两轮自平衡车系统设计毕业论文
2020-04-22 19:35:39
摘 要
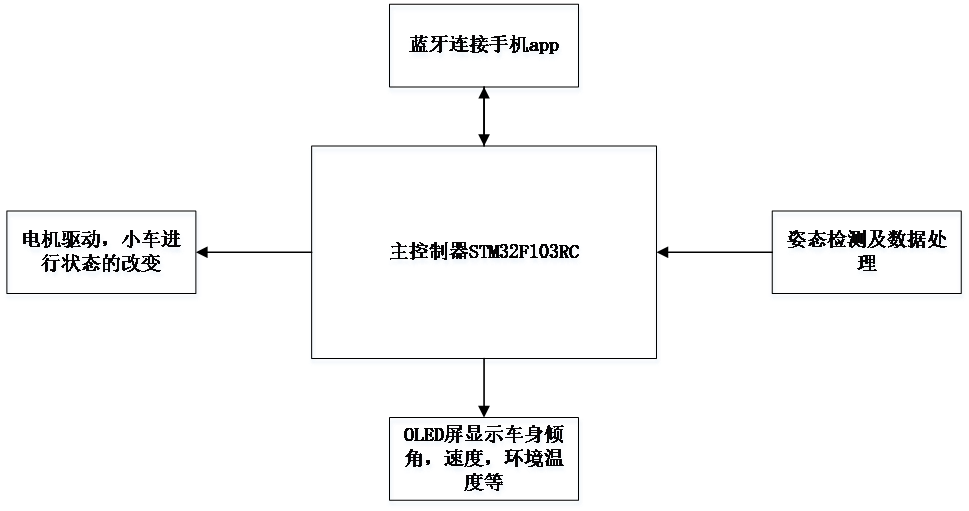
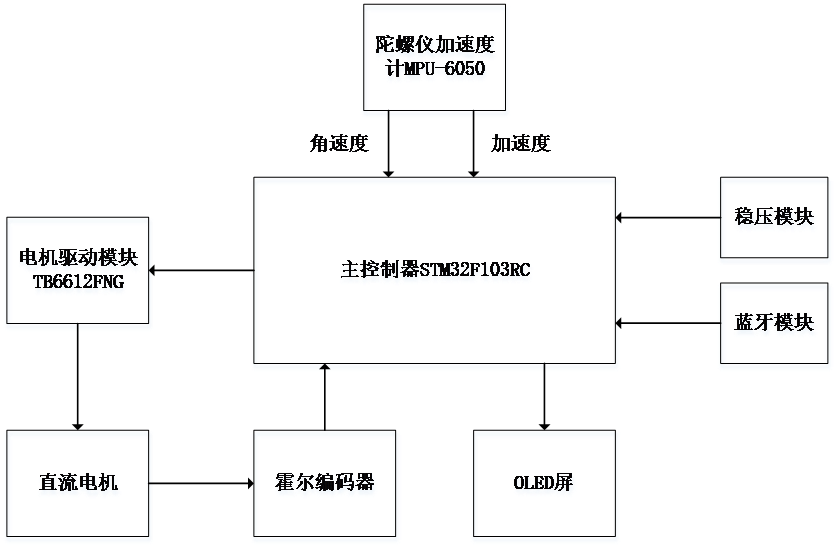
两轮自平衡小车作为现代的一种代步工具,正逐渐广泛应用于生活与军事上。因其携带方便、操作简单的优势得到了大众的青睐。两轮自平衡小车本质上具有不稳定的性质,也可以将它看作为倒立摆模型。本文提出了一种两轮自平衡小车的设计方案,该设计中最主要的部分为主控制器部分,首先选择适当的单片机作为基础,对之后在该平台上建立整体模块有着极大的帮助,所以我选择了STM32F103RC单片机,它具有32位的RISC内核,能够实现高效化。该单片机自带加速度陀螺仪传感器MPU-6050,将其作为姿态检测的一环,但由于存在误差,所以设计中会选择用数据滤波算法,将所得数据融合处理来得到更精确的估计值。然后利用PID控制算法,在控制小车平衡的同时,控制两个直流电机存在转速差以实现小车转向。
完成小车设计后可以实现小车的直立、平衡、行走,还可通过蓝牙传输指令,使得小车执行指令上的路径。
关键词:两轮自平衡小车,单片机,传感器,滤波,控制算法。
Abstract
Two-wheeled self-balancing car is gradually widely used in life and military as a modern walking tool. Because it can carries things or people easily,and also operates conveniently, it has been favored by the public. The two-wheeled self-balancing vehicle is a highly unstable two-wheeled robot. Like the traditional inverted pendulum, instability is the essential characteristic of the two-wheeled self-balancing vehicle. In this paper, a design scheme of two-wheeled self-balancing car is presented. The car uses STM32F103RC, a 32-bit microcontroller produced by ST Company, as its main controller, and uses its own gravity acceleration gyroscope sensor MPU-6050 to detect the attitude of the car. We can use Data filtering algorithm to consolidate the resulting data to get a more accurate estimate. Then, we can use the PID control algorithm, while controlling the balance of the car, the two DC motors are controlled to have a rotational speed difference to realize the steering of the trolley.After completing the design of the car, the car can be upright, balanced and walking. It can also transmit instructions through Bluetooth, so that the car can execute the path on the instructions.
Key words: two-wheeled self-balancing car,single-chip microprocessor, sensor,filter algorithm,PID control algorithm.
目录
摘要 I
Abstract II
第一章 绪论 1
1.1 课题的研究背景及意义 1
1.2 课题的研究现状 1
1.2.1 课题的国内研究现状 1
1.2.2 课题的国外研究现状 2
1.3 课题设计的主要内容及目标 4
1.4 论文的结构安排 5
第二章 小车的系统方案及关键技术 7
2.1 课题的系统方案 7
2.1.1 控制系统的内容分析及目标 7
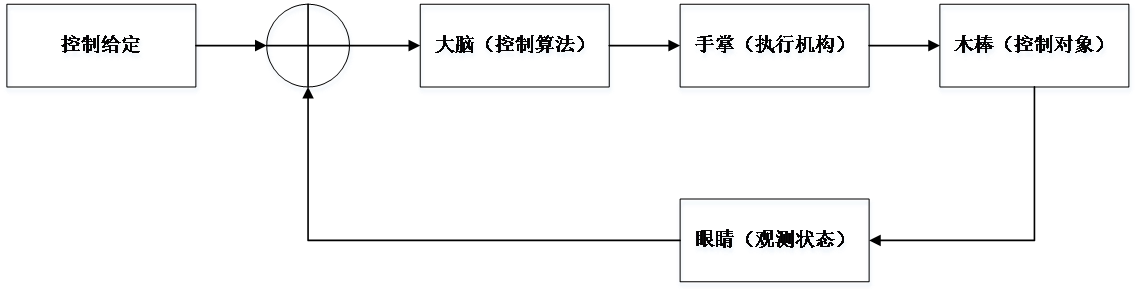
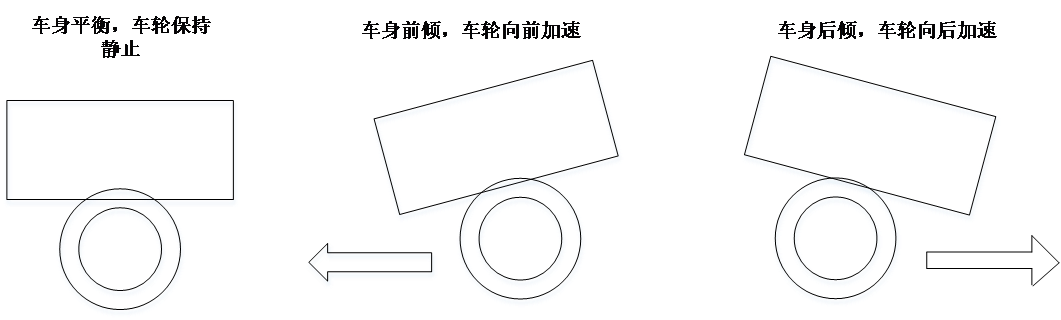
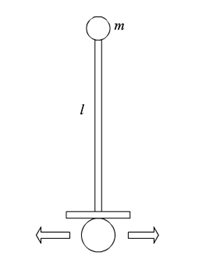
2.1.2 平衡控制原理分析 8
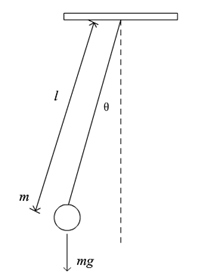
2.1.3 小车数学模型 9
2.1.4 编码器原理 10
2.1.5 PID控制原理 10
2.2课题所应用的关键技术 11
2.2.1 系统设计 11
2.2.2 数学建模 11
2.2.3 姿态检测系统 11
2.2.4 控制算法 12
第三章 课题的硬件系统设计 13
3.1 STM32F103RC单片机最小系统 13
3.2 精密电阻电池电压测量模块 14
3.3 稳压模块 15
3.3.1 LM2596T-5V芯片简介 15
3.3.2 AMS1117芯片简介 16
3.4 车身姿态检测模块 17
3.4.1 加速度测量 18
3.4.2 陀螺仪 22
3.5 编码器 23
3.6 电机驱动模块 24
第四章 课题的软件系统设计 27
4.1 姿态检测模块的软件设计 28
4.1.1陀螺仪与加速度计输出值转换 28
4.1.2 卡尔曼滤波算法 29
4.2 PID控制系统的软件设计 32
第五章 总结与反思 37
参考文献 39
致 谢 41
附录 43
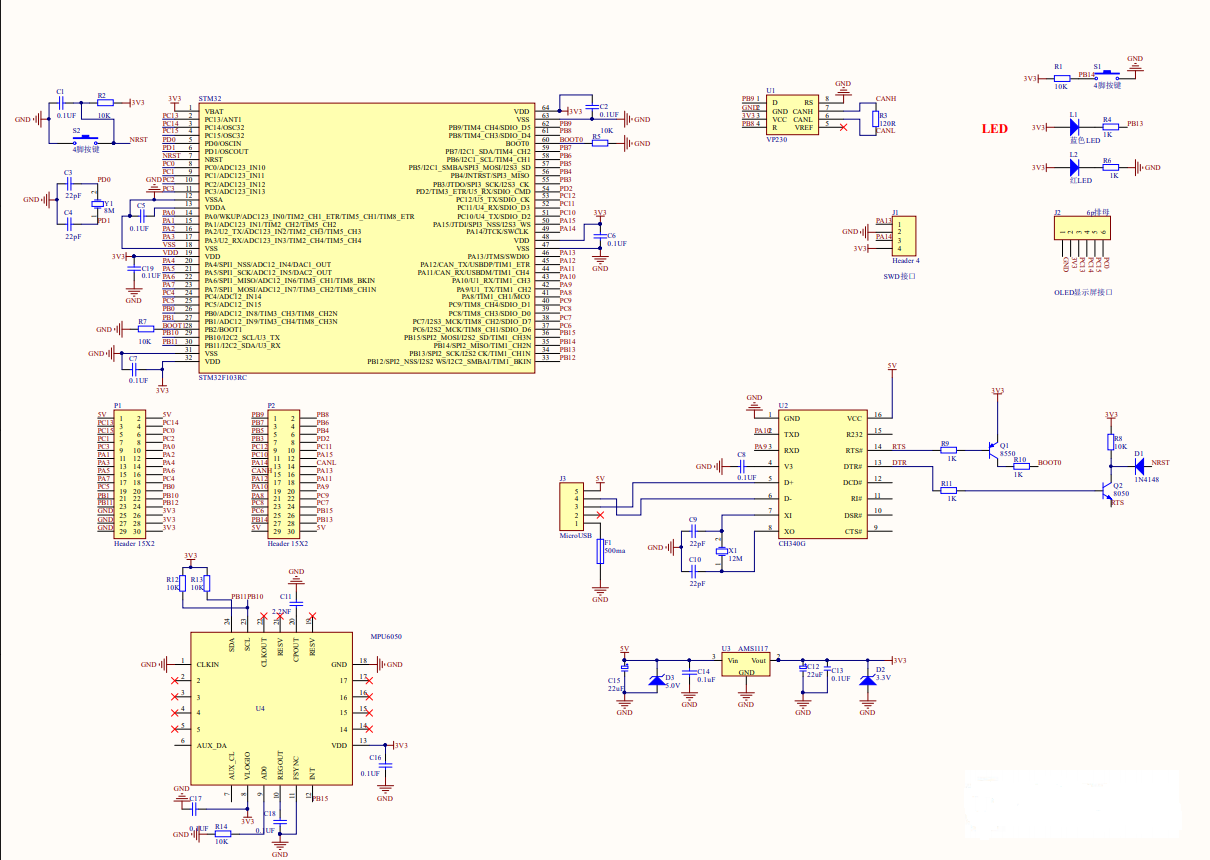
附录A 系统硬件原理图 43
附录B 系统源程序 44
绪论
1.1 课题的研究背景及意义
新型运输方式正在逐渐引起人们的注意。 2008年北京奥运会上使用的两轮平衡车大放异彩,博得人们的眼球。凭借以电池为动力,能源清洁,携带方便,灵活新颖,群众逐渐青睐于它。移动机器人是一个综合系统,它能够将环境意识,动态平衡,控制运行集合在一起。大约从1960年代开始,研究已经发现的移动机器人包括腿式、爬行式、蠕动式以及游动式机器人等,它们之间存在着移动模式的不同。移动机器人之所以能够发展的如此快速,是因为其应用范围逐渐扩大;同时也因为它所涉及的相关技术的发展所取得的巨大进步,如控制算法等。所以现在大家非常活跃的研究移动机器人,来减少智能机器人所存在的许多问题。
我们在许多场合利用移动机器人做了许多事,充分发挥它的作用,但是这就造成现在研究移动机器人时所面临的情形变得严峻起来,而要解决的问题也随之增加。生活中常常有一些转角又多又窄的环境需要机器人去探索,那么它如何才能又快又好地在这些困难的环境中执行人们希望它能完成的任务。研发两轮平衡机器人的想法开始萌芽。这种机器人采用了一根轴上平行着两个轮子,且各自能够使自己运行的差分式驱动方式,在车轮轴偏上的位置将之定义为重心,小车通过车轮的前后滚动来维持车身的平衡,而且还可以在这种姿态下成功做到前后左右不同转向及移动。正是因为小车能够拥有如此特殊的结构,所以它适应地形变化的能力较强,且行动灵活,可以承担一些复杂环境中的工作任务。
出于对两轮平衡机器人的热爱,世界各国加紧对其关注,并加快研究的步伐,这不仅是因为它拥有两轮共轴这样独特的外形,更是因为其不稳定本质,所以给机器人热爱者们提供了良好的研究基础。所以具有较高的研究价值。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


