及章节安排 5
第二章 矢量控制的基本原理 6
2.1 异步电机在三相静止坐标轴系的数学模型 6
2.2 坐标变换 10
2.2.1 三相—二相变换(3S/2S变换) 10
2.2.2 二相(静止)—二相(旋转)变换(2S/2r) 11
2.3 三相异步电机在二相坐标轴上的数学模型 11
2.3.1任意旋转的坐标轴系上的数学模型 12
2.3.2静止轴系下的模型 13
2.4 基于转子磁场定向矢量控制的基本原理 13
2.4.1磁场定向矢量控制技术的原理 13
2.4.2基于转子磁场定向的矢量控制原理 14
2.5 本章小结 15
第三章 基于模型参考自适应的转子电阻辨识 16
3.1转子磁链观测器 16
3.1.1 转子磁链的电流模型 16
3.1.2 转子磁链的电压 18
3.2 转子电阻变化对矢量控制的影响 19
3.3 模型参考自适应的基本原理 20
3.3.1模型参考自适应系统 20
3.3.2基于Lyapunov稳定性理论自适应律的设计 21
3.4 基于模型参考自适应的转子电阻辨识 23
3.4.1异步电机动态误差模型 23
3.4.2 基于MRAS的转子电阻在线辨识算法 24
3.5本章小结 27
第四章 仿真分析 28
4.1 仿真模型的建立 28
4.2仿真实验分析 29
4.3本章小结 30
总结与展望 31
参考文献 32
致谢 33
第一章 引言
1.1 课题研究背景及意义
根据工作方式和驱动原理的不同,旋转电机可分为电动机和发电机两类,二者在结构上并无区别,但工作方式和应用领域不同。发电机在电厂中用作生产电能的主要设备。电动机则作为电力传动系统中的动力设备,普遍应用于日常生活、工业生产和国防军事中。发电厂输出的大部分的能量都用来驱动电动机,由此可见,现代社会对电气设备的依赖程度非常高。电动机有直流电动机和交流电动机两大类。相较于交流电动机,前者在构造上要繁琐得多,但容易控制。但是在现实中,一般工业用电都是交流电。而且直流电机需要换向器,换向器制造复杂、成本高,且要经常维护,这就使得直流电机在工业控制中使用有很大的局限性。感应电动机的固有优点是结构简单,体积小,运行可靠,坚固耐用等,并且适用于恶劣环境,因此在国内外被广泛应用于各个行业。
随着电机的广泛应用,对电机控制的要求也越来越高。电机控制是指对电机的转向、转速、启停进行控制。其中调速控制又是是电机控制的重点,传统的控制系统中需要用到速度传感器测量获得电机的转速,再通过控制器调整控制使其转速稳定。然而,速度传感器显示其价格昂贵,尤其是在低功率应用中,通常在这种应用中,传感器的成本高于机器本身。此外,将此类传感器连接到基础设备上可能会影响整体安装的刚度。为了克服这些缺点,人们研究了一种无传感器控制技术,无传感器感应电动机控制技术已越来越引起人们的关注。迄今,无传感器控制系统已成为电机控制研究的热点[1]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


