GPS和陀螺仪的无线数据采集(软件设计)毕业论文
2020-04-18 19:40:37
摘 要
作为一种被大范围使用的传感器,电子陀螺仪在涉及工业商业自动化,导航通信,航空航海等方面,对于设备的精确测量与控制成为必不可少的部分。随着电子工业的不断发展与升级,微型传感器的体积与功耗都在不断减小,运算能力以及可扩展性却在不断提升。
GPS全球定位系统是全球使用最广泛的系统之一。在人们出行中,GPS定位导航已经越来越重要。在室内、树林、立交桥等一些地势复杂或有障碍物的场景中,GPS的定位信号往往不精确甚至无法定位,这时就需要用到陀螺仪进行辅助导航。通过GPS 陀螺仪两者形成惯性导航系统,可以大大提高导航精度。
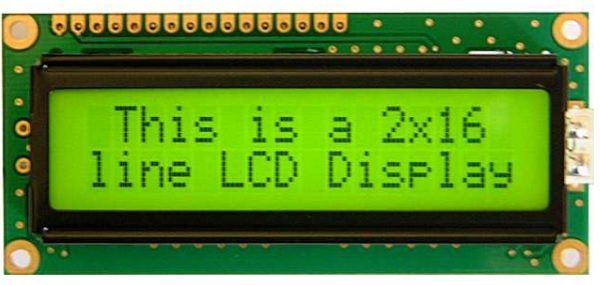
本课题设计了GPS 陀螺仪的数据的无线采集,基于陀螺仪和GPS的基本原理,将导航数据进行分析并最终显示出来。所采用的硬件有意法集团生产的STMF103ZET6单片机作为微控制器,陀螺仪选用MPU6050,GPS选用ATGM336H-5N,通过无线模块NRF24L01,将数据显示在LCD1602显示屏上。
关键词:GPS定位 陀螺仪 无线传输 惯性导航 数据采集
GPS And Gyroscope Wireless Data Acquisition (software)
Abstract
As a sensor widely used, electronic gyroscope has become an indispensable part for accurate measurement and control of equipment in the fields of industrial and commercial automation, navigation and communication, aviation and navigation, etc. With the continuous development and upgrading of the electronic industry, the volume and power consumption of micro-sensors are decreasing, while the computing ability and scalability are increasing.
GPS global positioning system is one of the most widely used systems in the world. Nowadays, people use GPS more and more frequently. In the indoor, forest, overpass and other complex terrain or obstacle scenarios, GPS positioning signals are often inaccurate or even unable to locate, so gyroscopes are needed to assist navigation. The inertial navigation system formed by GPS and gyroscope can greatly improve the navigation accuracy.
This topic designs the wireless data acquisition of GPS and gyroscope. Based on the principles of gyroscope and GPS, the navigation data are accurately analyzed and finally displayed. The hardware adopted is STMF103ZET6 MCU produced by France Group as microcontroller, MPU6050 as gyroscope, ATL-NEO-6M as GPS, and NRF24L01 as wireless module. The data are displayed on LCD1602 display screen.
Keywords:GPS location; Gyroscope; Wireless data transmission; inertial navigation;data acquisition
目录
摘要 I
Abstract II
第一章 绪论 1
1.1 设计背景 1
1.2 相关技术发展现状 1
1.3 硬件模块的选取 1
1.4 软件实现 4
1.5 课题内容结构 4
第二章 陀螺仪的数据采集 6
2.1 模块介绍 6
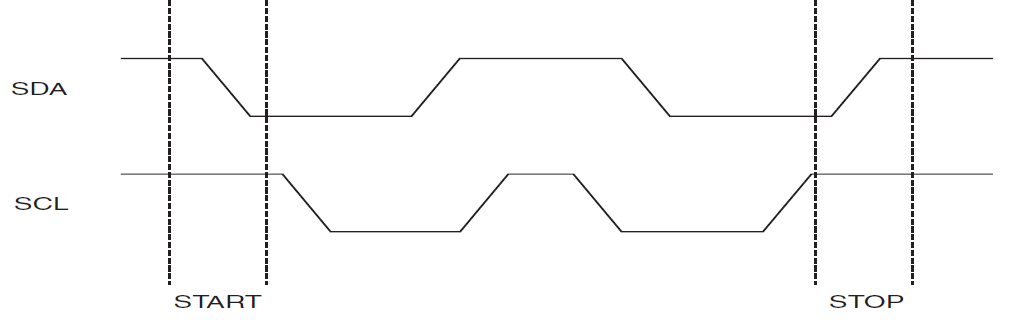
2.2 IIC通信协议 8
2.3 电子陀螺仪数据读取原理 10
2.4 数据分析与处理 11
2.5 相关程序实现 13
第三章 GPS的数据采集 14
3.1 模块介绍 14
3.2 通信协议 15
3.2.1 NMEA-0183协议 15
3.2.2 UBX配置协议 16
3.3 相关程序实现 16
第四章 无线通信的软件实现 19
4.1 模块介绍 19
4.2 SPI通信协议 20
4.3 传输原理 20
4.4 无线数据传输的软件实现 21
第五章 数据显示和程序整体结构 25
5.1 模块介绍 25
5.2 数据处理与显示 26
5.3 程序总体结构 28
5.3.1 发送端 29
5.3.2 接收端 30
5.4 总体实现效果 33
总结和展望 34
参考文献 36
致谢 37
第一章 绪论
1.1 设计背景
将不同的导航设备结合起来,发挥各自优势,形成互补,从而为用户获得更精确的位置信息,这就是组合导航系统。其中,INS/GPS惯性导航系统是众多组合导航方式中最具代表性的一种。它基于GPS卫星导航系统和惯性导航系统组成。惯性导航技术主要特点有自成系统、不对外发射和接受信号,是很大程度上可避免外界的干扰自主导航系统,传感器方面通常由陀螺仪和加速度计组成,并且基于最适合的估算法——kalman滤波算法,将其他的算法结合在一起,解算成更优的结果。
1.2 相关技术发展现状
17世纪,牛顿通过研究高速旋转刚体的力学问题,提出牛顿第一定律即惯性定律,这从而也奠定了惯性导航的理论基础。后经过傅科、舒勒等一代代科学家的努力,惯性导航技术越来越成熟。如今在控制方面,军用或者民用的飞行器大多都具有自动驾驶功能,而实现自动驾驶和对飞行器的自动控制必须通过对飞行器航行姿态的采集以及数据的分析来控制。目前的研究状况是欧美等国的通用航空产业技术技术成熟,在上世纪就实现类数据的采集存储,通讯导航一体的综合杭电设备。随着设备的集成化和微型化,姿态的采集与控制装置应用于更多的领域,但总体上,综合的采集处理设备与航电设备在实现原理有着高度联系。
1.3 硬件模块的选取
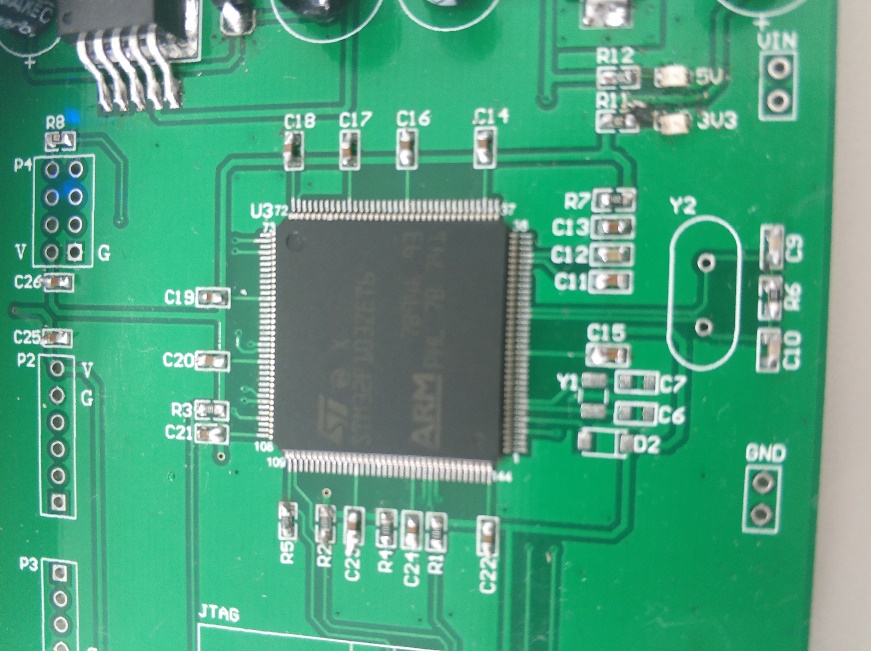
- 单片机MCU的选取
本次课题选用的单片机控制芯片型号为STM32F103ZET6,由意法集团制造,它的内核是ARM Cortex-M3,主频为72MHZ,有512KB的FLASH,64KB的RAM,具有112个通用IO口,8个16位定时器,3个SPI串行外设接口,2个IIC接口,5个U(S)ART,可以有效准确高效率地完成传感器的获取和数据的无线传输和处理。如图所示:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:





课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


